Моделирование систем с одной степенью свободы
Заменяются конечными разностями, а бесконечно малые приращения — малыми, но конечными приращениями Сначала, исходя из параметров системы, ее координаты и скорости в момент времени, рассчитывается ее координата и скорость в следующий момент. Сила тока. При этом реализуется электромеханическая аналогия «сила-напряжение». В параллельном колебательном контуре, состоящем из резистора, конденсатора… Читать ещё >
Моделирование систем с одной степенью свободы (реферат, курсовая, диплом, контрольная)
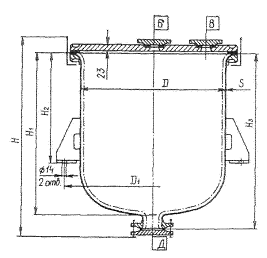
1. Задача. Имеется физическая система с одной степенью свободы, состоящая из инерционного элемента массой, упругого элемента жесткостью и диссипативного элемента с коэффициентом сопротивления. Определить отклик системы, а также ее первую и вторую производные на внешнее воздействие.
если известны начальные условия.
2. Теория. Из второго закона Ньютона следует линейное неоднородное дифференциальное уравнение второго порядка:
Процессы, происходящие в последовательном колебательном контуре, состоящем из последовательно соединенных резистора, конденсатора и катушки индуктивности, на который подано напряжение, описываются уравнением.
где — заряд, проходящий по цепи,.
— сила тока. При этом реализуется электромеханическая аналогия «сила-напряжение». В параллельном колебательном контуре, состоящем из резистора, конденсатора и катушки индуктивности, соединенных параллельно и подключенных к источнику тока.
.
происходят процессы, описываемые уравнением:
где — напряжение на резисторе, емкости и индуктивности, — производная силы тока по времени. При этом реализуется электромеханическая аналогия «сила-ток» .
Механические величины. | Аналогия сила-напряжение. | Аналогия сила-ток. |
Сила. | Напряжение. | Ток. |
Смещение. | Заряд. | Напряжение. |
Скорость. | Сила тока. | Производная напряжения. |
Масса. | Индуктивность. | Емкость. |
Жесткость. | Величина обратная емкости. | Величина обратная индуктивности. |
Коэффициент сопротивления. | Сопротивление. | Сопротивление. |
Итак, неоднородное диффуравнение второго порядка описывает широкий класс задач, изучаемых в школьном и вузовском курсе физики: движение связанного с пружиной тела в вязкой среде под действием произвольной силы, протекание тока через последовательно или параллельно соединенные резистор, конденсатор и катушку индуктивности, подключенные к источнику ЭДС или источнику тока .
Характер движения механической системы зависит от действующей на нее внешней силы. При этом могут быть рассмотрены следующие ситуации:
- · внешняя сила отсутствует;
- · внешняя сила постоянна;
- · внешняя сила изменяется по гармоническому закону;
- · внешняя сила изменяется по произвольному периодическому закону;
- · внешняя сила изменяется по произвольному непериодическому закону.
Кроме того, физические явления, возникающие в системе, зависят от ее параметров и начальных условий, к которым относятся координата и скорость в начальный момент времени.
3. Алгоритм. Дифференциальное уравнение второго порядка может быть решено методом конечных разностей Эйлера. Он состоит в том, что бесконечно малые приращения функции и ее первых двух производных.
заменяются конечными разностями, а бесконечно малые приращения — малыми, но конечными приращениями Сначала, исходя из параметров системы, ее координаты и скорости в момент времени, рассчитывается ее координата и скорость в следующий момент.
Затем это состояние рассматривается как исходное, и процедура расчета повторяется для момента времени и так далее. Одновременно с вычислениями строятся графики.
Рассмотрим алгоритм численного решения уравнения.
1. Задают параметры физической системы зависимость внешнего воздействия от времени, а также начальные условия и шаг по времени.
2. Начало цикла по Дают приращение по времени: переменной присваивают значение.
3. Определяют ускорение, скорость и координату тела в момент.
4. Результаты вычислений выводят на экран в числовом виде либо строят соответствующие точки на координатной плоскости.
- 5. Возвращение к операции 2. Если цикл по закончился, — выход из цикла.
- 4. Компьютерная программа. При запуске программа рисует графики зависимостей координаты
проекции скорости.
и проекции ускорения.
.
Некоторые строчки программы заключены в скобки «(*» и «*)». Убрав скобки и активизировав соответствующие операторы, можно промоделировать различные явления.
program PROGRAMMA2;
uses dos, crt, graph;
Const Fm=10;w=5;m=2;r=0;k=0;
Mx=20; Mv=40; Ma=8; Mf=2; Mt=100;
dt=0.6;
Var x, v, a, F, t: Real;
j, xx, vv, aa, FF, tt, Gd, Gm: Integer;
BEGIN.
Gd:= Detect;
InitGraph (Gd, Gm, 'c:pgi');
if GraphResultgrOk then Halt (1);
t:=0; v:=0; x:=-3;
line (30,300,650,300);
line (31,500,31,10);
OutTextXY (50,20,'X, V, A');
Repeat.
begin {Задание функции F=F (t)}.
t:=t+dt; (* F:=Fm*sin (w*t); *).
(*If sin (w*t)<0 then F:=0;
If sin (w*t)>0 then F:=Fm;*).
F:=0; If t<1 then F:= Fm;
If t>3 then F:=-Fm;
a:=(F-r*v-k*x)/m; x:=x+v*dt; v:=v+a*dt; tt:=round (t*Mt);
xx:=round (x*Mx); vv:=round (v*Mv); aa:=round (a*Ma); FF:=round (F*Mf);
circle (30+tt, 300-xx, 1); circle (30+tt, 300-vv, 1); circle (30+tt, 300-aa, 2);
end;
until KeyPressed;
CloseGraph;
END.
- 5. Задания для студентов.
- 1. На точку массы действует скачкообразно изменяющаяся сила
Если Если Если.
Исследуйте движение точки, проанализируйте получившиеся графики зависимостей.
2. Промоделируйте движение материальной точки, движущейся в вязкой среде под действием постоянной силы, направленной вдоль оси.
:
при начальных условиях.
Проанализируйте получающиеся графики. Докажите, что время подъема камня, брошенного вертикально вверх, меньше времени спуска.
- 3. Создайте модель переходного процесса в цепи, содержащей резистор и катушку индуктивности подключенные к источнику постоянного напряжения, при условии, что. Исследуйте аналогичный переходный процесс в цепи, содержащей последовательно соединенные резистор и конденсатор.
- 4. Изучите движение колебательной системы в случае слабого затухания, когда
.
Убедитесь в том, что ускорение изменяется в противофазе с координатой, а скорость опережает координату на причем амплитуды колебаний уменьшаются по экспоненте. Проведите серию вычислительных экспериментов при различных начальных условиях системы.
5. Промоделируйте движение осциллятора в случае сильного затухания при.
Убедитесь, что в этом случае движение будет апериодическим.
6. Исследуйте затухающие колебания тела, связанного с горизонтально расположенными пружинами и скользящего по поверхности стола, считая, что максимальная сила трения покоя равна силе трения скольжения.
7. Промоделируйте работу сглаживающегофильтра при подаче на него пульсирующего напряжения, получающегося в результате однополупериодного выпрямления. Для этого необходимо задать следующие параметры колебательной системы кг, Нс/м, Н/м, рад и закон изменения вынуждающей силы:
Если.
Если Где.
— период колебаний. Убедитесь в том, что с ростом индуктивности уменьшается коэффициент пульсаций тока и напряжения на резисторе. Изучите зависимость амплитуды пульсаций от индуктивности, сопротивления нагрузки и частоты импульсов.
8. Изучите работу интегрирующей цепи, состоящей из последовательно соединенных резистора и конденсатора, с которого снимается выходное напряжение. Видно, что при подаче на цепь прямоугольных импульсов.
Если Если.

заряд конденсатора, а значит и напряжение на нем, возрастает пропорционально интегралу от входного напряжения.
Так как в программе осуществляется деление на (аналог индуктивности), то значение этого параметра должно быть очень малым, но не равным нулю.
9. Промоделируйте движение тела в вязкой среде (), на которое в момент времени начинает действовать внешняя гармоническая сила.
Эта ситуация соответствует переходному процессу, происходящему при подключении активно-индуктивной нагрузки к источнику переменного напряжения. При переходный ток стремится к принужденному току, изменяющемуся с той же частотой, что и приложенная ЭДС и отстающему от нее на некоторую фазу.
10. Создайте программу, моделирующую процессы, происходящие в колебательной системе в случае, если на нее действует периодически изменяющаяся сила, частота которой пропорциональна времени:
.
где Значения и подберите так, чтобы резонансная частота колебательной системы находилась в середине рабочего диапазона частот. На рисунке показан получающийся график зависимости.
.
Так как частота колебаний прямопропорциональна времени, то огибающая графика является амплитудо-частотной характеристикой колебательной системы, и называется резонансной кривой.