Исследование областей, задающих множества разрешенных конфигураций при нахождении механизма мобильного манипулятора в близости от запретных зон
В данном неравенстве, область — определяет параллелепипед, заданный предельными значениями обобщенных координат, 1, 5 — области, точки которых находятся снаружи эллиптических цилиндров. Области 2, 3, 4 задают полупространства, определяемые плоскостями. 6 — область, определяемая параболическим цилиндром. Использование неравенства (3) позволяет вычислять в приближенном виде запрещенные конфигурации… Читать ещё >
Исследование областей, задающих множества разрешенных конфигураций при нахождении механизма мобильного манипулятора в близости от запретных зон (реферат, курсовая, диплом, контрольная)
Исследование областей, задающих множества разрешенных конфигураций при нахождении механизма мобильного манипулятора в близости от запретных зон
Исследованы области пространства конфигураций, задающих совокупность достижимых точек рабочей зоны манипулятора с учетом положения запретных зон. Для аналитического задания областей использована теория множеств и совокупность поверхностей второго порядка.
Ключевые слова: синтез движений роботов, конфигурационное пространство, запретные зоны, интеллектуальные системы управления роботами.


Интеллектуальное управления робототехническими системами позволяет обеспечить их автономное функционирование в сложно организованных средах [1−3]. Одной из задач при этом является сокращение времени расчета, связанного с определением значения вектора приращений обобщенных координат на каждом шаге расчетов. Указанный вектор приращений вычисляют с учетом обеспечения заданного удаления исполнительного механизма манипулятора от запретных зон [4−6]. В работах [7,8] разработаны алгоритмы построения движений механизмов роботов основанные на использовании анализа точек конфигурационного пространства, задающих разрешенные конфигурации. Исследованию области конфигурационного пространства Q задающей множество разрешенных конфигураций для исполнительного механизма манипулятора мобильного робота «Варан» посвящена работа [9]. Запретная зона при этом была задана горизонтальной плоскостью, располагающейся сверху механизма манипулятора мобильного робота (для случая, когда движение осуществляется внутри туннеля). Параметры, задающие форму одной из областей 5 (форму одного из эллиптических цилиндров, который используется для определения области) для этого случая определялись как функции от параметра высоты туннеля, в котором осуществляет движение мобильный робот [9]. В качестве указанных функций были использованы полиномы Лагранжа. Исследуем форму области, когда запретная зона Р ограничивается двумя плоскостями и положения которых определяются параметрами xop и zop (см. рис. 1a). Длины звеньев механизма манипулятора равны следующим значениям O1O2 = 900 мм, O2O3 = 700 мм и O3O4 = 500 мм. Минимальные и максимальные значения обобщенных координат, соответственно, равны (-30о, -120о, -120о) и (120о, 120о, 120о), интервал сетки, задающей исследуемые точки в пространстве Q, был принят равным? qi = 15°. На рисунке 1б изображено множество разрешенных конфигураций при наличии запретной зоны Р при значении параметров xop = 500 мм и zop = 500 мм.
а б Рис. 1 Механизм манипулятора мобильного робота «Варан»:
а — взаимное положение манипулятора мобильного робота и запретной зоны P, б — множество разрешенных конфигураций Параметр Nkol на рисунке 1б определяет количество указанных конфигураций. В таблице приведены сечения области при q1 = 0 и различном расположении плоскостей и заданных значениями xop = 600 мм, zop = 800 мм и xop = 1200 мм, zop = 800 мм. Сечения построены в системах координат Oqq3q4 при заданных фиксированных значениях обобщенной координаты q2 (-120о, -105о, …, 120о).
Таблица — Изображение сечений области при различных положениях плоскостей и
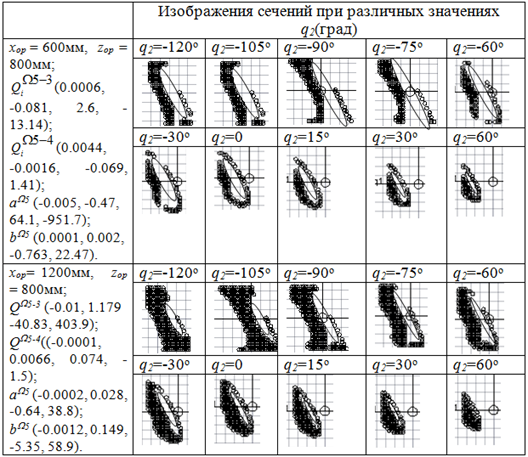


Анализ сечений области показывает, что при задании запретной зоны Р двумя плоскостями и (см. рис. 1а, рис. 2) запрещенные конфигурации в сечениях области задаются точками, располагающимися внутри областей по форме близких к форме областей заданных эллипсами. Начальные положения центров эллипсов и значения длин большой и малой полуосей при этом изменяются при изменении xop, zop и q2. На основе экспериментальных исследований вычислены координаты указанных центров эллипсов, заданных точками Оэл определяемых координатами и (см. рис. 2). Верхние индексы 5−3 и 5−4 определяют принадлежность параметров области 5. Начальные положения центров эллипсов задают функции = f1 (xор, zор), = f2 (xор, zор), которые определены в результате построения множеств сечений области. Графики этих функций представлены на рис. 3аб.

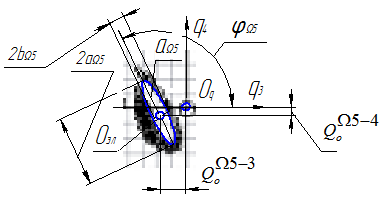
Соответственно начальные численные значения большой и малой осей эллипсов определяют функции = f3 (xор, zор) и = f4 (xор, zор). Угол наклона большой оси эллипса 5 по отношению к оси Oq q3 (эллипсы находятся в плоскостях параллельных плоскости Oq q3q4 конфигурационного пространства) для различных значений xop, zop и q2 не изменяется и равен 5 110о (см. рис. 2). Указанные зависимости представлены на рис.3в-г. Как видно из анализа рисунков представленных в таблице размеры большой a5 и малой b5 осей эллипсов в сечениях области зависят от обобщенной координаты q2 и изменяются не линейно.
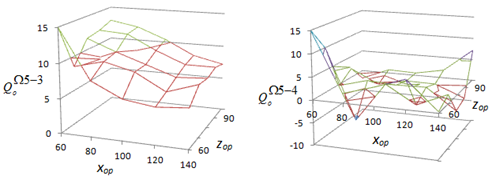
Рис. 2 Параметры формы и положения эллипсов располагающихся в сечениях области
а б.


в г.

Рис. 3 Графики-функции: а — = f1 (xор, zор);



б — = f2 (xор, zор); в — = f3 (xор, zор); г — = f4 (xор, zор).
В связи с этим было принято значения параметров, , a5 и b5 задавать в виде полиномов третей степени:

q5−3 =;
q5−4 =;




a5 =; (1).

b5 = ,.




где, , …,, , определяют коэффициенты полиномов (1), задающих область 5. Значения данных коэффициентов получены экспериментальным путем на основе получения множества сечений при различных значениях xор, zор и q2. Значения указанных коэффициентов для двух положений запретной зоны Р заданы в первом столбце таблицы.

Неравенство, определяющее область 5 пространства Q задающее запрещенные конфигурации имеет следующий вид [9]:

(2).
Неравенство (2) используется в зависимости [9,10]:
((((((1) 2) 3) 4) 5) 6) 0. (3).
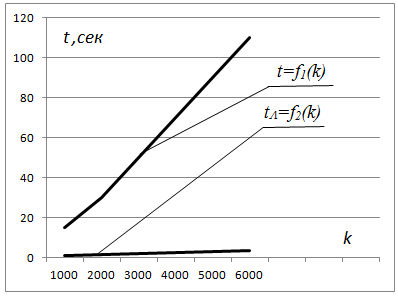
В данном неравенстве, область — определяет параллелепипед, заданный предельными значениями обобщенных координат, 1, 5 — области, точки которых находятся снаружи эллиптических цилиндров [9]. Области 2, 3, 4 задают полупространства, определяемые плоскостями. 6 — область, определяемая параболическим цилиндром [9]. Использование неравенства (3) позволяет вычислять в приближенном виде запрещенные конфигурации при нахождении механизма манипулятора мобильного робота в непосредственной близости от запретной зоны. На рис. 4 представлены графики t = f1(k) и t = f2(k) определяющие зависимость времени вычисления разрешенных конфигураций при использовании двух различных способов расчета. При проведении исследований использовался компьютер на базе процессора Dual Core Intel Core I3−540, оперативная память DDR3 4 Гб, видеоадаптер дискретный Zotac GeForce GTX 560 с объемом памяти 2Гб. Параметр k определяет число итераций при вычислении разрешенных конфигураций при синтезе движений по вектору скоростей.
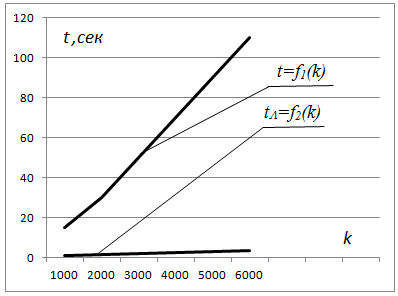
Рис. 4. Графики-зависимости t = f2(k) и t = f1(k)
Данный параметр используется при вычислении вектора обобщенных скоростей при наличии двигательной избыточности. Первый способ t = f2(k) основан на использовании неравенств (2,3) определяющих область. Второй способ t = f1(k) основан на определении пересечений трехмерных примитивов задающих звенья механизмов с запретной зоной. Как видно из графиков функций первый способ расчета разрешенных конфигураций требует на несколько порядков меньше времени вычислений, чем второй.
Разработанное программное обеспечение и полученные аналитические зависимости могут быть использованы как составная часть интеллектуальных систем управления, которые позволяют планировать траектории перемещения манипуляторов в заранее известном сложно организованном пространстве, с целью обеспечения автономного функционирования роботов.
- 1. Ющенко, А. С. Интеллектуальное планирование в деятельности роботов // Мехатроника, автоматизация, управление. 2005. № 3. С. 5 18.
- 2. Макаров, И. М., Лохин В. М., Манько С. В., Романов М. П., Евстигнеев Д. В., Семенов А. В. Интеллектуальные робототехнические системы: принципы построения и примеры реализации. Часть 1 // Мехатроника, автоматизация, управление. 2004. № 11. С. 14 23.
- 3. Егоров, А. С., Лопатин П. К. Использование алгоритма полиномиальной аппроксимации в задаче управления манипулятором в среде с неизвестными препятствиями // Мехатроника, автоматизация, управление. 2013. № 3. С. 2429.
- 4. Притыкин, Ф. Н. Виртуальное моделирование движений роботов, имеющих различную структуру кинематических цепей: монография; ОмГТУ — Омск: Изд-во ОмГТУ, 2014. — 172 с.: ил.
- 5. Притыкин, Ф. Н., Осадчий А. Ю. Способ кодирования информации при задании геометрических моделей исполнительных механизмов роботов // Инженерный вестник Дона, 2014, № 2. URL: indon.ru/ magazine//archive/n2y2014/2363/.
- 6. Ляшков, А.А., Завьялов А. М. Семейство поверхностей, заданное формулами преобразования координат, и его огибающая // «Инженерный вестник Дона», 2013, № 1. URL: ivdon.ru/magazine/archive/n1y2013/1512/.
- 7. Isto P. A parallel motion planner for systems with many degrees of freedom // Proc. of the 10th Intemat. Conf. on Advanced Robotics (ICAR 2001), August 22—25, 2001, Hotel Mercure Buda, Budapest, Hungary. pp. 339—344.
- 8. Lopatin P. K. Algorithm of a manipulator movement amidst unknown obstacles // Proc. of the 10th International Conference on Advanced Robotics (ICAR 2001). August 22—25. 2001. Hotel Mercure Buda, Budapest, Hungary. pp. 327—331.
- 9. Притыкин, Ф.Н., Осадчий А. Ю. Исследование областей пространства конфигураций, задающих совокупность достижимых точек рабочей зоны манипулятора с учетом положения запретных зон // Омский научный вестник. 2014. № 3 (133). С. 70 74.
- 10. Рвачев, В. Л. Методы алгебры логики в математической физике — Киев; 1974. — 256 с.
- 11. References
- 1. Yushchenko, A. S. Mekhatronika, avtomatizatsiya, upravlenie. 2005. № 3. pp. 5 — 18.
- 2. Makarov, I. M., Lokhin V. M., Man’ko S. V., Romanov M. P., Evstigneev D. V., Semenov A. V. Mekhatronika, avtomatizatsiya, upravlenie. 2004. № 11. pp. 14 — 23.
- 3. Egorov, A. S. Mekhatronika, avtomatizatsiya, upravlenie. 2013. № 3. pp. 24 — 29.
- 4. Pritykin, F. N. Virtual’noe modelirovanie dvizheniy robotov, imeyushchikh razlichnuyu strukturu kinematicheskikh tsepey [Virtual modeling movements of robots with different structures kinematic chains]: monografiya. OmGTU. Omsk: Izd-vo OmGTU, 2014. 172 p.: il.
- 5. F. N. Pritykin, A. Yu. Osadchiy. Inћenernyj vestnik Dona (Rus), 2014, № 2 ivdon.ru/magazine/archive/n2y2014/2363
- 6. A.A. Lyashkov, A.M. Zav’yalov. Inћenernyj vestnik Dona (Rus), 2013, № 1 ivdon.ru/magazine/archive/n1y2013/1512
- 12. 9. F. N. Pritykin, A.Yu. Osadchiy. Omskiy nauchnyy vestnik. 2014. № 3 (133). pp. 70 — 74.
- 13. 10. Rvachev, V. L. Metody algebry logiki v matematicheskoy fizike [Methods of algebra of logic in mathematical physics]. Kiev; 1974. 256 p.