Электродвигатели постоянного тока с последовательным возбуждением
Известно, что реле имеют нелинейную характеристику управления, т. е. схема на рис. 8.7 позволяет осуществлять только нелинейное изменение скорости (см. рис. 8.1), что и является недостатком данной схемы. Плавную (линейную) характеристику такого серводвигателя можно получить, применив схему управления с искусственной линеаризацией, т. е. преобразовав нелинейную характе; Ное значение в начале… Читать ещё >
Электродвигатели постоянного тока с последовательным возбуждением (реферат, курсовая, диплом, контрольная)
Электродвигатели данного типа имеют две обмотки возбуждения, соединенные параллельно между собой и последовательно с обмоткой якоря, а намотанные встречно. В зависимости от желаемого направления вращения двигателя к источнику питания подключается ОВ1 или ОВ2 (рис 8.7). При переключении же этих обмоток магнитный поток возбуждения изменяет направление, а ток якоря остается прежним, т. е. знак крутящего момента изменяется на противоположный, в то время как его значение остается неизменным.
Особенность серводвигателей этого типа состоит в том, что ток в их цепи возбуждения равен току якоря и имеет максималь;
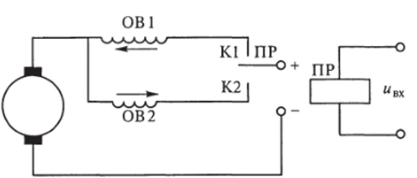
Рис. 8.7. Схема включения серводвигателя постоянного тока с последовательным возбуждением.
ное значение в начале разгона. Максимальному току соответствует максимальный пусковой момент, что способствует быстрому разгону двигателя, являющемуся его несомненным достоинством.
Переключение обмоток возбуждения или якоря в этих двигателях осуществляется, как правило, контактными или бесконтактными реле, которые в этом случае выполняют функции усилителя. На рис. 8.7 изображена схема включения электродвигателя с использованием поляризованного реле (ПР). В обмотку этого реле поступает управляющий сигнал, полярность которого определяет направление требуемого перемещения. При этом неважно какое значение имеет управляющий сигнал, если оно больше значения сигнала срабатывания реле.
Известно, что реле имеют нелинейную характеристику управления, т. е. схема на рис. 8.7 позволяет осуществлять только нелинейное изменение скорости (см. рис. 8.1), что и является недостатком данной схемы. Плавную (линейную) характеристику такого серводвигателя можно получить, применив схему управления с искусственной линеаризацией, т. е. преобразовав нелинейную характе;
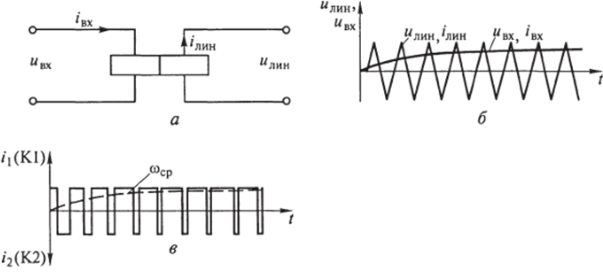
Рис. 8.8. Схема включения поляризованного реле (а) и графики токов во входных (б) и выходных (ипип достаточно большой частоты (но не большей, чем частота, возможная для срабатывания реле).
Вибрационную линеаризацию легко осуществить с помощью двухобмоточного поляризованного реле (рис. 8.8). Данная схема будет работать следующим образом.
Срабатывая под действием тока периодического сигнала, замыкаются поочередно контакты К1 и К2 поляризованного реле и поочередно включаются обмотки ОВ1 и ОВ2 (см. рис. 8.7). Но поскольку на реле действует и ток входного сигнала, то разность времени замкнутых состояний контактов К1 и К2 приблизительно пропорциональна входному сигналу (см. рис. 8.8), т. е. осуществляется широтно-импульсная модуляция выходных токов /| и /*2 током /вх. При этом двигатель как инерционный элемент усредняет сигналы /, и /2. Если не принимать во внимание малые колебания якоря двигателя с частотой линеаризации, то можно сказать, что скорость его вращения соср будет меняться плавно, пропорционально входному сигналу, как показано на рис. 8.8, в.