Регулирование скорости, тока и момента АД с помощью резисторов в цепях ротора
Механические характеристики представлены на рис. 5.15. Промышленностью выпускаются двухскоростные, трехи четырехскоростные АД. Последние имеют две независимые обмотки статора на разное число пар полюсов, каждая из которых переключается по рассмотренным выше схемам. Так как данный способ не обеспечивает требуемых регулировочных свойств АД, он редко используется для регулирования скорости, чаще для… Читать ещё >
Регулирование скорости, тока и момента АД с помощью резисторов в цепях ротора (реферат, курсовая, диплом, контрольная)
Введение
резисторов  в цепь ротора АД с фазным ротором, как это показано на схеме рис. 5.7, изменяет характер механической характеристики, уравнение которой имеет вид:
в цепь ротора АД с фазным ротором, как это показано на схеме рис. 5.7, изменяет характер механической характеристики, уравнение которой имеет вид:
 (5.12).
(5.12).

Рис. 5.7
Рис. 5.8
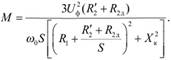
На рис. 5.8 представлены механические характеристики АД с фазным ротором (естественная — при  и искусственные — при
и искусственные — при  ).
).
Проведем анализ механических характеристик.
- 1. Скорость поля статора АД (синхронная скорость) ш" при регулировании
 не изменяется, поэтому все механические характеристики выходят из одной точки
не изменяется, поэтому все механические характеристики выходят из одной точки 
- 2. Критический (максимальный) момент
 остается постоянным, так как не зависит от величины
остается постоянным, так как не зависит от величины  :
:
 (5.13).
(5.13).
3. Критическое скольжение  увеличивается при увеличении
увеличивается при увеличении 
 (5.14).
(5.14).
Так как электрические потери в роторной цепи (потери скольжения).

зависят от скольжения, диапазон регулирования скорости не превышает 2−3. Регулирование скорости осуществляется только вниз от основной, плавность регулирования определяется величиной 
4. Пусковой момент  с увеличением
с увеличением  повышается вплоть до критического
повышается вплоть до критического  , при 5= 1.
, при 5= 1.
 (5.15).
(5.15).
Поэтому введение  используется при пуске АД с большим моментом нагрузки.
используется при пуске АД с большим моментом нагрузки.
Если заданы естественная и искусственная механические характеристики АД, расчет добавочных сопротивлений резисторов  производится, исходя из соотношения:
производится, исходя из соотношения:

откуда.
 (5.16).
(5.16).
где активное сопротивление ротора 
Если заданы только рабочие точки механической характеристики АД, расчет резисторов Rb производят, используя метод отрезков, согласно которому по рис. 5.8.

Где  - ЭДС ротора при 5=1.
- ЭДС ротора при 5=1.
Если задана любая точка на искусственной характеристике ( ;
;  ), то учитывая, что
), то учитывая, что  сопротивление
сопротивление  определяется:
определяется:
 (5.17).
(5.17).
Регулирование координат АД резисторами в цепи статора
Данным способом возможно регулирование скорости АД с короткозамкнутым ротором по схеме (рис. 5.9).
Возможно включение регистров Л1д лишь в одну фазу, что существенно снижает потери энергии. На рис. 5.10 представлено семейство механических характеристик АД при различных значениях  Анализ механических характеристик показывает следующее:
Анализ механических характеристик показывает следующее:
- 1. Так как скорость идеального холостого хода АД не зависит от Л]д, все механические характеристики проходят через точку 03/4.
- 2. Критический момент М, и скольжение 5К обратно пропорциональны
 поэтому с увеличением Ru уменьшаются.
поэтому с увеличением Ru уменьшаются. - 3. При увеличении /?1л пусковой момент М" уменьшается.
Так как данный способ не обеспечивает требуемых регулировочных свойств АД, он редко используется для регулирования скорости, чаще для ограничения тока при пуске, реверсе или торможении. Расчет величин /?, подобен расчету /?, который рассмотрен в п. 5.2.
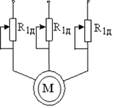
Рис. 5.9
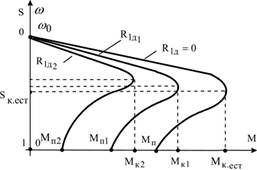
Рис. 5.10
Регулирование скорости АД изменением числа пар полюсов
Данный способ применяется при регулировании скорости многоскоростных АД с короткозамкнутым ротором. При этом происходит ступенчатое изменение скорости вращения магнитного поля.

где р" — число пар полюсов обмотки статора АД. Изменение р" возможно, если на статоре АД имеется две независимых обмотки с разным числом пар полюсов  . Тогда.
. Тогда.

и АД имеет разные механические характеристики. Такие многоскоростные АД называются многообмоточными. Кроме того, изменение числа пар полюсов можно получить переключением ветвей каждой фазы одной обмотки. Это иллюстрируется на рис. 5.11. Переключением ветвей фазы обмотки статора с последовательного согласного включения (а) на последовательное встречное (б) или на параллельное встречное включение (в) достигается изменение числа пар полюсов с р" = 2, на Рп2 = A, i/2. Эти соединения ветвей каждой фазы в трехфазной системе реализуются в виде переключений обмоток с треугольника на двойную звезду или со звезды на двойную звезду.
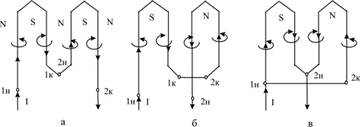
Рис. 5.11
Схема переключения обмоток статора АД с треугольника на двойную звезду представлена на рис. 5.12, а.
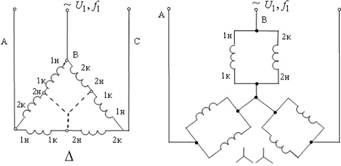
Рис. 5.12
При соединении в треугольник имеет место последовательное согласное включение ветвей фазы обмотки, что соответствует (рис. 5.11, о)  , а при переключении на двойную звезду параллельное встречное соединение ветвей обмотки (рис. 5.11, в), что соответствует
, а при переключении на двойную звезду параллельное встречное соединение ветвей обмотки (рис. 5.11, в), что соответствует  Следовательно,
Следовательно,  в два раза выше, чем
в два раза выше, чем  . Потребляемая мощность АД при номинальной нагрузке при соединении в треугольник равна.
. Потребляемая мощность АД при номинальной нагрузке при соединении в треугольник равна.

а при соединении в двойную звезду.

Следовательно, потребляемая мощность при переключении обмоток с треугольника на двойную звезду изменяется незначительно. Поэтому механические характеристики АД при переключении с треугольника на двойную звезду соответствуют регулированию при постоянной мощности. При этом при увеличении со, в два раза, критический и пусковой моменты уменьшаются в 2 раза (рис. 5.13).
Схема переключения обмоток статора АД со звезды на двойную звезду представлена на рис. 5.14. При соединении на звезду ветви фазы обмотки включены последовательно, согласно и образуют две пары полюсов  . При этом потребляемая мощность равна.
. При этом потребляемая мощность равна.

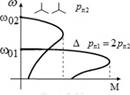
Рис. 5.13
Следовательно, при переключении со звезды на двойную звезду как скорость, так и потребляемая мощность увеличивается в 2 раза. Это значит, что в этом случае регулирование осуществляется при постоянном моменте.
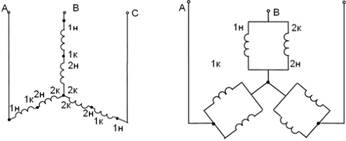
Рис. 5.14
Механические характеристики представлены на рис. 5.15. Промышленностью выпускаются двухскоростные, трехи четырехскоростные АД. Последние имеют две независимые обмотки статора на разное число пар полюсов, каждая из которых переключается по рассмотренным выше схемам.
Рассмотренный способ регулирования скорости АД достаточно экономичен, механические характеристики имеют высокую жесткость и достаточную перегрузочную способность [11],.
К недостаткам следует отнести ступенчатость изменения скорости АД и небольшой диапазон ее регулирования, не превышающий 6−8.
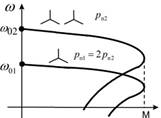
Рис. 5.15