Избыточные связи.
Теория машин и механизмов
Лишние степени свободы используются для упрощения кинематической схемы механизма, сокращения потерь при передаче мощности, повышения механического коэффициента полезного действия механизма. Например, между кулачком 1 и толкателем 2 кулачкового механизма устанавливается ролик 3 для устранения трения. В некоторых случаях при проектировании механизмов для повышения жёсткости конструкции, улучшения… Читать ещё >
Избыточные связи. Теория машин и механизмов (реферат, курсовая, диплом, контрольная)
В некоторых случаях при проектировании механизмов для повышения жёсткости конструкции, улучшения условий передачи сил вводятся так называемые избыточные (пассивные) связи (дополнительные звенья).
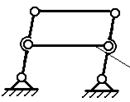
Механизм с избыточной связью В этом случае степень свободы вычисляется по формуле.
W = 3n — 2P5 + q= 34 — 26 + 1 = 1,.
где q — число избыточных (пассивных) связей.
Лишние степени свободы
Лишние степени свободы используются для упрощения кинематической схемы механизма, сокращения потерь при передаче мощности, повышения механического коэффициента полезного действия механизма. Например, между кулачком 1 и толкателем 2 кулачкового механизма устанавливается ролик 3 для устранения трения.
Кулачковый механизм с роликовым толкателем В этом случае степень подвижности механизма, вычисленная по формуле П. Л. Чебышева, будет равна 2:
W = 3n — 2P5 — P4 = 33 — 23 — 1 = 2.
Здесь явно присутствует лишняя степень свободы, а именно вращение ролика под действием силы трения качения. Её следует учитывать при проведении структурного анализа данного механизма. Ведь очевидно, что данный механизм может функционировать и без ролика 3. Но при этом трение качения будет заменено трением скольжения между кулачком и толкателем (высшей кинематической парой), что увеличивает потери мощности в механизме на преодоление сил трения.
Тогда степень свободы такого механизма вычисляется по формуле.
W = 3n — 2P5-P4-q,.
где q — количество лишних степеней свободы.