Фильтр Калмана-Бьюси при цветном шуме наблюдения
Продифференцируем это равенство по времени и подставим в него выражения для х и у из (11.47а) и (11.43) соответственно. Тогда получим. Рассмотрим задачу линейного оптимального оценивания при условии, что шум объекта является белым, шум наблюдения — цветным. При записи скалярных уравнений учтена симметричность дисперсионной матрицы (pi2 = P2i) — Начальные условия имеют вид. Итак, если матрица Ro… Читать ещё >
Фильтр Калмана-Бьюси при цветном шуме наблюдения (реферат, курсовая, диплом, контрольная)
Рассмотрим задачу линейного оптимального оценивания при условии, что шум объекта является белым, шум наблюдения — цветным.

Постановка задачи. Пусть управляемая система описывается уравнениями где х° — случайная величина и Vo, V" — белые шумы с вероятностными характеристиками.
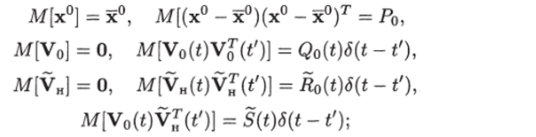
где.
Фильтр Калмана-Бьюси описывается уравнениями Дисперсионное уравнение имеет следующий вид:

или, в скалярной форме,.

При записи скалярных уравнений учтена симметричность дисперсионной матрицы (pi2 = P2i) — Начальные условия имеют вид.

Qo, Р0 — положительно полуопределенные матрицы; Rq — положительно определенная матрица; случайная величина х° не коррелирована с шумами Vq (?) и VH(?).
Требуется на основе наблюдения выхода у(t) на интервале [?о>?] определить несмещенную линейную оценку x (t) фазового вектоЗдесь (11.42а) является уравнением объекта, (11.426) — уравнением наблюдения, в котором z — цветной шум наблюдения, (11.42в) — уравнение формирователя, формирующего из белого шума V, шум наблюдения.
Данную задачу преобразуем в задачу фильтрации с белыми шумами. Из уравнений (11.42) находим.

Введем новый вектор наблюдения.

После подстановки сюда выражений для у и у получим где 
В преобразованном уравнении наблюдения (11.44) шум VH является белым, а его интенсивность Ro и интенсивность взаимной корреляционной функции его и шума объекта So определяются следующим образом:

Из последнего равенства следует, что шум объекта Vo и шум V" преобразованного уравнения наблюдения будут коррелированы, хотя шум объекта Vo и шум V, на входе формирователя не коррелированы.
(S = 0).
Итак, если матрица Ro положительно определена, то оптимальный фильтр, согласно теореме 11.3, описывается уравнениями.

Новый вектор наблюдения определяется соотношением (11.43). Однако в это соотношение входит производная у; это делает необходимым дифференцирование наблюдаемой переменной, что нежелательно.
Рассмотрим другой способ получения оптимальной оценки, исключающий необходимость дифференцирования. Введем вектор х, определяемый соотношением.

pa x (?), обеспечивающую минимум среднему квадрату ошибки:

Продифференцируем это равенство по времени и подставим в него выражения для х и у из (11.47а) и (11.43) соответственно. Тогда получим 
или, принимая во внимание (11.48),.

В последнее уравнение производная у не входит. Из него определяется х, а затем из (11.48) находится искомая оценка.
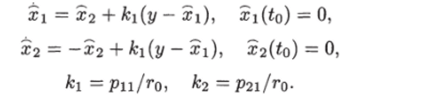
Пример 11.5. Объект и наблюдение описываются уравнениями.

Шум наблюдения является стационарным случайным процессом с характеристиками 
Решение. Уравнение формирователя имеет вид (см. пример 11.4)  В данном случае.
В данном случае.

Поэтому из (11.45) и (11.46) получаем Из (11.49) и (11.48) находим 

Так как So = 0, то А;0 и р определяются, согласно теореме 11.2, по формулам (11.146) и (11.14в):

Как легко проверить, отсюда имеем.

Выше были рассмотрены задачи оценивания, когда цветными являются или шум объекта, или шум наблюдения. Ясно, что, используя оба рассмотренных способа, можно решить задачу оценивания, когда цветными являются как шум объекта, так и шум наблюдения.