Параметры стойки рабочего органа многофункционального орудия
Рисунок 6 Схема экспериментальной установки для определения тягового усилия рабочего органа 1 — система навески; 2 — рама; 3 — система регулировки глубины обработки; 4 — опорное колесо; 5 — консоль; 6 — динамометр; 7 — фотокамера; 8 — шарнирно закрепленная на раме пластина; 9 — стойка; 10 — накладка; 11 — кронштейны; 12 — долото; 13 — полулапа; 14 — ворошитель. Проведены экспериментальные… Читать ещё >
Параметры стойки рабочего органа многофункционального орудия (реферат, курсовая, диплом, контрольная)
Представлены теоретические и экспериментальные исследования параметров стойки многофункционального рабочего органа почвообрабатывающего орудия для безотвальной обработки почвы
Ключевые слова: ОБРАБОТКА ПОЧВЫ, СТОЙКА, РАДИУС ИЗГИБА, УГОЛ ЗАОСТРЕНИЯ, ЭКСПЕРИМЕНТАЛЬНАЯ УСТАНОВКА, ЭКСПЕРИМЕНТ, ОПТИМАЛЬНЫЕ ПАРАМЕТРЫ Обработка почвы в междурядьях сада требует больших затрат энергии. Одним из перспективных направлений развития АПК, определенных правительством России, является снижение энергоемкости процессов сельхозпроизводства. Поэтому проблема снижения тягового сопротивления почвообрабатывающих орудий является актуальной. Наиболее рациональной системой содержания почвы является безотвальная система [2], обеспечивающая снижение энергоемкости процесса ее обработки. В общем случае если параметры рабочего органа оптимизированы, то одним из направлений снижения энергоёмкости является оптимизация параметров стойки, которая, взаимодействуя с почвой, оказывает сопротивление перемещению рабочего органа [1].
Для реализации этого направления конструкция стойки рабочего органа многофункционального орудия для безотвальной обработки почвы должна быть изготовлена изогнутой в боковом сечении и заточена в поперечном сечении. Общий вид рабочего органа представлен на рисунке 1.
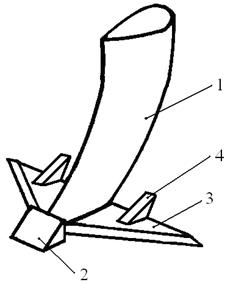
Рисунок 1 Общий вид рабочего органа орудия для сплошной обработки почвы в междурядьях сада 1 — стойка; 2 — долото; 3 — полулапа; 4 — ворошитель.
Продольная составляющая силы сопротивления стойки определится из выражения:
(1).
где — тяговое сопротивление стойки;
— сопротивление, зависящее от формы поперечного сечения стойки;
— сопротивление, зависящее от формы продольного сечения стойки.
Тяговое сопротивление стойки в поперечном сечении складывается из следующих составляющих (рисунок 2):
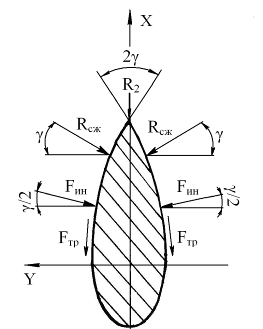
Рисунок 2 Схема сил, действующих в поперечном сечении стойки.

=++, (2).
где — сила сжатия почвенного пласта боковыми гранями лобовой поверхности стойки, Н;
— сила трения, возникающая при перемещении почвы вдоль уплотненного ядра и боковых граней лобовой поверхности стойки;
— сила инерции от почвенных частиц, поступающих на боковые грани лобовой поверхности стойки, Н.
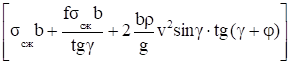
После преобразований получили следующее выражение для Р1с:

Р1с= усжbLc+ Lc+Lc (3).

где усж — напряжение сжатия почвы, Н/м;
b — толщина стойки, м;
Lc — длина рабочего участка стойки, м;
f — коэффициент трения почвы о сталь;
г — угол заточки, град;
с — плотность почвы, кг/м3;
v — скорость движения агрегата, м/с;
ц — угол трения почвы о сталь.
Сопротивление, зависящее от формы продольного сечения стойки определим из выражения (рисунок 3):

R2=, (4).
где R2 — равнодействующая сил, действующих в продольной плоскости, Н;
N — реакция стойки на пласт почвы, Н;
Fтр — сила трения почвы по стали, Н.
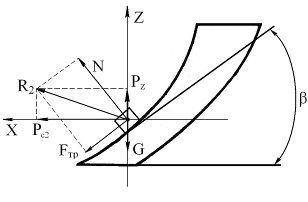
Рисунок 3 Схема сил, действующих в продольной плоскости.
N=G•cosв, (5).
где G — вес пласта почвы, Н.
G=а•b•Lc•с•g, (6).
где, а — глубина обработки почвы, м;
Lc — длина рабочего участка стойки, м;
с — плотность почвы, кг/м3;
g — ускорение свободного падения, м/с2
Fтр=fGsinв (7).
Горизонтальная составляющая тягового сопротивления в продольной плоскости Р2с равна Рс2 =R2cos (90−2в) (8).
Длина рабочего участка стойки равна (рисунок 4).
Lс=(90-в-arcsin), (9).

где R — радиус дуги окружности, образующей рабочую поверхность стойки, м;
в — угол крошения, град;
а — глубина обработки, м;
lд — длина долота, м.
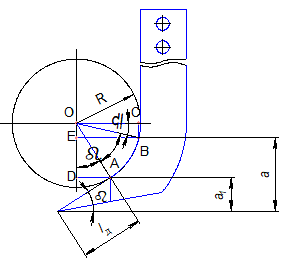
Рисунок 4 Схема к определению рабочей длины стойки.
С учетом (4) — (7) и (9) выражение (8) примет вид:

Рс2=Ч Чcos (90−2в) (10).
Тогда полное сопротивление стойки составит:
Рс=(90-в-arcsin)+.

+Ч Чcos (90−2в) (11).
В работе [2] предложено уравнение продольной составляющей Рх для рабочего органа многофункционального почвообрабатывающего орудия, поступательно движущегося с постоянной скоростью:
Рх = Рд + 2•Рл + Рс+ 2•Рв, (12).
Используя это выражение в расширенном виде и подставив вместо Рс выражение (11), получим аналитическую зависимость для расчета продольной составляющей силы сопротивления почвы движению многофункционального рабочего органа с новой стойкой.
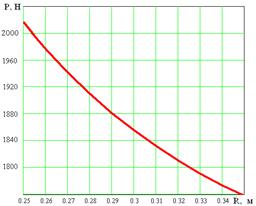
Решение аналитического уравнения относительно интервалов варьирования определяемых параметров (R и 2г) дает наглядное представление об изменении горизонтальной составляющей силы сопротивления почвы в зависимости от геометрических параметров стойки рабочего органа (рисунок 5).
Анализ результатов, полученных аналитически с учетом физико-механических свойств бурой лесной почвы, позволяет сделать следующие выводы:
- 1. Увеличение величины угла заострения стойки в пределах интервала варьирования 40…60° приводит к увеличению силы сопротивления с 1610Н до 1930 Н, т. е. возрастает на 19,8%.
- 2. Увеличение радиуса изгиба стойки в пределах интервала варьирования 0,25…0,35 м снижает силу сопротивления, действующую на стойку универсального рабочего органа при обработке почвы на 14,5%.
- 3. Горизонтальная составляющая силы сопротивления почвы, определенная аналитически, составляет 1800Н при скорости перемещения v=1,94м/с и глубине обработки 0,2 м.
- а)
б).
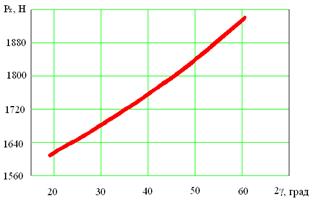
Рисунок 5 Аналитическая зависимость сопротивления почвы от параметров стойки а) — радиуса изгиба, б) — угла заострения.
почва стойка многофункциональный почвообрабатывающий Для проведения полевых исследований была изготовлена специальная установка, с помощью которой измеряли величину горизонтальной составляющей силы сопротивления рабочего органа при обработке почвы.
Установка для проведения опыта представляет собой трехбрусную раму 1 (рисунок 6) с системой навески 2, механизмом регулирования глубины обработки почвы 3 и опорным колесом 4. К брусу рамы приварена консоль 5 для крепления посредством шарнира одного конца динамометра 6. Сзади к раме на шарнире установлена пластина 7, к которой с помощью кронштейнов и болтов крепится стойка 8. На стойке смонтирована накладка 9 посредством кронштейнов 10, долото 11, полулапы 12 и ворошители 13. К внешнему брусу рамы в специальной рамке с помощью кронштейна 14 крепится фотокамера 15.
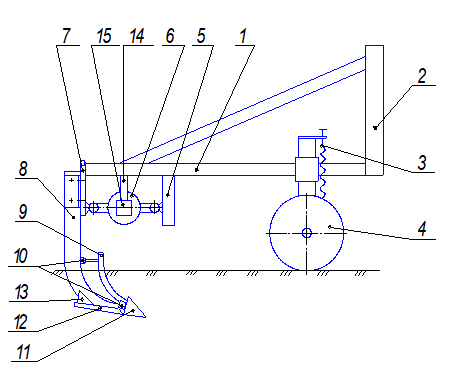
Рисунок 6 Схема экспериментальной установки для определения тягового усилия рабочего органа 1 — система навески; 2 — рама; 3 — система регулировки глубины обработки; 4 — опорное колесо; 5 — консоль; 6 — динамометр; 7 — фотокамера; 8 — шарнирно закрепленная на раме пластина; 9 — стойка; 10 — накладка; 11 — кронштейны; 12 — долото; 13 — полулапа; 14 — ворошитель.
Работа установки осуществляется следующим образом. Навешенное на трактор и отрегулированное на заданную глубину обработки орудие в начальный момент движения трактора в междурядье переводится в рабочее положение. При этом долото 11 осуществляет заглубление полулап 12 с ворошителями 13 и стойки 8 с накладкой 9. Сопротивление почвы, оказываемое орудию за счет шарнирного крепления стойки 8 к пластине 7 передается на тяги, соединенные шарнирами с пластиной 7 и консолью 5, динамометра 6. Перемещение стрелки динамометра 6 фиксирует фотокамера 15, включенная в режиме видеокамеры. В этот момент терминал-регистратор, установленный в кабине трактора, сохраняет информацию о расходе топлива, полученную от датчика расхода топлива и информацию о скорости перемещения, полученную от спутника.
При проведении испытаний был использован терминал-регистратор СКРТ Лайт 31 GPS Технотон и датчик расхода топлива ДРТ-5,1. Измерение тягового усилия рабочего органа осуществлялось с помощью динамометра ДПУ-100−1-УХЛ2 (ТУ 25−06.2088;83).
При планировании эксперимента использовали метод наименьших квадратов по плану Вк. Изучали влияние двух факторов и фиксировали их значения на оптимальных уровнях. Значением для первого фактора x1 является угол заострения стойки, интервал варьирования которого составил двадцать градусов, от 2гmin = 40?, до 2гmax = 60? максимальная величина. Для второго фактора х2 радиус изгиба стойки, интервал варьирования 0,25…0,35 м, скорость перемещения рабочего органа оставалась постоянной — 1,94 м/с.
Факторы, интервалы и уровни варьирования представлены в таблице 1.
Значения факторов фиксировали изготовлением сменных накладок на стойку рабочего органа, которые крепятся к стойке двумя кронштейнами и болтами (рисунок 7). Изготовлено 9 съемных накладок, геометрические размеры которых изменялись по плану эксперимента.
Смена накладки стойки проводилась по разработанному плану случайных чисел.
Таблица 1.
Факторы, интервалы и уровни варьирования.
Факторы. | Кодированные обозначения. | Интервалы варьирования. | Уровни факторов. | |||
; | ||||||
Угол заострения стойки 2 г, град. | х1 | |||||
Радиус изгиба стойки R, м. | х2 | 0,050. | 0,250. | 0,300. | 0,350. | |
а) б)
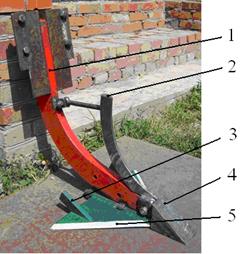

Рисунок 7 Экспериментальный рабочий орган (а) и комплект сменных накладок (б) 1 — стойка; 2 — накладка; 3 — ворошитель; 4 — долото; 5 — полулапа.
Матрица планирования эксперимента представлена в таблице 2.
В результате математической обработки экспериментальных данных получили математическую модель в виде уравнения регрессии второго порядка.
Ys =1831,06−83,9x1+149,9x2+129,375x1 x2+40,89x12-102,5x22 (13).
где Ys — величина тягового сопротивления рабочего органа, Н.
Продифференцировали уравнение (13) по каждой из переменных и приравняли производные к нулю, получили систему линейных уравнений, состоящую из 2-х уравнений.
Таблица 2.
Матрица планирования эксперимента при оптимизации Параметров стойки универсального рабочего органа.
х1 | х2 | х1х2 | х. | х. | Отклик, Н. | ||
; | ; | ||||||
; | ; | ||||||
; | ; | ||||||
; | ; | ||||||
Решили систему линейных уравнений, определили новые координаты центра поверхности отклика х1 = -0.6 548, х2 = 0.68 989.
Подставили в исходное уравнение (13) значения х1, х2, определили значение параметра оптимизации в центре поверхности отклика, при этом получили величину параметра оптимизации, Ys= 1831,06 Н, при скорости перемещения v=7км/ч и глубине обработки 20 см.
Определили угол поворота начальных осей координат до совмещения с новыми осями поверхности отклика, угол поворота осей равен 21°.
Квадратичное уравнение регрессии в канонической форме будет иметь вид согласно.
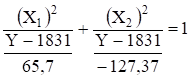
(14).
Удобство формы (14) для анализа и оптимизации заключается в том, что все (Хi) входят в это выражение в квадратах, следовательно, и изменения отклика зависят только от коэффициента и не зависят от направления по оси (Хi) от центра координат.
Поверхность отклика — гиперболоид (рисунок 8 и 9), а ее центр — минимакс, поскольку коэффициенты В11 = 65,7 и В22 = -127,37 имеют разные знаки. Гиперболы вытянуты по той оси, которой соответствует меньшее по абсолютной величине значение коэффициента в каноническом уравнении (14). В этом случае, увеличение радиуса изгиба стойки рабочего органа оказывает большее влияние на величину отклика, чем увеличение угла заострения.
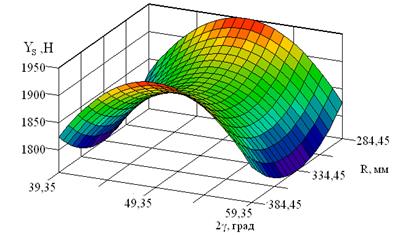
Рисунок 8 Поверхность отклика зависимости факторов.
При этом оптимальные величины варьируемых факторов находятся в центре поверхности отклика.
Каноническое преобразование экспериментальной модели, полученной при помощи метода наименьших квадратов и анализа построенных графиков, показало, что середины интервалов варьирования исследуемых факторов имеют новые значения в кодированном виде х1=-0,065, х2=0,689, и переведенные в натуральный вид:
- — оптимальный угол заострения стойки составил 2 г = 49,35о;
- — оптимальный радиус изгиба стойки R = 334,45 мм;
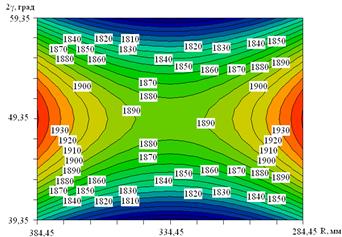
Рисунок 9 Поверхность отклика в двумерном сечении
Выводы
- 1) Получена аналитическая зависимость для расчета продольной составляющей силы сопротивления почвы движению многофункционального рабочего органа, которая показывает, что:
- — увеличение величины угла заострения стойки в пределах интервала варьирования 40…60° приводит к увеличению силы сопротивления с 1610Н до 1930 Н, т. е. возрастает на 19,8%;
- — увеличение радиуса изгиба стойки в пределах интервала варьирования 0,25…0,35 м снижает силу сопротивления, действующую на стойку многофункционального рабочего органа при обработке почвы на 14,5%.
- 2) Проведены экспериментальные исследования универсального рабочего органа с новой стойкой и получена аналитическая зависимость в виде уравнения регрессии второго порядка, в результате анализа которой определены оптимальные параметры новой стойки многофункционального рабочего органа:
- — оптимальный угол заострения стойки составил 2 г = 49,35о;
- — оптимальный радиус изгиба стойки составляет R = 334,45 мм;
- — величина горизонтальной составляющей силы сопротивления почвы составила 1831 Н.
Список использованных источников
- 1. Камбулов, С.И. Механико-технологическое обоснование повышения эффективности функционирования сельскохозяйственных агрегатов [Текст] / С. И. Камбулов // Диссертация на соискание ученой степени доктора технических наук. Краснодар, 2008. 332 с.
- 2. Твердохлебов, С. А. Параметры процесса обработки почвы универсальным рабочим органом по контуру залегания корневой системы плодовых деревьев в междурядьях сада / Дис. … канд. техн. Наук. Краснодар, 2000. 175 с.