Нелинейность в однозначной характеристике
В зависимости от метода линеаризации аппроксимирующие линии будут иметь разные коэффициенты, а и Ь. Следовательно, значения нелинейности, полученные разными способами, могут серьезно отличаться друг от друга. Рис. 9.15. Линейная аппроксимация нелинейной передаточной характеристики (а) и независимая линеаризация (б). После чего, применяя формулу линейной регрессии, определяют значения коэффициентов… Читать ещё >
Нелинейность в однозначной характеристике (реферат, курсовая, диплом, контрольная)
Гистерезис, ограничение и прочие особенности характеристики также являются нелинейностью. Но здесь мы обсудим нелинейность как таковую для однозначной характеристики датчика, т. е. характеристики, не обладающей гистерезисом.
ПХ датчиков аппроксимируют прямой линией по уравнению (9.1). Характеристика «нелинейность датчика» — это максимальное отклонение L реальной ПХ от аппроксимирующей прямой линии. Иногда некоторые авторы ошибочно применяют термин «линейность», подразумевая «нелинейность».
При проведении нескольких циклов калибровки выбирается худшее из полученных значений нелинейности. Нелинейность выражается в процентах от максимального входного сигнала либо в единицах измеряемых величин. В зависимости от способа аппроксимации различают несколько типов линеаризации. Один из способов — проведение прямой через конечные точки передаточной функции (линия 1 на рис. 9.15, а). При такой линеаризации ошибка нелинейности минимальна в конечных точках и максимальна в промежутке между ними.
Другой способ линеаризации основан на применении метода наименьших квадратов (линия 2 на рис. 9.15, а). Для этого в широком диапазоне измеряемых величин (лучше в полном диапазоне) для ряда значений (п) внешних воздействий s измеряются выходные сигналы S.
После чего, применяя формулу линейной регрессии, определяют значения коэффициентов а и Ь:
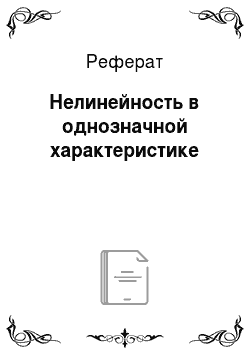
![Линейная аппроксимация нелинейной передаточной характеристики (а) и независимая линеаризация (б) [27].](/img/s/8/03/1317503_1.png)
Рис. 9.15. Линейная аппроксимация нелинейной передаточной характеристики (а) и независимая линеаризация (б) [27].
На практике в некоторых случаях может потребоваться большая точность линеаризации в узком диапазоне входных сигналов, а вне этой зоны точность может быть ниже. В этом случае калибровку проводят в той области, где требуется повышенная точность, после чего через калибровочную точку с проводится аппроксимирующая линия (линия 3 на рис. 9.15, а). В результате наименьшее значение нелинейности достигается в зоне калибровочной точки, а ближе к концам диапазона измерения линейность значительно ухудшается. В данном методе аппроксимирующая линия часто является касательной к передаточной характеристике в точке калибровки с. Если известно выражение для реальной передаточной функции, наклон этой линии может быть найден по уравнению (9.16).
Метод независимой линеаризации часто называется методом наилучшей прямой (рис. 9.15, б). Он заключается в нахождении линии, проходящей посередине между двумя параллельными прямыми, расположенными как можно ближе друг к другу и охватывающими все выходные значения реальной передаточной функции.
В зависимости от метода линеаризации аппроксимирующие линии будут иметь разные коэффициенты а и Ь. Следовательно, значения нелинейности, полученные разными способами, могут серьезно отличаться друг от друга.