Кинетическая энергия.
Анализ физических явлений в механике
Про тела, которые могут совершать работу, говорят, что они обладают энергией. Энергией называют скалярную физическую величину, показывающую, какую работу может совершить тело. Энергия равна той максимальной работе, которую тело может совершить в данных условиях. Механическая работа является мерой изменения энергии в различных процессах. Поэтому энергию и работу выражают в одних и тех же единицах… Читать ещё >
Кинетическая энергия. Анализ физических явлений в механике (реферат, курсовая, диплом, контрольная)
Про тела, которые могут совершать работу, говорят, что они обладают энергией. Энергией называют скалярную физическую величину, показывающую, какую работу может совершить тело. Энергия равна той максимальной работе, которую тело может совершить в данных условиях. Механическая работа является мерой изменения энергии в различных процессах. Поэтому энергию и работу выражают в одних и тех же единицах (в СИ — в джоулях). В более общем смысле энергия — это единая мера разных форм движения материи, а также мера перехода движения материи из одной формы в другую. Для характеристики конкретных форм движения материи используют понятия о соответствующих видах энергии: механической, внутренней, электромагнитной и т. д. Механическая энергия является характеристикой движения и взаимодействия тел. Она зависит от скоростей и взаимного расположения тел.
Кинетическая энергия Рассмотрим случай, когда тело массой m под действием постоянной силы (F=const) движется прямолинейно равноускоренно (а=const). Определим работу силы, приложенной к телу, при изменении модуля скорости этого тела от v1 до v2.
Как было отмечено в § 17, работу постоянной силы вычисляют по формуле А=Fscosa. Так как в рассматриваемом нами случае направление силы F и перемещения s совпадают, то cosa=1 и А=Fs. По второму закону Ньютона F=ma. В § 2 было показано, что для прямолинейного равноускоренного движения справедлива формула.
v2=vo2+2as.
Из этой формулы при vо=v1 и v=v2 Следует, что.
s=(v22-v12)/2a.
Подставив значения F и s в формулу работы, получим А=mv22/2-mv12/2 (3.12).
Из последней формулы видно, что работа силы, приложенной к телу, при изменении скорости этого тела равна разности двух значений некоторой величины mv22/2.
Выше отмечалось, что механическая работа есть мера изменения энергии. Следовательно, в правой части формулы (3.12) стоит разность двух значений энергии данного тела. Это значит, что величина mv22/2 представляет собой энергию, обусловленную движением тела. Эту энергию называют кинетической. Она обозначается Wк. Следовательно,.
Wк=mv22/2. (3.13).
С учетом (3.13) формулу (3,12) можно записать в виде А=Wk2-Wk1=DWk, (3.14).
т.е. работа, совершаемая силой при изменении скорости тела, равна изменению кинетической энергии этого тела.
Когда направление силы совпадает с направлением перемещения тела, работа силы положительна (т.е. A>0). Из формулы (3.14) видно, что в этом случае Wk2-Wk1>0, т. е. Wk2>Wk1. Следовательно, когда сила совершает положительную работу, кинетическая энергия тела увеличивается. Когда же направление силы противоположно направлению перемещения, то A<0 и Wk2-Wk1<0, т. е. Wk2k1. Следовательно, когда сила совершает отрицательную работу, кинетическая энергия тела уменьшается.
33. Потенциальная энергия.
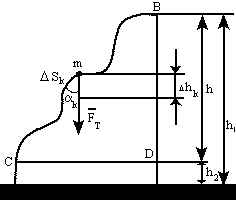
Определим работу, совершаемую силой тяжести Fт при переносе материальной точки массой m по криволинейной траектории ВС из одной точки В поля тяготения Земли в другую точку С (рис 31). Для этого разобьем траекторию движения тела на сколь угодно малые участки Dsk, каждый из которых можно считать прямолинейным.
На произвольно выбранном таком участке сила тяжести Fт составляет с перемещением Dsk угол ak. Поэтому на данном участке работа силы тяжести.
DAk=Fт· Dsk·cos (ak). (3.15).
Спроецируем участок Dsk на вертикаль BD. Его проекция.
Dhk=Dsk· cos (ak). (3.16).
Из (3.15) и (3.16) имеем DAk=Fт· Dhk. Очевидно, что работа ABC силы тяжести Fт на всем пути ВС равна сумме элементарных работ Dhk на всех участках Dsk этого пути:
ABC=Fт(h1-h2)=mgh1-mgh2 (3.17).
Из последней формулы видно, что работа силы тяжести при переносе материальной точки массой m в поле тяготения Земли равна разности двух значений некоторой величины mgh. Поскольку работа есть мера изменения энергии, то в правой части формулы (3.17) стоит разность двух значений энергии этого тела. Это значит, что величина mgh представляет собой энергию, обусловленную положением тела в поле тяготения Земли.
Энергию, обусловленную взаимным расположением взаимодействующих между собой тел (или частей одного тела), называют потенциальной и обозначают Wп. Следовательно, для тела, находящегося в поле тяготения Земли,.
Wп=mgh. (3.18).
С учетом (3.18) формулу (3.17) можно записать в виде.
ABC=Wп1-Wп2=-(Wп2-Wп1)=-DWп (3.19).
т. е. работа силы тяжести равна изменению потенциальной энер-гии тела, взятому с противоположным знаком.
Из рис. видно, что работа ABD, совершаемая силой тяжести при перемещении материальной точки массой m из точки B в точку D по вертикали ВD, составляет ABC=mgh1-mgh2. Следовательно, ABD=ABC. Таким образом, работа силы тяжести не зависит от траектории движения тела, а определяется лишь положением в поле тяготения Земли начальной и конечной точек перемещения тела.
В § 12 отмечалось, что силы, работа которых не зависит от траектории движения тела, называют консервативными, а поле таких сил называется потенциальным. Сила тяжести является консервативной, а поле тяготения — потенциальным. Из формулы (3.19) следует, что работа консервативных сил равна изменению потенциальной энергии тела, взятому с противоположным знаком.
Следует отметить, что тела имеют потенциальную энергии не только вследствие их притяжения к Земле. В § 10 было показано, что в результате упругой деформации тело тоже приобретает потенциальную энергию. Если, например, сжимается или растягивается упругая пружина, то ее потенциальная энергия вычисляется по формуле Wп=kх2/2, где k — жесткость пружины, x — ее удлинение, т. е. смещение точки приложения силы упругости.
Работа силы упругости определяется по формуле.
A=Wп1-Wп2= kх12/2- kх22/2=-DWп (3.20).
Сумму кинетической и потенциальной энергии тела называют полной механической энергией этого тела и обозначают W.
W=Wп+Wk (3.21).