Синтез алгоритма управления в задаче слежения
Xi = Х2 + е"хзХ2, Х2 — хз, Хз = и не линеаризуема обратной связью по состоянию. Х = Х2 + е" «Х2хз, Х2 = хз, хз = и линеаризуема обратной связью по состоянию. И положительные числа ci, С2, сз, с* такие, что справедливы неравенства. Так как w (z^, z^) — гладкая функция, то выполняется условие Липшица. При законе управления уравнение замкнутой системы примет вид. Функцию Ляпунова для системы (6.29… Читать ещё >
Синтез алгоритма управления в задаче слежения (реферат, курсовая, диплом, контрольная)
Управление (6.26) легко можно распространить на задачу слежения, включив в него величину, определяющую желаемое движение.
Пусть 2/ж(?) определяет желаемую траекторию. Для ошибки слежения и ее производных по времени введем обозначения.
 aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
aside class="viderzhka__img" itemscope itemtype="http://schema.org/ImageObject">
При законе управления уравнение замкнутой системы примет вид.

Теорема 6.5. Пусть система (6.18) имеет относительную степень г < п и нуль-динамика экспоненциально устойчива.
Тогда если полином (6.25) устойчив и желаемая траектория уж(1) ^ ее г — 1 производных достаточно малы, то управление (6.28) обеспечивает сходимость к нулю ошибки слежения при неограниченном увеличении времени и ограниченность переменных внутренней динамики: 
Доказательство. Так как внешняя динамика системы (6.29), представляющая устойчивую линейную систему, экспоненциально устойчива, то ошибка слежения e (t) сходится к нулю экспоненциально. Поэтому достаточно показать, что внутреннее состояние z(2) остается ограниченным, когда e (t) -> 0 при t —? 00.
Для этого воспользуемся прямым методом Ляпунова. Но прежде всего отметим следующее.
- а) Так как по условию уж(*) и ее г — 1 производных достаточно малы (ограничены), то существует положительное число 5i такое, что уж < 6.
- б) Так как w (z^, z^) — гладкая функция, то выполняется условие Липшица

в) Так как нуль-динамика экспоненциально устойчива, то согласно теореме Красовского (см. гл. 7) для нее существуют функция Ляпунова где Р — положительно определенная матрица, удовлетворяющая уравнению Ляпунова 
/i — положительная постоянная. Как было установлено выше, матрица Ап является устойчивой. Поэтому положительно определенная матрица Р, удовлетворяющая уравнению Ляпунова, существует. Производная искомой функции Ляпунова по времени в силу уравнения (6.29) имеет вид.
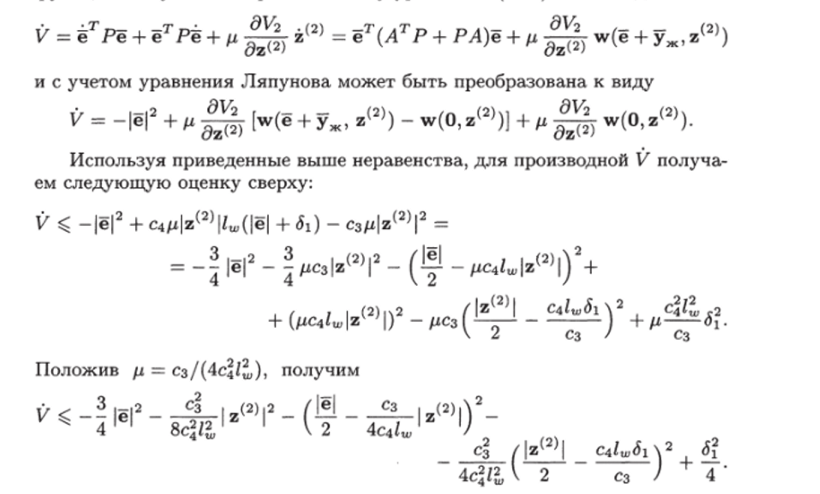
и положительные числа ci, С2, сз, с* такие, что справедливы неравенства.

Функцию Ляпунова для системы (6.29) будем искать в виде.

Исключив два отрицательных слагаемых (третье и четвертое), последнее неравенство можно представить в виде.
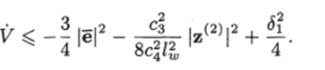
Отсюда следует, что производная V < 0, когда |ё| и |z(2)| принимают большие значения. Следовательно, переменные внутреннего состояния ограничены.
В общем случае устойчивость нуль-динамики гарантирует только локальную устойчивость (устойчивость в малом) системы управления, синтезированной на основе линеаризации обратной связью по выходу.
Задачи
- 1. Вычислить производные Ли 1-го и 2-го порядков функции h (x) по векторной функции f (x), если h (x) и f (x) имеют следующий вид:
- а) /i (x) = х + х, f (x) = (Х2 х + хъ)т
- б) /i (x) = xj + хХ2 + х, f (x) = (x2 + Xi х — х^)7;
- в) h (x) = х + х + х, f (x) = (х2 хз Xi-2x2-xl)T.
- 2. Вычислить скобки Ли 1-го и 2-го порядков функций g (x) и f (x), имеющих следующий вид:
- а) g (x) = (О 1)т, f (x) = (х Xi)T
- б) g (x) = (О 2)т, f (x) = (х х)т
- в) g (x) = (1 0)т, f (x) = (х2 А)Т
г) g (x) = (0 0 l)r, f (x) = {х2 + е~Х2х3 х3 0)т.
3. Показать линеаризуемость обратной связью по состоянию и определить соответствующие линеаризующие преобразования следующих систем:
a) xi = Х2, Х2 = х + и б) xi = Х2, &2 = х + 2и;
- в) Xi = Х2, Х2 = Х1Х2 + 2u; г) Xi = Х2, Х2 = Xi + u;
- д) xi = Х2 + u, Х2 = я?; е) xi = Х2 + и, Х2 = хх2-
- 4. Показать, что система
Х = Х2 + е" «Х2хз, Х2 = хз, хз = и линеаризуема обратной связью по состоянию.
5. Показать, что система
Xi = Х2 + е"хзХ2, Х2 — хз, Хз = и не линеаризуема обратной связью по состоянию.