Определение координат нескольких точек
Понятие о системе линейно-угловых ходов Совокупность линейно-угловых ходов, имеющих общие точки, называют системой ходов; узловой точкой называется точка, в которой сходятся не менее трех ходов. Как и для отдельного линейно — углового хода, для системы ходов применяют строгую и упрощенную обработку измерений; упрощенную обработку рассмотрим на примере системы из трех линейно-угловых ходов с одной… Читать ещё >
Определение координат нескольких точек (реферат, курсовая, диплом, контрольная)
Задача Ганзена В задаче Ганзена находят координаты двух точек P и Q по известным координатам двух пунктов A и B и четырем углам, измеренным на определяемых точках (рис. 2.15), то-есть, задача Ганзена является сдвоенной обратной угловой засечкой.
Исходные данные: XA, YA, XB, YB.
Измеренные элементы: в1, в2, в3, в4.
Неизвестные элементы: XP, YP, XQ, YQ.
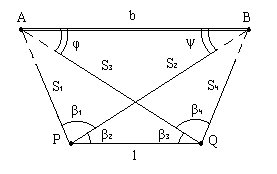
Рис. 15. Схема задачи Ганзена
Графическое решение. Взять два листа прозрачной бумаги (кальки) и построить на них углы: на одном листе — углы в1 и в2, на другом листе — углы в3 и в4. Наложить на чертеж (план или карту) оба листа и, перемещая их произвольным образом, совместить направления углов на этих листах с точками, А и В на чертеже. Переколоть точки P и Q на чертеж.
Аналитическое решение. Известно несколько способов решения задачи Ганзена; приведем краткое изложение одного из них.
Решить обратную задачу между пунктами A и B, то-есть, вычислить длину b отрезка AB и дирекционный угол бAB направления AB.
Ввести условную единицу длины, равную длине l отрезка PQ; l = 1.000.
Вычислить отрезки S'1 = AP, S'3 = AQ, S'2 = BP, S'4 = BQ в условных единицах с использованием теоремы синусов сначала для треугольника PAQ, затем для треугольника PBQ:
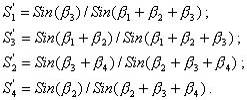
(55).
Вычислить в условных единицах длину b' отрезка AB из треугольника QAB по теореме косинусов:
(56).
и для контроля — из треугольника PAB:
(57).
Оба значения должны совпасть.
Вычислить масштабный коэффициент k:
k = b / b' (2.58).
и перевести все вычисленные расстояния в реальные единицы длины:
Вычислить угол ц из треугольника QAB по теореме косинусов:
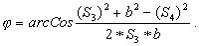
(60).
Вычислить угол ш из треугольника PAB по теореме косинусов:
(61).
Вычислить дирекционный угол направления AQ:
(62).
и решить прямую геодезическую задачу с пункта A на точку Q:
(63).
Вычислить дирекционный угол направления BP бBP= бBA — ц и решить прямую геодезическую задачу с пункта B на точку P:
Расположение исходных пунктов и определяемых точек может быть таким, что отрезки PQ и AB будут пересекаться (рис. 2.16); ход решения задачи остается таким же, только изменятся обозначения углов и сторон. Кроме того, доказано, что в этом варианте положение точек P и Q определяется в несколько раз точнее, чем в общем варианте.
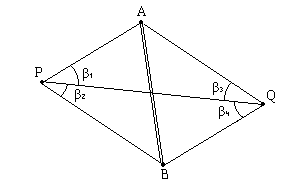
Рис. 16. Вариант задачи Ганзена
В однократной задаче Ганзена отсутствует контроль измерений, поэтому на практике четырьмя измерениями углов не ограничиваются, а выполняют какие-либо дополнительные измерения.
Линейно-угловой ход Классификация линейно-угловых ходов Для определения координат нескольких точек можно применить различные способы; наиболее распространенными из них являются линейно-угловой ход, система линейно-угловых ходов, триангуляция, трилатерация и некоторые другие.
Линейно-угловой ход представляет собой последовательность полярных засечек, в которой измеряются горизонтальные углы и расстояния между соседними точками (рис. 17).
Рис. 17. Схема линейно-углового хода
Исходными данными в линейно-угловом ходе являются координаты XA, YA пункта A и дирекционный угол бBA линии BA, который называется начальным исходным дирекционным углом; этот угол может задаваться неявно через координаты пункта B.
Измеряемые величины — это горизонтальные углы в1, в2,…, вk-1, вk и расстояния S1, S2, Sk-1, Sk. Известны также ошибка измерения углов mв и относительная ошибка измерения расстояний mS / S = 1 / T.
Дирекционные углы сторон хода вычисляют последовательно по известным формулам передачи дирекционного угла через угол поворота для левых углов:
(64).
для правых углов: (65).
Для хода на рис. 2.17 имеем:
и т.д.
Координаты пунктов хода получают из решения прямой геодезичекой задачи сначала от пункта A к пункту 2, затем от пункта 2 к пункту 3 и так далее до конца хода.
Линейно-угловой ход, изображенный на рис. 2.17, применяется очень редко, так как в нем отсутствует контроль измерений; на практике, как правило, применяются ходы, в которых предусмотрен такой контроль.
По форме и полноте исходных данных линейно-угловые ходы подразделяются на следующие виды:
разомкнутый ход (рис. 18): исходные пункты с известными координатами и исходные дирекционные углы есть в начале и в конце хода;
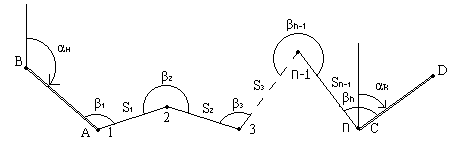
Рис. 18. Схема разомкнутого линейно-углового хода
Если в начале или в конце хода нет исходного дирекционного угла, то это будет ход с частичной координатной привязкой; если исходных дирекционных углов в ходе совсем нет, то это будет ход с полной координатной привязкой.
Замкнутый линейно-угловой ход (рис. 19) — начальный и конечный пункты хода совмещены; один пункт хода имеет известные координаты и называется исходным пунктом; на этом пункте должно быть исходное направление с известным дирекционным углом, и измеряется примычный угол между этим направлением и направлением на второй пункт хода.
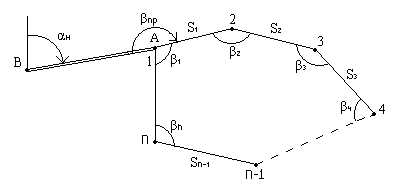
Рис. 19. Схема замкнутого линейно-углового хода
Висячий линейно-угловой ход (рис. 17) имеет исходный пункт с известными координатами и исходный дирекционный угол только в начале хода.
Свободный линейно-угловой ход не имеет исходных пунктов и исходных дирекционных углов ни в начале, ни в конце хода.
По точности измерения горизонтальных углов и расстояний линейно-угловые ходы делятся на две большие группы: теодолитные ходы и полигонометрические ходы.
В теодолитных ходах горизонтальные углы измеряют с ошибкой не более 30″; относительная ошибка измерения расстояний mS/S колеблется от 1/1000 до 1/3000.
В полигонометрических ходах горизонтальные углы измеряют с ошибкой от 0.4″ до 10″, а относительная ошибка измерения расстояний mS/S бывает от 1/5000 до 1/300 000. По точности измерений полигонометрические ходы делятся на два разряда и четыре класса.
Вычисление координат пунктов разомкнутого линейно-углового хода Каждый определяемый пункт линейно-углового хода имеет две координаты X и Y, которые являются неизвестными и которые нужно найти. Общее количество пунктов в ходе обозначим через n, тогда количество неизвестных будет 2 * (n — 2), так как у двух пунктов (исходных начального и конечного) координаты известны. Для нахождения 2 * (n — 2) неизвестных достаточно выполнить 2 * (n — 2) измерений.
Подсчитаем, сколько измерений выполняется в разомкнутом линейно-угловом ходе: на n пунктах измерено n углов — по одному на каждом пункте, измерены также (n — 1) сторон хода, всего получается (2 * n — 1) измерений (рис. 18).
Разность между количеством выполненных измерений и количеством необходимых измерений равна:
(65).
то-есть, три измерения являются избыточными: это угол на предпоследнем пункте хода, угол на последнем пункте хода и последняя сторона хода. Но тем не менее, эти измерения выполнены, и их необходимо использовать при вычислении координат пунктов хода.
В геодезических построениях каждое избыточное измерение порождает какое-либо условие, поэтому количество условий равно количеству избыточных измерений; в разомкнутом линейно-угловом ходе должны выполняться три условия: условие дирекционных углов и два координатных условия.
Условие дирекционных углов. Вычислим последовательно дирекционные углы всех сторон хода, используя формулу передачи дирекционного угла на последующую сторону хода:
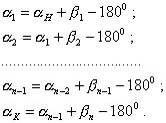
(66).
Сложим эти равенства и получим:
откуда.
и (67).
Это — математическая запись первого геометрического условия в разомкнутом линейно-угловом ходе. Для правых углов поворота оно запишется так:
(68).
Сумма углов, подсчитанная по формулам (67) и (68), называется теоретической суммой углов хода. Сумма измеренных углов вследствие ошибок измерений, как правило, отличается от теоретической суммы на некоторую величину, называемую угловой невязкой и обозначаемую fв:
(69).
Допустимое значение угловой невязки можно рассматривать как предельную ошибку суммы измеренных углов:
(70).
Используем известную формулу из теории ошибок для нахождения средней квадратической ошибки функции в виде суммы аргументов (раздел 1.11.2):

(71).
При.
получим.


или (72).
После подстановки (72) в (70) получаем:
(73).
Для теодолитных ходов mв = 30″, поэтому:

(74).
Одним из этапов уравнивания является введение поправок в измеренные величины с целью приведения их в соответствие с геометрическими условиями. Обозначим поправку в измеренный угол Vв и запишем условие:
откуда следует, что:
(75).
то-есть, поправки в углы следует выбрать так, чтобы их сумма была равна угловой невязке с противоположным знаком.
В уравнении (75) n неизвестных, и для его решения необходимо наложить на поправки Vв (n-1) дополнительных условий; наиболее простым вариантом таких условий будет:
(76).
то-есть, все поправки в измеренные углы одинаковы. В этом случае решение уравнения (75) получается в виде:
(77).
это означает, что угловая невязка fв распределяется с обратным знаком поровну во все измеренные углы.
Исправленные значения углов вычисляются по формуле:
(78).
По исправленным углам поворота вычисляют дирекционные углы всех сторон хода; совпадение вычисленного и заданного значений конечного исходного дирекционного угла является контролем прави льности обработки угловых измерений.
Координатные условия. Решая последовательно прямую геодезическую задачу, вычислим приращения координат по каждой стороне хода ДXi и ДYi. Координаты пунктов хода получим по формулам:
(79).
Сложим эти равенства и получим для приращений ДXi:
После приведения подобных имеем:
(80).
Аналогичная формула для суммы приращений ДY имеет вид:
(81).
Получились еще два условия (80) и (81), которые называются координатными. Суммы приращений координат, подсчитанные по этим формулам, называются теоретическими суммами приращений. Вследствие ошибок измерения сторон и упрощенного способа распределения угловой невязки суммы вычисленных приращений координат в общем случае не будут равны теоретическим суммам; возникают так называемые координатные невязки хода:
(82).
по которым вычисляют абсолютную невязку хода:
(83).
и затем относительную невязку хода:
(84).
Уравнивание приращений ДX и ДY выполняют следующим образом.
Сначала записывают суммы исправленных приращений:
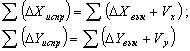
и приравнивают их теоретическим суммам:
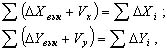
откуда следует, что:

(85).
В этих уравнениях по (n — 1) неизвестных и для их решения необходимо наложить на поправки VX и VY дополнительные условия. На практике поправки в приращения координат вычисляют по формулам:
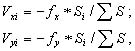
(91).
которые соответствуют условию «поправки в приращения координат пропорциональны длинам сторон».
Рассмотренный способ обработки измерений в линейно-угловом ходе можно назвать способом последовательного распределения невязок; строгое уравнивание линейно-углового хода выполняется по методу наименьших квадратов.
После уравнивания одиночного линейно-углового хода ошибки положения его пунктов неодинаковы; они возрастают от начала и конца хода к его середине, и наибольшую ошибку положения имеет пункт в середине хода. В случае приближенного уравнивания эта ошибка оценивается половиной абсолютной невязки хода fs. При строгом уравнивании хода производится сплошная оценка точности, то-есть вычисляются ошибки положения каждого пункта хода, ошибки дирекционных углов всех сторон хода, а также ошибки уравненных значений углов и сторон хода.
Вычисление координат пунктов замкнутого линейно-углового хода Вычисление координат пунктов в замкнутом линейно-угловом ходе выполняется в том же порядке, что и в разомкнутом ходе; отличие состоит в вычислении теоретических сумм углов и приращений координат. Если в замкнутом ходе измерялись внутренние углы, то;
если внешние, то (92).

и (93).
Привязка линейно-угловых ходов Под привязкой разомкнутого линейно-углового хода понимают включение в ход двух пунктов с известными координатами (это начальный и конечный исходные пункты хода) и измерение на этих пунктах углов между направлением с известным дирекционным углом (бнач и бкон) и первой (последней) стороной хода; эти углы называются примычными. Как уже отмечалось ранее, если на начальном или (и) конечном пункте хода примычный угол не измеряется, то имеет место частичная (полная) координатная привязка хода.
Привязка замкнутого линейно-углового хода — это включение в ход одного пункта с известными координатами и измерение на этом пункте примычного угла, то-есть, угла между направлением с известным дирекционным углом и первой стороной хода.
Кроме этих стандартных ситуаций встречаются случаи, когда линейно-угловой ход начинается или заканчивается на пункте с неизвестными координатами. В таких случаях возникает дополнительно задача определения координат этого пункта.
Самый простой способ определения координат одного пункта — геодезические засечки; если вблизи определяемого пункта есть несколько известных пунктов, то, выполнив k угловых и (или) линейных измерений (k>2), можно вычислить искомые координаты по стандартным алгоритмам. Если такой возможности нет, то возникают особые случаи привязки; рассмотрим некоторые из них.
Снесение координат с вершины знака на землю. На рис. 2.20: P — определяемый пункт, T1, T2, T3 — пункты с известными координатами, которые можно использовать лишь в качестве визирных целей. С пункта P можно измерить только два угла по программе обратной угловой засечки, что недостаточно; кроме того, при малом расстоянии между пунктами P и T1, угол засечки очень маленький и точность засечки невысокая. Закладывают два временных пункта A1 и A2 и измеряют расстояния b1 и b2 и углы в1, в2, в3, в4, в5, в6.
Таким образом, общее число измерений равно 8, а количество неизвестных — 6 (координаты трех пунктов). Обработку этого геодезического построения необходимо выполнять уравниванием по МНК;
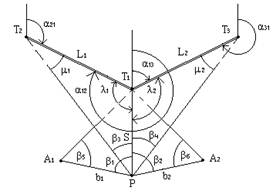
Рис. 20.
приближенное решение можно получить по конечным формулам, приведенным ниже: вычисление расстояния s (s = T1P) два раза: из треугольников PA1T1 и PA2T2 и затем среднего из двух:
решение обратной геодезической задачи между пунктами T1 и T2 (вычисление б12, L1) и T1 и T3 (вычисление б13, L2), вычисление углов м1 и м2 из треугольников PT2T1 и PT3T1:
;
вычисление углов л1 и л2 из треугольников PT2T1 и PT3T1:
вычисление дирекционного угла линии T1P:
решение прямой геодезической задачи из пункта T на пункт P:
Привязка линейно-углового хода к стенным маркам. Стенные марки закладываются в цокольный этаж или в стену капитального здания; конструкции их бывают различными. Закладка стенных марок и определение их координат выполняется при создании геодезических сетей на территории населенных пунктов и промышленных предприятий; в дальнейшем эти марки играют роль опорных пунктов в последующих геодезических построениях.
Привязка линейно-углового хода может быть выполнена к двум, трем или более стенным маркам.
Схема привязки хода к двум маркам A и B показана на рис. 21.
На линии AB с помощью рулетки измеряется отрезок S, и координаты точки P находятся из решения прямой геодезической задачи по формулам:
где б — дирекционный угол направления AB.
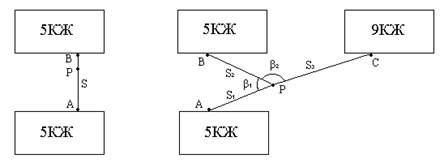
Рис. 2.21 Рис. 22
Схема привязки к трем маркам A, B, C показана на рис. 22. С помощью рулетки измеряются расстояния S1, S2, S3 и решается многократная линейная засечка; для большей надежности можно измерить углы в1 и в2 и решить комбинированную засечку.
В качестве примычного направления с известным дирекционным углом можно использовать либо направление на одну из стенных марок, либо направление на какой-нибудь другой пункт с известными координатами.
Кроме метода засечек при привязке ходов к стенным маркам применяют также полярный метод и метод редуцирования. В [28] на стр. 195 — 201 приведено подробное описание этих методов, а так же даны числовые примеры.
Понятие о системе линейно-угловых ходов Совокупность линейно-угловых ходов, имеющих общие точки, называют системой ходов; узловой точкой называется точка, в которой сходятся не менее трех ходов. Как и для отдельного линейно — углового хода, для системы ходов применяют строгую и упрощенную обработку измерений; упрощенную обработку рассмотрим на примере системы из трех линейно-угловых ходов с одной узловой точкой (рис. 2.23). Каждый ход опирается на исходный пункт с известными координатами; на каждом исходном пункте имеется направление с известным дирекционным углом.
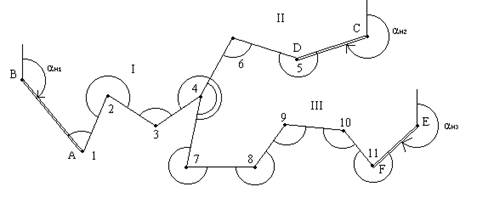
Рис. 23. Система линейно-угловых ходов с одной узловой точкой
Одну сторону какого-либо хода, проходящую через узловую точку, принимают за узловое направление (например, сторону 4 — 7) и вычисляют ее дирекционный угол по каждому ходу в отдельности, начиная от начального дирекционного угла в ходе. Получают три значения дирекционного угла узлового направления:
б1 — из первого хода,.
б2 — из второго хода,.
б3 — из третьего хода, и вычисляют средневесовое значение из трех, причем за вес отдельного значения принимают число 1 / ni, где ni — количество углов в ходе от исходного направления до узлового направления (на рис. 20 n1 = 4, n2 = 3, n3 = 5):
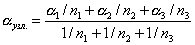
(94).
Считая узловое направление исходным, то-есть, имеющим известный дирекционный угол, вычисляют угловые невязки в каждом ходе по отдельности и вводят поправки в измеренные углы. По исправленным углам вычисляют дирекционные углы всех сторон каждого хода и затем — приращения координат по всем сторонам ходов.
По приращениям координат вычисляют координаты узловой точки по каждому ходу в отдельности и получают три значения координаты X и три значения координаты Y узловой точки.
Средне-весовые значения координат подсчитывают по формулам:
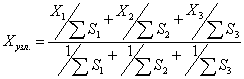
(95),.
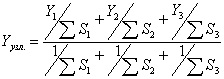
(96).
Считая узловую точку исходным пунктом с известными координатами, вычисляют координатные невязки для каждого хода в отдельности и вводят поправки в приращения координат по сторонам ходов. По исправленным приращениям координат вычисляют координаты пунктов всех ходов.
Если сказать кратко, то упрощенная обработка системы линейно — угловых ходов с одной узловой точкой состоит из двух этапов: получение дирекционного угла узлового направления и координат узловой точки и обработка каждого хода в отдельности.