Конструкторская часть.
Управление асинхронным двигателем с короткозамкнутым ротором
Непосредственные измерение тока ротора невозможно. Измерение вместо тока ротора тока статора вносит некоторую погрешность. Частота ротора получается путем вычитания из частоты питания частоты вращения ротора, которая получается от частотного датчика, сочлененного с валом двигателя. Поток двигателя получается непосредственно с помощью датчика Холла. Под воздействием системы автоматического… Читать ещё >
Конструкторская часть. Управление асинхронным двигателем с короткозамкнутым ротором (реферат, курсовая, диплом, контрольная)
Частотное управление электродвигателем переменного тока
До последнего времени асинхронные короткозамкнутые двигатели применялись в основном для нерегулируемых электроприводов, так как для регулирования частоты вращения требуется индивидуальный источник переменной частоты.
Появление статических преобразователей частоты расширило применение асинхронных двигателей, сохранив возможности глубокого и экономичного регулирования частоты вращения, присущие системам регулирования с двигателями постоянного тока.
В качестве статического преобразователя частоты наибольшее распространение получили два вида преобразователей :
— автономный инвертор со звеном постоянного тока, который требует предварительного выпрямления тока и последующего инвертирования. Выходная частота не связана с частотой сети и может изменяться от малых значений до нескольких тысяч герц;
— преобразователи с непосредственной связью формируют кривую выходного напряжения из напряжения более высокой частоты в напряжение низкой частоты. При естественной коммутации тока возможный верхний предел изменения выходной частоты при шестифазной реверсивной схеме в каждой фазе двигателя не превышает одной трети частоты питания. Непосредственные преобразователи иногда называют циклоконвертерами.
Законы регулирования электропривода с частотным управлением.
Как известно, напряжение фазы статора асинхронного двигателя где — ЭДС фазы статора, вызванная главным потоком двигателя; - число витков фазы статора; - обмоточный коэффициент статора; - частота питания; - главный поток двигателя.
Из (1.1) следует, что если оставить напряжение неизменным, то при изменении частоты магнитный поток будет изменяться обратно пропорционально частоте напряжения питания. Таким образом, при снижении частоты ниже номинальный поток возрастает, что приводит к насыщению магнитопровода и к резкому возрастанию намагничивающего потока.
Возрастание частоты при неизменном напряжении приводят к недоиспользованию двигателя.
М.П.Костенко сформулировал закон частотного управления: «Если сконструировать асинхронный двигатель для частоты, момента и напряжения на зажимах и изменять затем при частоте и моменте напряжение таким образом, чтобы всегда было удовлетворено соотношение то двигатель будет работать практически при неизменном коэффициенте устойчивости, неизменном cos ц и постоянном абсолютном скольжении и к.п.д., зависящем только от изменения частоты и независящим от изменения момента на валу, если насыщение магнитной системы не слишком велико».
Если учитывать активное сопротивление обмоток статора, то для того, чтобы поток изменялся по правилам, необходимо при малых частотах увеличивать значение .
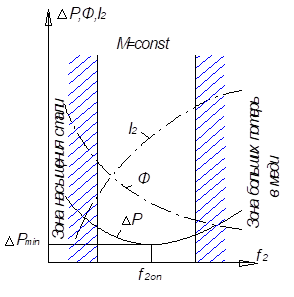
Возможны, естественно, и другие законы регулирования например по максимальному КПД. Поскольку минимальные потери в асинхронном двигателе возникают при определенном значении частоты тока ротора f2 (рис.1), то с изменением частоты так изменяют напряжение статора, чтобы обеспечить работу двигателя при оптимальной частоте ротора. Возникает необходимость независимого от изменений частоты регулирования напряжения в широких пределах.
Электромагнитный момент асинхронного двигателя может быть выражен следующим образом:
где — постоянный коэффициент; - ток ротора; - угол сдвига фаз между Э.Д.С. и током ротора так как ток ротора, частота ротора и главный поток двигателя связаны уравнением (1.4) в процессе управления системы «преобразователь частоты — асинхронный двигатель», нужно контролировать любые две величины, например ток ротора и частоту ротора, главный поток и частоту ротора, ток ротора и главный поток.
Непосредственные измерение тока ротора невозможно. Измерение вместо тока ротора тока статора вносит некоторую погрешность. Частота ротора получается путем вычитания из частоты питания частоты вращения ротора, которая получается от частотного датчика, сочлененного с валом двигателя. Поток двигателя получается непосредственно с помощью датчика Холла. Под воздействием системы автоматического регулирования частота и напряжение преобразователя частоты в статических режимах регулируются так, чтобы обеспечивался заданный закон изменения двух из трех связанных уравнением (1.4) величин.
Применение регулирования скорости асинхронного двигателя изменением частоты питающего напряжения позволяет прежде всего снизить потери электроэнергии, идущие на нагрев двигателя. Так, КПД асинхронного двигателя характеризуется выражением:
где — мощность, потребляемая двигателем; - мощность на его валу. Если предположить, что, где — электромагнитная мощность, передаваемая через воздушный зазор ротору от статора магнитным полем (при этом пренебрегают потерями в статоре асинхронного двигателя), то.
где — статический момент на валу АД; - угловая скорость вращения магнитного поля в воздушном зазоре двигателя,; - угловая частота подводимого к статору АД напряжения; - число пар полюсов обмотки статора АД на фазу; - угловая скорость вращения ротора.
Подстановка (1.6) в (1.5) в предположении, что при регулировании скорости, дает.
где — скольжение двигателя.
Анализ выражения (1.7) показывает, что КПД асинхронного двигателя существенно зависит от скольжения. Потери в двигателе будут минимальны при, стремящемся к нулю, то есть при, близких к. Следовательно, чтобы регулирование было наиболее экономичным, необходимо с изменением скорости вращения ротора АД изменять и угловую скорость вращения поля в воздушном зазоре двигателя, то есть изменять частоту питающего напряжения.
Принципиальная возможность регулирования скорости вращения асинхронного двигателя изменением частоты подводимого к его статору напряжения вытекает непосредственно из выражения для синхронной скорости (скорости идеального холостого хода) АД:
где — частота питающего двигатель напряжения. Из (1.8) следует, что синхронная скорость вращения асинхронного двигателя прямо пропорциональна частоте подводимого к статору асинхронного двигателя напряжения.
Достоинством частотного регулирования скорости является то, что благодаря получающимся при этом режимам с низким скольжением выделение тепла в машине понижается, а это дает значительное повышение КПД двигателя в сравнении с ранее рассмотренными методами. Коэффициент мощности при снижении частоты в связи с уменьшением индуктивных сопротивлений обмоток асинхронного двигателя и работой двигателя при малых скольжениях также увеличиваются.
При регулировании частоты в процессе управления скоростью асинхронного двигателя возникает необходимость изменения и амплитуды (действующего значения) напряжения источника питания. Так, электродвижущая сила обмотки статора асинхронного двигателя пропорциональна произведению частоты и потока в воздушном зазоре двигателя :
где — коэффициент пропорциональности.
Также пренебрегая в первом приближении падением напряжения на сопротивлениях обмотки статора, полагаем, что ЭДС (1.9) равна подводимому к статору АД напряжению :
Как следует из выражения (1.10), при неизменном напряжении источника питания и регулировании его частоты изменяется магнитный поток в воздушном зазоре асинхронного двигателя. Так, при уменьшении магнитный поток возрастает, что приводит к насыщению магнитной системы машины и значительному увеличению тока намагничивания. Это связано с ухудшением энергетических показателей двигателя, с его недопустимым перегревом. При постоянном моменте нагрузки на валу АД увеличение частоты приводит согласно (1.10) при к снижению потока двигателя, что в соответствии с выражением для электромагнитного момента :
где — коэффициент пропорциональности; - приведенный к цепи статора ток ротора, приводит согласно (1.11) к росту тока ротора, то есть к перегрузке его обмоток по току, тогда как сталь оказывается недоиспользованной. Кроме того, увеличение частоты при неизменной амплитуде питающего напряжения связано со снижением критического момента двигателя или его перегрузочной способности.
Для того, чтобы использование асинхронного двигателя при регулировании его скорости было наилучшим, необходимо с изменением частоты подводимого к статору двигателя напряжения одновременно изменять и его амплитуду (действующее значение). При этом соотношение между амплитудой и частотой питающего напряжения двигатель напряжения определяется требованиями, предъявляемыми к статическим и динамическим режимам работы двигателя.
Таким образом, регулирование скорости асинхронных двигателей путем изменения амплитуды и частоты напряжения на его зажимах обеспечивает экономичное, непрерывное регулирование скорости в широких пределах, является одним из наиболее перспективных методов регулирования скорости этого типа двигателей.