Определение коэффициента полезного действия планетарного механизма
Анализ движения механизма под действием сил Динамические давления — это дополнительные усилия, которые возникают в кинематических парах при движении механизма. Эти давления являются причиной вибраций некоторых звеньев механизма, они переменны по величине и направлению. Станина данного механизма тоже испытывает динамические давления, которые оказывают вредное воздействие на его крепления и нарушая… Читать ещё >
Определение коэффициента полезного действия планетарного механизма (реферат, курсовая, диплом, контрольная)
К.п.д. механической передачи зависит от многих факторов, из которых наибольшее значение имеют потери мощности в зацеплении пар зубчатых колес. Определим к.п.д. планетарного редуктора при передаче моментов от звена 1 к звену 2 по формуле:






где называется силовым передаточным отношением. Здесь и — моменты, действующие на звенья 2 и 1 с учетом трения в зацеплении — кинематическое передаточное отношение.
Силовой расчет кулачковых механизмов
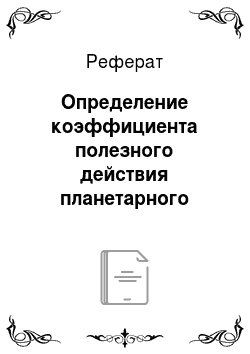
Так как ведомое звено (штанга-толкатель)-движется с переменной скоростью, то схемы действия сил, приложенных к кулачковому механизму на разных участках интервала его перемещения, различны.
В интервале рабочего перемещения к ведомому звену приложена сила полезного сопротивления R, направленная против скорости звена. Сила R, как правило, всегда задана; она может быть постоянной или переменной.
Если в механизме осуществлено силовое замыкание высшей пары, то на ведомое звено в том же направлении действует упругая сила PП пружины, которая в это время сжимается.
Из-за неравномерного движения штанги возникает сила инерции:

.

где — масса штанги, —ее ускорение; направлена сила Ра противоположно ускорению штанги. Так как масса штанги постоянная, то закон (график) изменения силы совпадает с законом (графиком) изменения ускорения штанги.
Равнодействующая Q всех сил, приложенных к штанге равна:

Если пренебречь трением в паре кулачок — штанга, то направление силы P давления кулачка на штангу совпадает с нормалью к профилю кулачка. Если не учитывать трение в направляющей C, то, для того чтобы штанга двигалась по заданному закону, надо, чтобы в каждом положении механизма сила P давления кулачка на штангу равнялась бы.

.
где — угол между силой и направлением движения штанги — угол передачи движения.
Если не учитывать трение в подшипниках вала кулачка, то движущий момент на валу кулачка.

.
где — радиус-вектор профиля кулачка.
Самоторможение. Учитывая силы трения при силовом расчете механизма, можно выявить такие соотношения между параметрами механизма, при которых вследствие трения движение звена в требуемом направлении не может начаться независимо от величины движущей силы.
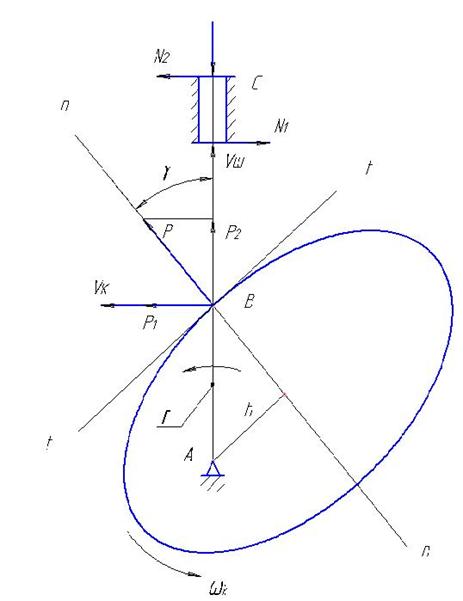
Рис. 20.
В большинстве механизмов самоторможение недопустимо, но в некоторых случаях оно используется для предотвращения самопроизвольного движения в обратном направлении (домкрат, некоторые типы подъемных механизмов и др.).
Угол давления. Углом давления на звено со стороны звена называется угол между направлением силы давления (нормальной реакции) на звено со стороны звена и скоростью точки приложения этой силы. Угол давления на звено со стороны звена обозначается через. Часто, однако, рассматривается лишь один угол давления. Тогда индексы в обозначениях опускаются.
4. Анализ движения механизма под действием сил Динамические давления — это дополнительные усилия, которые возникают в кинематических парах при движении механизма. Эти давления являются причиной вибраций некоторых звеньев механизма, они переменны по величине и направлению. Станина данного механизма тоже испытывает динамические давления, которые оказывают вредное воздействие на его крепления и нарушая тем самым связь станины с фундаментом. Также динамические давления увеличивают силы трения в точках опоры вращающихся валов, увеличивают износ подшипников. Поэтому при проектировании механизмов стараются достичь полного или частичного погашения динамических давлений (задача об уравновешивании сил инерции механизмов).
Звено механизма будет считаться уравновешенным, если его главный вектор и главный момент сил инерции материальных точек будут равны нулю. Неуравновешенным может быть каждое звено механизма в отдельности, но механизм при этом в целом может быть уравновешен полностью или частично. Проблему уравновешивания сил инерции в механизмах можно разделить на две задачи: 1) об уравновешивании давлений в кинематических парах механизма 2) об уравновешивании давлений механизма в целом на фундамент.
Огромное значение имеет уравновешивание вращающихся звеньев. Незначительный дисбаланс быстро вращающихся роторов и электродвигателей вызывает большие динамические давления на подшипники.
Задача об уравновешивании вращающихся тел состоит в таком выборе их масс, при котором произойдёт полное или частичное погашение добавочных инерционных давлений на опоры.
Результирующая центробежная сила инерции:

Результирующий момент всех сил инерции тела относительно плоскости, проходящей через центр масс.

.
где m — масса всего тела,.
— расстояние центра S масс тела от оси вращения;
— центробежный момент инерции относительно оси вращения и плоскости, перпендикулярной к оси вращения и проходящей через центр S масс тела.

При вращение тела угол между векторами и сохраняет всё время одно и тоже значение. Если результирующая сила инерции и результирующий момент сил инерции равны нулю, тогда тело будет полностью уравновешенным, а значит вращающееся тело не оказывает никаких динамических давлений на опоры.



Эти условия будут выполняется только тогда, когда центр масс тела будет лежать на оси вращения, которая будет являться одной из его главных осей инерции. Если одновременно выполняются равенства (4.1) и (4.2), то центробежный момент инерции будет равен нулю. Если выполняется (4.1) условие, то тело считается уравновешенным статически, если выполняется (4.2) условие, то тело считается уравновешенным динамически.
Статический дисбаланс измеряется статическим моментом.
G — вес вращающегося тела, н.
Динамический дисбаланс вращающегося тела измеряется величиной.

На практике неуравновешенное тело уравновешивают при помощи противовесов. Вращающиеся тела, у которых общая длина, а значительно меньше их диаметра, имеют незначительные центробежные моменты инерции; поэтому такие тела достаточно уравновесить только статически.
Предположим, что тело, А статически неуравновешенно. В простейшем случае противовес помещают на линии, проходящей через центр тяжести S, по другую сторону от оси вращения на расстоянии от неё. (рис. 21).
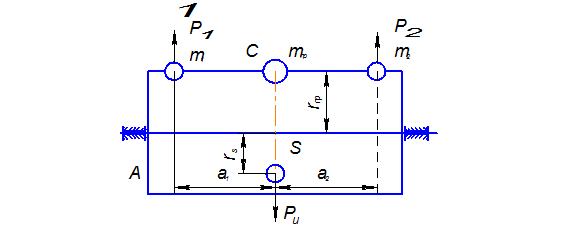
Рис. 21.
Массу противовеса находим из уравнения (4.1):

Вместо установки противовеса можно удалить часть массы. Величина удаляемой массы определяется по формуле (4.5). Иногда плоскость крепления противовеса не может быть выбрана конструктивно в той плоскости вращения, в которой расположены неуравновешенные массы. В этом случае можно установить два противовеса в двух перпендикулярных к оси вращения плоскостях, обычно называемых плоскостями исправления, но при этом необходимо исключить возможность появления давления на опоры не только от результирующей силы инерции, но и от моментов сил инерции. Массы и противовесов определяем вы соответствии с формулами (4.1) и (4.2) из уравнений.


Сложив массы этих противовесов, получим.


Полное уравновешивание вращающегося тела может быть достигнуто также при помощи двух противовесов, расположенных в произвольно выбранных плоскостях 1 и 2 и на произвольных расстояниях от оси вращения.
Вращающиеся тела обычно выполняют так, чтобы они были уравновешены сами по себе. Чаще всего вращающиеся тела выполняют в форме одного или нескольких цилиндров, имеющих общую ось, совпадающую с осью вращения тела. Однако во многих случаях такая форма не может быть выполнена и вращающееся тело без противовесов является неуравновешенным. Для определения величины и положения противовесов необходимо по чертежу выделить уравновешенную часть тела и определить для оставшихся частей — колен, кулачков и т. д. центры тяжести их, считая, что в них сосредоточены массы этих частей.
Предположим, что для какого-либо тела все его неуравновешенные массы свелись к трём неуравновешенным массам (рис. 22). Пользуясь методом приведения вектора к заданному центру, можно любое число вращающихся в различных плоскостях масс уравновесить двумя противовесами. Пусть центры тяжести масс и расположены в трёх плоскостях, перпендикулярных к оси вращения. Условия отсутствия давления на подшипники от главного вектора и главного момента относительно центра приведения О1 центробежных сил инерции выражаются уравнениями:





Строим многоугольники векторов сил и векторов моментов (рис. 22 г, д). Уравновешивающим в первом случае является вектор, изображённый в плоскости 2 вектором, (рис. 22 в) а во втором — вектор (рис. 22 д), изображающий повёрнутый момент пары векторов, расположенного в плоскости 1, и, расположенного в плоскости 2. Каждый из них равен по величине. Таким образом, заданные массы и будут полностью уравновешены двумя массами, расположенными вдоль в плоскости 1 и вдоль равнодействующей в плоскости 2. Из изложенного следует, что:

1.) любое количество вращающихся масс, расположенных в одной плоскости вращения, уравновешивается одним противовесом, находящимся в той же плоскости, при соблюдении условия равновесия.


Рис. 22.
2.) любое количество масс, лежащих в разных плоскостях вращения, уравновешивается двумя противовесами, установленными в двух произвольных плоскостях, перпендикулярных к оси вращения, при соблюдении двух условий равновесия:

Для уравновешивания плоского механизма на фундаменте необходимо и достаточно так подобрать массы звеньев этого механизма, чтобы общий центр масс движущихся звеньев его оставался неподвижным:
и центробежные моменты инерции масс звеньев относительно осей x и z, y и z были постоянными:
При соблюдении этих условий будут уравновешены главный вектор сил инерции и главные моменты сил инерции относительно осей x и y. Главный момент сил инерции относительно оси z, перпендикулярной к плоскости движения механизма, уравновешивается моментом движущих сил и сил сопротивлений на главном валу машины. На практике при уравновешивании механизмов указанные условия (4.9) и (4.10) выполняются частично.
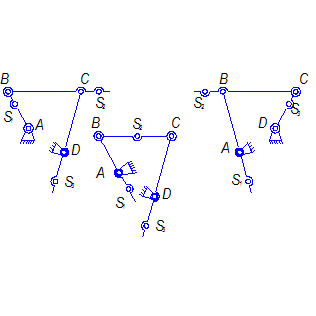
Рис. 23.
Пусть, например, дан механизм шарнирного четырёхзвенника ABCD (рис. 23) требуется уравновесить только главный вектор сил инерции. Обозначим массы звеньев AB, BC и CD соответственно через и; длины звеньев — через и, а расстояние центров тяжести и этих звеньев от точек А, В и С — через и. Для удовлетворения условия (4.9.) необходимо, чтобы общий центр S масс механизма находился на прямой AD, либо между точками, А и D, либо за ними. В этом случае центр S масс механизма при его движении будет оставаться неподвижным и, следовательно, главный вектор сил инерции механизма будет уравновешен.
Массы звеньев и положения центров тяжести их должны быть подобраны так, чтобы.
Если механизм состоит из n подвижных звеньев, то при решение задач о подборе масс механизма, удовлетворяющих условию уравновешенности главного вектора сил инерции механизма, имеем 2n неизвестных величин; уравнений же, связывающих эти величины, можно составить (n-1). После произвольного выбора (n+1) величин остальные величины получают определённые значения. В исследуемом механизме количество подвижных звеньев n=3, количество подбираемых величин 2n=6, число же независимых уравнений n-1=2. Таким образом, задаваясь, например, значениями m3 и s3, из уравнения (4.12) получаем значение m2s2, в котором можно задаваться одним из неизвестных и получать другое. Подставляя полученные значения в уравнение (4.11), определяем значение m1s2, в котором также можно задаться одной величиной. Из уравнений (4.11) и (4.12) при различных исходных заданиях можно получить три варианта схем уравновешенного четырёхзвенного механизма Рис. 23(а, в, д). Следовательно, если считать, что расположение центра тяжести звена за его шарнирами соответствует как бы установке противовеса, то можно сказать, что задачу уравновешивания главного вектора сил инерции механизма шарнирного четырёхзвенника можно решить путём установки противовесов на двух его звеньях.
Аналогичным образом можно решить задачу подбора масс отдельных звеньев для уравновешивания шарнирного шестизвенника и любого механизма, образованного путём наслоения двухповодковых групп. Дав уравнения (9.) можно заменить одним векторным уравнением Где rs— вектор, определяющий положение общего центра масс.
Условие (4.13) удовлетворяется в частности, когда rs=0; это условие приводит к способу подбора механизмов с симметрично расположенными звеньями равных масс.

Рис. 24.
На рисунке 24 показаны схемы симметричных кривошипно-ползунного и шарнирного четырёхзвенного механизмов. В тех случаях, когда размещение звеньев в симметричных механизмах очень громоздко или подбор масс конструктивно нецелесообразен, применяется метод установки противовесов.
Пусть, например, требуется уравновесить только главный вектор сил инерции кривошипно-ползунного механизма, схема которого изображена на рисунке 25. Обозначим массы кривошипа 1, шатуна 2 и ползуна 3 через m1, m2, m3 и будем считать их сосредоточенными соответственно в центрах тяжести S1, S2 и В звеньев. Устанавливаем на линии АВ в точке D противовес и определяем его массу mпр из условия, чтобы центр тяжести масс mпр, m2 и m3 совпадал с точкой А. Из уравнения статических моментов относительно точки, А имеем.
Массу, противовеса, установленного в точке С кривошипа, определяем из условия, чтобы центр тяжести масс, и совпадал с точкой О. Из уравнения статических моментов относительно точки О находим.

Радиусы s и с противовесов выбираются произвольно. После установки противовесов центр масс механизма во всех его положениях будет совпадать с точкой О и, следовательно, будет во всё время работы оставаться неподвижным. Таким образом, два противовеса и полностью уравновешивают все силы инерции рассматриваемого механизма. Однако подобное полное уравновешивание сил инерции кривошипно-ползунных механизмов на практике применяют редко, так как при малом значении радиуса с масса получается весьма большой, что ведёт к появлению добавочных нагрузок в кинематических парах и звеньях механизма. При большом значении радиуса с сильно увеличиваются габаритные размеры всего механизма. Поэтому, часто ограничиваются лишь приближённым уравновешиванием сил инерции. Так, в кривошипно-ползунных механизмах метод установки противовеса на кривошипе является наиболее распространённым методом приближённого уравновешивания сил инерции. В этих механизмах на практике часто применяют уравновешивание только массы кривошипа и части массы шатуна.

Рис. 25.
При решении некоторых вопросов динамики механизма с одной степенью свободы можно применить закон изменения кинетической энергии, который формулируется так: приращение кинетической энергии механизма на конечном его перемещении равно алгебраической сумме работ всех задаваемых сил.

.

где — кинетическая энергия механизма в произвольном положении.

— кинетическая энергия механизма в начальном положении.

— алгебраическая сумма работ всех сил и моментов, приложенных к механизму Для плоскопараллельного движения:
.
где — момент инерции звена относительно оси проходящей через центр масс S.
По характеру изменения кинетической энергии полный цикл работы машинного агрегата в общем случае складывается из трех частей: разгона (пуска), установившегося и выбега (остановки) (рис. 4.6). Время tp характеризуется увеличением скорости ведущего звена, а это возможно когда >, а за время выбега <, т. е. кривая зависимости кинетической энергии в первом случае монотонно возрастает, во втором случае — монотонно убывает.
Установившееся движение является более продолжительным. В течение этого этапа выполняется полезная работа, для совершения которой предназначен механизм. Поэтому полное время установившегося движения может состоять из любого числа циклов движения, соответствующих одному или нескольким оборотам кривошипа.
Имеем два варианта установившегося движения.
Первый вариант: кинетическая энергия T механизма в течение всего режима движения постоянна. Пример: система зубчатых колес, вращающихся с постоянными угловыми скоростями, обладает постоянной кинетической энергией.
Второй вариант: характеризуется периодичностью движения ведущего вала механизма с небольшими колебаниями T внутри периода. Периодичность может включить один или два оборота кривошипа, например, для двигателя периодичность изменения Tдва оборота кривошипа.
Весь поток энергии, подводимой к машине, а также кинетическая энергия самой машины в процессе ее работы может быть сбалансирована так:

.
гдеработа сил движущая.
— работа сил полезного сопротивления.

- -работа сил трения
- -работа сил тяжести
- -работа сил инерции
Для времени установившегося движения, когда в конце цикла и в начале следующего цикла величина скорости одинакова, т. е. работа и равны нулю, т. е.

Пренебрегая силой трения, имеем.

Это уравнение является основным энергетическим уравнением установившегося периодического движения механизма.
Угловая скорость ведущего звена в пределах цикла установившегося движения в общем случае является величиной переменной.
Изменения угловой скорости звена приведения вызывают в кинематических парах дополнительные (динамические) давления, которые снижают общий КПД машины, надежность ее работы и долговечность. Кроме того, колебания скоростей ухудшают рабочий процесс машины.
Колебание скорости является следствием двух факторов — периодического изменения приведенного момента инерции механизма и периодического характера действия сил и моментов.
Кроме периодических колебаний скоростей в механизме могут происходить колебания и непериодические, т. е. неповторяющиеся, вызываемые различными причинами, например внезапное изменение нагрузки.
Первый тип колебаний регулируется в пределах допустимой неравномерности движения, насаживанием на вал дополнительной массы (маховика).
Во втором случае задачу регулирования решают, устанавливая специальный механизм, называющийся регулятором.

Пределы допускаемого изменения угловой скорости устанавливают опытным путем. Неравномерность движения машины характеризуется отношением абсолютной неравномерности к ее средней скорости.

Обычно задают и, где.


Имея следующие соотношения:

Решаем совместно два уравнения (4.14) и находим:

Или пренебрегая величиной ввиду ее малости получаем:
Периодическая неравномерность хода машины, как правило, представляет вредное влияние и может быть допущена для большинства машин лишь в определенных пределах. Эти вредные явления в машинах выражаются, например, в следующем: рывки при движении транспортных машин, обрыв нити в текстильных машинах, перегревание обмоток электродвигателей, мигание света из-за неравномерности вращения якоря генератора электрического тока, недостаточная чистота и точность обработки поверхностей деталей на металлорежущих станках, неоднородность и не одинаковая толщина сварных швов при сварке с помощью сварочных автоматов, разрыв листа во время вытяжки изделий на прессах и т. п.
Допускаемая неравномерность хода машины задается коэффициентом д и зависит от назначения машины. Эти величины установлены многолетним опытом эксплуатации машины.
Таким образом, и отличаются от заданной средней угловой скорости на, что при д=1/25 составляет всего 2%, а при д=1/50 наибольшее отклонение составит всего 1% от. Отсюда видно, что даже при сравнительно больших д, движение ведущего звена машины достаточно равномерно.

Движение ведущего звена тем ближе к равномерному, чем больше приведенный момент инерции или приведенная масса механизма. Увеличение приведенных масс и момента инерции производится практически посадкой на вал машины маховика с определенной массой и моментом инерции.
При анализе работы машины и определении закона движения начального звена механизма с одной степенью свободы удобно оперировать не действительными массами, которые движутся с переменными скоростями, а массами, или эквивалентными, условно перенесенными на какое-либо звено механизма.
Точно так же силы или моменты, приложенные к отдельным звеньям, могут быть условно заменены силой или моментом, приложенным к какому-либо звену механизма.
Приведенной силой называется такая сила, мощность которой равна сумме мощностей всех сил, приложенных к звеньям.
Звено, к которому приложена приведенная сила, называется звеном приведения.
Мощность любой силы, приложенной в «» точке, исходя из предыдущего раздела, может быть определена как момент этой силы относительно конца вектора скорости.



Мощность можно записать через приведенный момент сил.

Приведенная масса есть такая фиктивная масса, сосредоточенная в точке звена приведения, кинетическая энергия которой равна кинетической энергии всего механизма.

.
гдеприведенный момент инерции звена,.
— угловая скорость звена приведения,.
— скорость точки В звена приведения.
Приведенный момент инерции Приведенным к главному валу (звену приведения) моментом инерции называется такой условный момент инерции, обладая которым главный вал имеет в данном положении машины кинетическую энергию, равную кинетической энергии всего механизма.
Большинство машин работает, как правило, в установившемся режиме, который характеризуется тем, что машина получает от двигателя за 1 цикл столько энергии, сколько она расходует её за то же время на производство работы, для которой она предназначена.
Циклом называют промежуток времени, по истечении которого все параметры, характеризующие работу машины, повторяются (периодическое повторение скоростей, ускорений, нагрузки и т. п.). Движение звеньев машины, таким образом, носит периодический характер. Понятие об установившемся движении вовсе не означает, что ведущее звено машины движется равномерно.
Рассмотрим уравнение движения звена приведения:
.
Из этого уравнения следует, что для равномерного движения (т. е. когда е=0) в любой момент цикла должны соблюдаться условия:
и.

.

т.е. изменения момента должен следовать закону изменения произведения, что на практике не может быть доступно простыми средствами.
Таким образом, даже при.

но ,.
Так, например, кривошип строгального станка, в состав которого входит кулисный механизм, или кривошипного пресса, в состав которого входит кривошипно-ползунный механизм, даже без нагрузки не будут двигаться равномерно.
Равенство моментов на практике соблюдается чрезвычайно редко. Вследствие этих причин установившееся движение машин происходит с периодическим изменением скорости, которая внутри цикла изменяется в приделах:

Большинство машин работает, как правило, в установившемся режиме, который характеризуется тем, что машина за один цикл затрачивает такую работу, которую она получает за цикл от двигателя, т. е. обязательным условием установившегося движения является.
Физическую роль маховика в машине можно представить себе следующим образом. Если в пределах некоторого угла поворота начального звена механизма работа движущих сил больше работы сил сопротивления, то начальное звено вращается ускоренно и кинетическая энергия механизма увеличивается.
При отсутствии маховика весь прирост кинетической энергии распределяется между массами звеньев механизма. Маховик увеличивает общую массу механизма и поэтому при том же увеличении кинетической энергии прирост угловой скорости без маховика будет больше, чем при наличии маховика.
Итак, маховик является аккумулятором кинетической энергии, расходующим ее, когда работа сил сопротивления больше работы сил движущих.
Маховик выполняют в форме сплошного диска или шкива со спицами и массивным ободом и укрепляют на валу машины. Особенно большое значение имеет установка маховика для машин, работающих с резко возрастающей нагрузкой (пресса, дробилки, прокатные станы). В данных машинах накопленная маховиком энергия используется для преодоления повышенных полезных нагрузок без увеличения мощности двигателя.

Определение момента инерции маховика при .
Задача об удержании скорости ведущего звена в заранее заданных пределах может быть решена с помощью постановки на одно из звеньев машины, совершающих вращательное движение, диска с необходимым (расчетным) моментом инерции.
Пусть задано д, щcp, (ц) и.
Последнее означает, что движение всех звеньев связано с движением ведущего звена механизма постоянным передаточным отношением.
Требуется определить такой момент инерции маховика, чтобы скорости ведущего звена не выходили за пределы щmax и щmin, которые определяются по формуле:

В случае, когда эти значения угловой скорости будут соответствовать положениям звена приведения, когда кинетическая энергия механизма будет принимать экстремальные значения, что в общем случае не имеет места при .

Отметим, что случай в известном смысле распространяется и на случай, если. Дело в том, что методах Мерцалова и Гутьяра прежде, чем рассчитать момент инерции маховика, его кинетическая энергия выделяется из кинетической энергии машины и таким образом задача сводится к определению момента инерции маховика для системы с .
Получим уравнение, с помощью которого можно определить JM механизма, удовлетворяющий постоянному условию.

В случае, и дифференциальное уравнение движения машины принимает вид:

.
то, обозначив ,.

будем иметь.
Интегрируя это уравнение на участке углов поворота звена приведения от до, будем иметь:



Так, как полученное равенство справедливо для любых значений угла поворота главного вала, то выберем углы поворота и так, чтобы они соответствовали экстремальным значениям угловых скоростей звена приведения. Пусть соответствует, а -. Тогда представит наибольший перепад кинетической энергии машины за цикл и уравнение (*) запишется так:


По этой формуле может быть определен приведенный момент инерции механизма при заданной нагрузке, щср и д. Как видим, для совершенно равномерного движения звена приведения (д=0) .
Заметим, что вид этой формулы сохраняется и в том случае, если, т. к. из кинетической энергии механизма выделяется кинетическая энергия маховика, у которого и тогда будет отнесено к маховику. Можно так же показать, что при одной и той же нагрузке потеря скорости звена приведения будет тем меньше, чем больше момент инерции звена приведения:


Эта зависимость оправдывает наше утверждение, т. е. чем больше инерционность механизма, тем меньше потери скорости. Заданного значения д добиваются путем постановки на одно из вращающихся звеньев механизма маховика с требуемым приведенным к звену приведения моментом инерции, который вычисляется из условия:

.
где: — приведенный к звену приведения момент инерции маховика;

— сумма приведенных к звену приведения моментов инерции всех звеньев механизма (без маховика);
— расчетный приведенный момент инерции звена приведения, вычисленный по формуле (4.23).
Обычно нагрузка на машину задается в виде графика приведенных моментов сил сопротивления и по этой нагрузке подбирается соответствующий двигатель, момент которого задается в виде графика приведенных к звену приведения движущих сил. Интегрируя эти графики на протяжении одного цикла, получают работу сил движущих и сил сопротивления за цикл (рис. 4.8). Для установившегося движения (Ад) цикла = (Ас) цикла — это является основным условием установившегося движения и служит основанием для определения мощности двигателя.
Затем, вычитая из ординат графика Ад (ц) ординаты графика Ас (ц), получают график избыточных работ или, что одно и тоже, график приращений кинетической энергии машины, по которому и определяют и подставляют в формулу (4.23).
Отметим, что операцию вычитания можно произвести сразу на графике моментов и, минуя при этом график работ, получить график? Т (ц). Это следует из того, что интеграл суммы равен сумме интегралов.



Как видим, и имеют не одинаковые значения в различных положениях механизма. Маховик накапливает кинетическую энергию на участках цикла, где и поэтому скорость звена приведения возрастает. На участках же, где, маховик и другие звенья механизма отдают кинетическую энергию, снижая скорость, и дополняют момент движущих сил до равенства с моментом сил сопротивления за счет инерционного момента сил тормозящихся масс. Таким образом, маховик выполняет роль аккумулятора кинетической энергии, который накапливает и отдает ее в соответствующих положениях механизма, снижая потерю скорости звена приведения.

Из технического задания на проектирование машины обычно бывают известными: производительность машины, механическая характеристика силы сопротивления и тип двигателя.
В подавляющем большинстве случаев в качестве двигателя принимается асинхронный электродвигатель как наиболее простой и дешевый.
По заданной производительности машины рассчитывается средняя угловая скорость главного вала машины, а затем определяется работа силы сопротивления за цикл и мощность двигателя:

После того, как проведен энергетический расчет машины и определена мощность электродвигателя, производится расчет момента инерции маховика. Для привода проектируемой машины по каталогу можно выбрать электродвигатели различных типов с одной и той же мощностью. Например, для привода машин с неравномерной и пиковой нагрузками применяются электродвигатели типов АО и АОС. Покажем, как выбор того или иного типа электродвигателя влияет на величину коэффициента неравномерности движения машины, а следовательно на размеры ее маховика.
Исходя из данных механической характеристики асинхронного электродвигателя, можно установить математическую связь между номинальным скольжением ротора электродвигателя и коэффициентом неравномерности движения машины.
С достаточной для практики точностью можно принять, что устойчивая часть механической характеристики асинхронных двигателей прямолинейна, тогда из подобия треугольников имеем:

где: — критический момент, при котором двигатель переходит на неустойчивую часть механической характеристики;

— номинальный момент на валу электродвигателя;

— синхронная угловая скорость ротора электродвигателя;

— номинальная угловая скорость электродвигателя;

— критическая угловая скорость ротора электродвигателя;

— критическое скольжение ротора электродвигателя, определяемое равенством:
.

где — номинальное скольжение ротора электродвигателя, определяемое равенством:

лкоэффициент опрокидывания.
Из таблицы технических данных асинхронных электродвигателей с короткозамкнутым ротором общего назначения следует, что для двигателей типа АО (электродвигатели в закрытом обдуваемом исполнении) с синхронным числом оборотов ротора, равным 1000 об/мин, коэффициент опрокидывания колеблется в пределах л=1,8…2,2, а для двигателей АОС (электродвигатели с повышенным скольжением в закрытом обдуваемом исполнении) при том же значении синхронных чисел оборотов коэффициент опрокидывания лежит в пределах: л=2,2…2,6.

В соответствии с этим рассмотрим два случая, предварительно заметив, что в качестве средней угловой скорости принята номинальная угловая скорость ротора электродвигателя и предельные значения угловых скоростей ротора и поэтому должны симметрично располагаться по отношению к его номинальной угловой скорости.


Случай 1. Этот случай соответствует, когда коэффициент, тогда, а максимальное значение угловой скорости принимаем равным синхронной угловой скорости. Исходя из этих соображений, находим предельные угловые скорости ротора:

.
Далее определяем коэффициент неравномерности движения машины:



Случай 2. Этот случай соответствует коэффициенту опрокидывания л<2, тогда, а минимальное значение угловой скорости принимаем равной критической угловой скорости ротора. Как и прежде, находим предельные значения угловых скоростей ротора:

Далее определяем коэффициент неравномерности движения машины:


Полученные в обоих случаях д являются одновременно и критическими значениями.
В качестве примера возьмем два электродвигателя одинаковой мощности и с одинаковыми синхронными числами оборотов ротора, но разных типов: двигатель типа АО мощностью 40 квт и синхронным числом оборотов ротора, равным 1000 об/мин и двигатель типа АОС с теми же показателями. Для обоих двигателей коэффициент опрокидывания, поэтому коэффициент неравномерности движения вычисляем по формуле (4.23). Для двигателя типа АО получим д=0,0204; а для типа двигателя АОС д=0,087.
Рассматривая эти результаты, видим, что при всех прочих равных условиях момент инерции маховика, работающего с двигателем типа АО должен быть в 4,3 раза больше момента инерции маховика, работающего с двигателем типа АОС.

Надо иметь в виду, что двигатель никогда не доведет угловую скорость маховика до значения, соответствующего синхронной скорости ротора, т. к. в машине всегда присутствуют вредные сопротивления (трение, гидравлические сопротивления смазки, сопротивление воздуха и т. п.). В силу этих причин и при определении д следует всегда вводить на это некоторую поправку. Кроме того, нельзя доводить значение щmin до критической скорости и поэтому должно иметь место следующее соотношение: щкр<�щmin.
Определение угловой скорости главного звена при заданном приведенном моменте.
Пусть для машины задан закон изменения приведенного момента Согласно закону сил изменение кинетической энергии механизма равно работе внешних сил.
гдеЕ0 — кинетическая энергия механизма в начальный момент,.
A (ц) — работа внешних сил, произведенная внешними силами движущими и силами сопротивления за время поворота начального звена на угол ц.
После построения диаграммы избыточного момента нетрудно построить диаграмму изменения кинетической энергии.

Интегральную кривую можно построить методом графического интегрирования.


Работа есть площадь между кривой и осью .
Работа есть площадь между кривой и осью :
E2-E1=Ag-Ac
Для нахождения реальной угловой скорости главного звена используем уравнение 8.


Из уравнений (4.26) и (4.27).





Такое допущение можно сделать, так как — очень мало.
определить дополнительный момент инерции, который необходимо добавить к механизму с целью получения механизма с лучшим коэффициентом неравномерности.
Под углами проводим лучи касательно к кривой. В точке пересечения этих лучей получим новую систему координат с новым значением .
— приведенный момент инерции маховика.
Трудность решения задачи о маховике в этом случае заключается в том, что положения механизма с экстремальными значениями кинетической энергии и угловых скоростей в общем случае не совпадают и, следовательно, нет основания полагать, что наибольшему перепаду энергии, соответствуют положения звена приведения, где имеют место щmax и щmin, тогда, как это было при.


Тогда, представляя приведенный момент инерции состоящим из постоянной и переменной частей, запишем:
.
где — приведенный момент инерции механизма;

— приведенный момент инерции маховика;
— приведенный момент инерции звеньев, движение которых связано с движением звена приведения переменным передаточным отношением (т. е. звеньев, направления движений которых изменяются).
Заметим, что кинетическая энергия маховика будет иметь экстремальные значения в тех же положениях звена приведения, где будут иметь место экстремальные значения его угловой скорости;

(где индекс М означает принадлежность к маховику).
Поэтому, если из кинетической энергии машины выделить кинетическую энергию маховика ТМ, то можно определить наибольший перепад его энергии, а затем определить и его необходимый момент инерции тем же методом, как это делалось для машин с .
Интегральные методы расчета маховика, основанные на решении уравнения движения машины, представленного в виде закона изменения кинетической энергии, отличаются друг от друга способами определения наибольшего перепада энергии маховика .
Здесь существуют принципиально точные методы расчета без использования какихлибо упрощенных предположений и приближенные методы, использующие эти предположения.
Предложен в 1914 году. Основан на выделении из кинетической энергии машины кинетической энергии маховика, как имеющего постоянный приведенный момент инерции .

Пусть задана нагрузка на машину в виде зависимостей и. Тогда, интегрируя уравнение движения, получим:

Представляя Т состоящей из энергии ТМ и Тзв звеньев будем иметь:
;
выделяя из кинетической энергии механизма энергию ТМ, получим:
.
Представим теперь ТМ таким образом:; (за То можно принять любое значение кинетической энергии и вести от него отсчет приращений? ТМ).
Для удобства примем То, равным его значению в выражении (4.33), т. е. отсчет значений? ТМ будем производить от той же оси абсцисс, что и отсчет приращений кинетической энергии машины, тогда:
или.
Таким образом, чтобы построить график? ТМ(ц), надо иметь график? Т (ц) и кинетическую энергию звеньев Тзв(ц).

.
Метод Гутьяра Б. М. (точный метод) Этот метод был предложен в 1939 году. Ход рассуждений, касающийся Мерцалова, применим и в методе Гутьяра, однако из графика? Т (ц) будем вычитать энергию звеньев, вычисленную по формуле:

тогда.
.
Очевидно, что в этом случае мы вычитаем завышенные по абсолютной величине значения ординат графика Тзв (ц), т. к. из? Т (ц) мы вычитаем величины больше чем следует по отношению к истинному значению ординат, которые получились бы, если бы мы вычитали:


где щ — истинное значение угловой скорости звена приведения.
Определим на сколько завышены по абсолютной величине ординаты графика? ТМ (ц).
Нам следовало вычитать:

.

следовательно, в каждом положении нами внесена ошибка.


выносится за скобки т. к. это приведенный момент инерции звеньев в одном и том же положении.
Однако в положении звена приведения, где, ошибка ?=0. Значит, в этом положении мы имеем истинное значение? ТМ. Этому положению соответствует:
.
.
Примечание 2: Учитывая пункт 1 примечания можно строить только одну кривую, например, ТЗВ(min)(ц) и вносить соответствующую поправку в точке Аґ, т. к. экстремальные значения для обеих кривых будут лежать на одной и той же ординате, т. е. точка Аґ должна быть перенесена в точку А, соответствующую истинному минимуму энергии маховика.

Таким образом, вместо построения кривой на всем интервале, равном циклу, следует определить точку, А по выражению:

.
где цi — угол, определяющий положение звена приведения, в котором кинетическая энергия будет максимальной.