Равномерное вращательное движение жесткой плиты
Принимая гипотезу равномерного вращения жесткой плиты с мобильными пунктами, выполним по МНК оценивание следующих параметров: отметок мобильных пунктов и скорости вращения плиты с их точностными характеристиками; как функции указанных величин, получим оценки смещений и скоростей движений пунктов с их точностными характеристиками. Принимаем гипотезу о равномерном вращательном движении жесткой… Читать ещё >
Равномерное вращательное движение жесткой плиты (реферат, курсовая, диплом, контрольная)
Принимаем гипотезу о равномерном вращательном движении жесткой плиты, на которой располагается наш локальный участок земной поверхности. При этом пункт М1 располагается на расстоянии 0,5 км от оси вращения и опускается, а пункты М2 и М3 располагаются на одной прямой, параллельной оси вращения плиты на расстоянии 0,95 км от нее.
Схему расположения мобильных пунктов на плите земной коры можно представить в следующем виде (см. рис. 2).
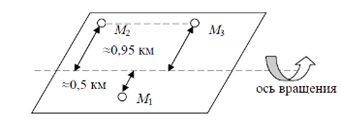
Рис. 2. Схема расположения мобильных пунктов на плите земной коры
Принимая гипотезу равномерного вращения жесткой плиты с мобильными пунктами, выполним по МНК оценивание следующих параметров: отметок мобильных пунктов и скорости вращения плиты с их точностными характеристиками; как функции указанных величин, получим оценки смещений и скоростей движений пунктов с их точностными характеристиками.
Для этого выполним следующее:
введем вектор параметров состояния объекта (локального участка земной поверхности), компонентами которого будут отметки мобильных пунктов на первую эпоху и угловая скорость вращения жесткой плиты;
получим начальную оценку (приближенные значения параметров) вектора состояния;
составим параметрические уравнения связи для измеренных превышений;
составим уравнения поправок для измеренных превышений двух эпох, для чего вычислим коэффициенты и свободные члены уравнений поправок, а также веса измеренных превышений;
решим полученные уравнения поправок по МНК;
получим оценку вектора параметров состояния объекта и средние квадратические ошибки параметров;
определим смещения и скорости движений мобильных пунктов.
При уравнивании результатов измерений параметрическим способом по МНК [2] в качестве параметров принимают такие величины, функциями которых могут быть выражены любые элементы геодезической сети (в нашем случае это могут быть отметки мобильных пунктов, непосредственно измерения — превышения, как в первую, так и во вторую эпохи, смещения мобильных пунктов, скорости смещений и т. п.). Исходя из этого, выберем в качестве параметров отметки мобильных пунктов в первую эпоху и угловую скорость вращения плиты. Тогда вектор параметров примет следующий вид:
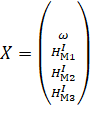
(6).
Где щ — угловая скорость вращения плиты;

— отметки мобильных пунктов в первую эпоху.
Тогда математическая модель равномерного вращательного движения жесткой плиты, на которой расположены наши мобильные пункты, может быть представлена в виде следующей системы уравнений, которые связывают отметки в первую и вторую эпохи:

(7).
Целью уравнивания результатов измерений по МНК является исключение ошибок измерений. Для этого необходимо решить систему уравнений поправок следующего вида:
AДX + L = V (8).
Где A — матрица коэффициентов уравнений поправок, прямоугольная, число строк равно числу измерений n, а число столбцов равно числу параметров t;
Д X — вектор поправок в приближенные значения параметров;
L — вектор свободных членов уравнений поправок;
V — вектор поправок в измеренные величины.
Для составления уравнений поправок вида (8) необходимо определить матрицу коэффициентов, А и вычислить вектор L, для чего необходимо составить параметрические уравнения связи, которые связывают измеренные превышения с параметрами щ,.

Тогда для измерений первой эпохи параметрические уравнения связи будут иметь вид:




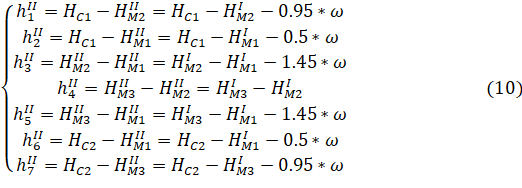
С учетом уравнений (7) параметрические уравнения связи для измерений второй эпохи будут иметь вид:


Коэффициенты уравнений поправок (элементы матрицы А) представляют собой частные производные от параметрических уравнений связи по всем параметрам (щ,) Исходя из этого получаем матрицу, А (таблицу 5).
Таблица 5 — Матрица коэффициентов уравнений поправок (А).
 щ. | |||||
— 1. | |||||
— 1. | |||||
— 1. | |||||
— 1. | |||||
— 1. | |||||
— 1. | |||||
— 1. | |||||
— 0.95. | — 1. | ||||
0.5. | — 1. | ||||
1.45. | — 1. | ||||
— 1. | |||||
1.45. | — 1. | ||||
0.5. | — 1. | ||||
                 — 0.95. | — 1. | ||||
Для получения вектора свободных членов уравнений поправок L необходимо вычислить приближенные значения измеренных превышений, для чего сначала нужно получить приближенные значения вектора параметров Х и подставить их в уравнения (10) и (11).
Получим приближенные значения вектора параметров Х: для этого используем значения отметок стабильных пунктов С1 и С2, измеренные превышения h1, h2, h7 и расстояние R от мобильного пункта М1 до оси вращения плиты и получаем:
(11).



Далее определим свободные члены уравнений поправок l по формуле 12:
(12).
(13).
Где l — свободный член уравнения поправок для i-го измеренного превышения;
hєi — приближенное значение превышения, полученное по формулам (9), (10).
Для I эпохи приближенные значения измеренных превышений вычисляются следующим образом:
№. | h. | L. | |
19,9211. | 0,0000. | ||
33,8996. | 0,0000. | ||
13,9785. | — 0,0001. | ||
15,3803. | — 0,0449. | ||
29,3588. | — 0,0310. | ||
52,5996. | — 0,0592. | ||
23,2408. | 0,0000. | ||
19,9211. | 0,0934. | ||
33,8996. | — 0,0573. | ||
14,1157. | — 0,0020. | ||
15,3803. | — 0,0403. | ||
29,4960. | — 0,0447. | ||
52,5996. | — 0,0994. | ||
23,2408. | 0,0791. | ||
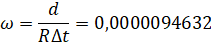
Теперь необходимо вычислить матрицу весов измеренных превышений Р.
(14).
Где Si - длина хода в км;
Рi - вес измеренного превышения, Веса измеренных превышений имеют следующие значения:
Р1 = Р8 = 0,2381;
Р2 = Р9 = 0,3125;
Р3 = Р10 = 0,5000;
Р4 = Р11 = 0,3571;
Р5 = Р12 = 0,5000;
Р6 = Р13 = 0,3333;
Р7 = Р14 = 0,2778.
Решение полученных уравнений поправок выполняется в программе Parmo, предназначенной для решения уравнений поправок параметрическим способом по методу наименьших квадратов.
В итоге обработки программа выдает поправки в приближенные значения параметров и их средние квадратические ошибки:
  0,025. | 0,021. | |
— 0,022. | 0,018. | |
— 0,020. | 0,023. | |
0,013. | 0,022. | |
СКО единицы веса Мu=0.024.
Уравненные отметки мобильных пунктов и угловой скорости находятся по формулам:
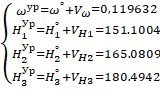
(15).
Вектор поправок в измеренные превышения и Уравненные значения превышений приведены в таблице:
№. | |||
  | 0,020. | 19,9411. | |
0,022. | 33,9216. | ||
0,002. | 13,9806. | ||
— 0,012. | 15,4132. | ||
0,004. | 29,3938. | ||
— 0,037. | 52,6218. | ||
— 0,013. | 23,2278. | ||
№. | |||
0,089. | 20,0101. | ||
— 0,023. | 33,8766. | ||
0,036. | 14,1517. | ||
— 0,007. | 15,3733. | ||
0,026. | 29,5220. | ||
— 0,065. | 52,5346. | ||
0,042. | 23,2828. | ||
Контроль:
