Рекомендуемые технические решения по узлам саувт.
Особенности проектирования фильтров
Причина этого в том, что каждый ОУ обладает собственными шумами и дрейфом нуля. Если на предыдущем каскаде усиление равно К < 1, то шумы последующего каскада вносят вклад в К раз меньше по амплитуде. Можно сказать, что энергия шумов складывается, поэтому вклад последующего каскада будет по энергии в К2 меньше. Если К = 1, то вклад шумов второго каскада равен вкладу шумов первого каскада, что… Читать ещё >
Рекомендуемые технические решения по узлам саувт. Особенности проектирования фильтров (реферат, курсовая, диплом, контрольная)
Фильтрация сигналов представляет существенный интерес, многие авторы уделяют этому вопросу значительное внимание.
Наш опыт позволяет выдвинуть следующие тезисы в отношении фильтрации сигналов, применяемых в САУВТ.
1. Далеко не всегда лучшая фильтрация сигнала обеспечивает лучшую точность системы. Иногда более резкая фильтрация приводит к тому, что сдвиг фаз вблизи границы между частотами, которые представляют интерес, и частотами, которые должны быть исключены из спектра сигнала, изменяется слишком резко. Слишком резкое увеличение сдвига фаз приводит к невозможности обеспечения требуемого быстродействия системы. В итоге приходится делать систему слишком медленную, по сравнению с потенциальными возможностями. Если же при фильтрации ограничиться первым порядком фильтра, это не помешает осуществить устойчивое управление в широкой полосе частот. Та часть спектра сигнала, которая не попадает в полосу системы, все равно несущественно влияет на работу этой системы, поэтому в большинстве случаев лучше отказаться от чрезмерно качественной фильтрации.
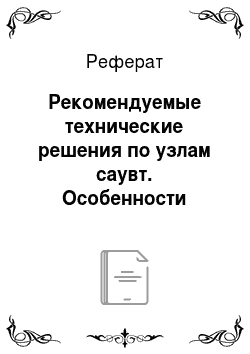
Так, на рис. 6.1 показан пример возможного вида спектральных плотностей возмущения и шума. Возмущение SH, поступающее на систему, отклоняет ее выходной сигнал от предписанного равновесного состояния. Для борьбы с возмущением следует измерять его как можно лучше. Если даже возмущение само по себе измерению не подлежит (как правило, это именно так), то результат действия возмущения всегда может быть измерен, иначе нет смысла проектировать систему стабилизации. Результатом является выходной сигнал объекта. При измерении этого сигнала в сигнале на выходе датчика может присутствовать шум измерения, который показан в виде спектральной плотности SN.
Стремясь наиболее точно измерить возмущение с как можно меньшим влиянием шума на результат измерения, исследователь может пожелать сделать фильтр как можно более крутым, как показано штрихпунктирной линией. В этом случае вся та полоса частот, где измерение осуществляется с отношением сигнал/шум больше единицы, попадает в область пропускания фильтра, а вся та область, где это отношение меньше единицы, должна быть отрезана как можно лучше. Такое решение ошибочно. Лучшим решением является использование фильтра, ЛАЧХ которого условно показана штриховой линией. Область пропускания такого фильтра существенно шире, она простирается намного дальше частоты среза, т. е. той частоты, которая предположительно будет соответствовать единичному усилению контура стабилизации. При этом склон фильтра также отличается: он делается не как можно более крутым, а как можно менее крутым, чтобы его влияние на фазочастотную характеристику контура стабилизации было как можно меньшим.
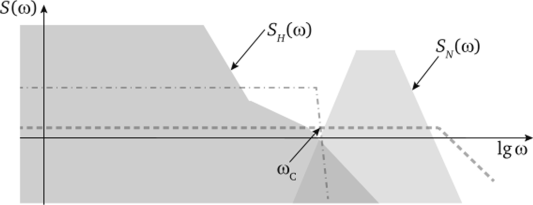
Рис. 6.7. Возможный вид спектральных плотностей возмущения 5н(к>) и шума SN(со) и оптимальное значение частоты среза юс.
2. Заграждающий фильтр в представлении некоторых специалистов не слишком сильно ухудшает сигнал, поэтому если в сигнале присутствует неустранимая наводка или помеха на фиксированной частоте, многие разработчики склонны к применению такого фильтра. На рис. 6.2 приведена иллюстрация этой ситуации. При анализе сигнала на осциллографе результат фильтрации действительно выглядит привлекательным.

Рис. 6.2. Возможный вид спектральных плотностей возмущения SH(co) и шума SN(a) и оптимальное значение частоты среза юс.
Однако введение такого фильтра также создает существенные фазовые сдвиги в этом сигнале, что также усложняет проектирование быстродействующей обратной связи, поэтому от фильтра, ЛАЧХ которого показана штрихпунктирной линией, следует отказаться. Лучше использовать фильтр, ЛАЧХ которого показана штриховой линией, т. е. плавный, — не заграждающий фильтр, а фильтр нижних частот. Казалось бы, очень странно, что мы рекомендуем оставить высокочастотную помеху в сигнале, не опасаемся, что она приведет к нарушению устойчивости системы. Однако следует отметить, что нарушение устойчивости вызывается не видом сигнала, поступающего на вход системы, а свойствами самого контура стабилизации. В первом случае на вход системы будет поступать сигнал благоприятного вида (только по субъективной оценке наблюдателя за этим сигналом, использующего осциллограф), но устойчивость системы будет нарушена либо ее запас будет недостаточным, что определяется большим фазовым сдвигом в области, где усиление контура еще соизмеримо с единицей. Во втором случае при исполнении наших рекомендаций на вход будет поступать сигнал, менее благоприятный (по субъективной оценке), но система будет иметь большой запас устойчивости. В таком случае этот сигнал она будет фильтровать, поскольку всякая система стабилизации действует как фильтр низких частот по отношению к заданию, поэтому второй вариант предпочтительнее.
3. Применение фазосдвигающих фильтров актуально в системах, использующих синхронное детектирование. Такие системы весьма распространены и применяются для настройки объекта на экстремум какой-либо величины, т. е. на максимум или на минимум. Велико искушение у разработчиков применить фазосдвигающий фильтр для достижения совпадения фаз на входах синхронного детектора. Следует помнить, что в информационный канал не следует вводить такие фильтры, их можно применять лишь в канале опорного сигнала, причем в этом случае нет никаких ограничений на вносимые запаздывания сигнала, поскольку опорный сигнал не несет никакой информации о состоянии объекта, его запаздывание ни на чем не сказывается. На рис. 6.3 показан пример правильной функциональной схемы системы автоматического управления для настройки на экстремум. На рис. 6.4 показан пример неправильной схемы.
Примечательно, что указанная оговорка кажется почти очевидной, но в некоторых случаях велико бывает искушение ввести фильтр именно в информационный канал, как показано на рис. 6.4. Дело в том, что в некоторых случаях используется детектирование не на частоте вносимого возмущения, а на гармонике от этой частоты. Так, например, стабилизация частоты излучения лазера зачастую делается на третьей гармонике. Например, генератор формирует тестовое возмущение на частоте Fj = 1 кГц, а детектирование осуществляется на частоте F3 = 3 кГц. В этом случае генератор должен иметь выход обеих частот, эти частоты должны быть связаны между собой по фазе однозначно, т. е. сдвиг во времени между каждым третьим импульсом высокой частоты F3 и импульсами основной гармоники Fx должен быть всегда постоянным. Этот сдвиг и необходимо регулировать вручную с помощью фазовращающего фильтра.

Рис. 6.3. САУ настройкой на экстремум:
СД — синхронный детектор; фазовращающий фильтр расположен правильно.
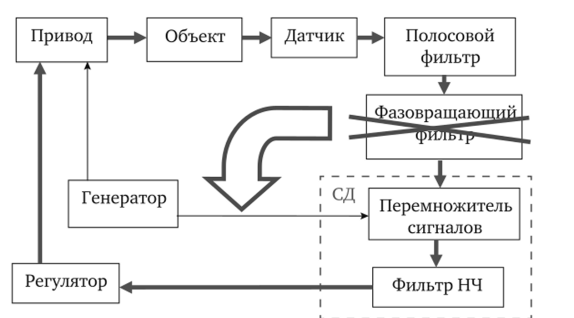
Рис. 6.4. САУ настройкой на экстремум:
фазовращающий фильтр расположен неправильно; фазовращательный фильтр не должен располагаться в контуре управления.
- 4. Фильтр Салена — Ки (или Салена — Кея) не следует применять ни при каких обстоятельствах. Этот вид фильтров в различных исполнениях, в зависимости от порядка и вида (ФНЧ, ФВЧ, полосовой, заграждающий), является одним из популярнейших наборов структур фильтров на основе ОУ [24—25]. В них всегда применяется положительная обратная связь, и это всегда плохо. Устойчивость любого такого фильтра, а также его частотные характеристики зависят от глубины этой обратной связи, а глубина, в свою очередь, зависит от статического коэффициента ОУ и от его входного сопротивления. Вместе с тем коэффициент статического усиления в ОУ не является фиксированной (нормированной) величиной. Для подавляющего большинства применений ОУ этот коэффициент должен быть как можно больше, поэтому разработчики усилителей гарантируют лишь минимальную величину этого коэффициента, а максимальная величина не ограничивается. Операционные усилители одного и того же типа и из одной и той же партии могут иметь разные статические коэффициенты усиления. Это же относится к входному сопротивлению (импедансу), эта величина у различных ОУ может отличаться на порядки. Это означает, что отлаженная схема фильтра Салена — Ки при замене ОУ на другой исправный усилитель того же типа может потребовать новой отладки, а при замене на ОУ другого типа новая отладка неизбежна, фильтр даже может стать неустойчивым. Это является большим недостатком. На рис. 6.5 показаны фильтры НЧ и ВЧ второго порядка по указанным структурам. Входное сопротивление ОУ включается параллельно конденсатору Cj в ФНЧ или резистору в ФВЧ, поэтому делитель, который определяет долю сигнала, попадающего на неинвертирующий вход, невозможно рассчитать, не зная входного импеданса ОУ. Из этого следует справедливость сказанного выше. Разработчику следует стремиться к проектированию таких устройств, которые не требуют отладки и будут идентичными при использовании идентичных типовых элементов и узлов, в том числе ОУ. Кроме того, при разработке схем на основе ОУ желательно, чтобы эти схемы не ухудшали свои параметры также и при замене одного типа ОУ на другой, особенно на лучший. Например, замена на усилитель с большим быстродействием или с меньшими шумами, или с большим входным сопротивлением, или с большим статическим коэффициентом усиления должна лишь улучшать работу фильтра. С этой точки зрения фильтры Салена — Ки неприемлемы. Мы рекомендуем фильтры на основе структуры Рауха [6; 24—26], где используется лишь отрицательная обратная связь, как показано на рис. 6.6. В таких фильтрах при правильно рассчитанных параметрах пассивных элементах (сопротивлениях и емкостях) использование почти любого ОУ допустимо в равной степени, замена усилителя на усилитель с большим быстродействием, большим коэффициентом усиления и (или) меньшими шумами не вызовет изменения его частотных свойств и передаточных характеристик. Действительно, за счет действия отрицательной обратной связи потенциал на инвертирующем входе ОУ всегда равен нулю, входное сопротивление (импеданс) ОУ не влияет на передаточную функцию фильтра, на неинвертирующий вход усилителя поступает нулевой потенциал, его входное сопротивление также не влияет на результат преобразования сигналов на этом фильтре. Замена ОУ не только на другой усилитель того же вида, но и вообще на любой ОУ не изменяет передаточной функции фильтра, достаточно лишь того, чтобы ЛАЧХ ОУ во всем диапазоне частот была больше, чем расчетная ЛАЧХ реализуемого фильтра. Это очевидное требование должно выполняться всегда, для фильтров по структуре рис. 6.5 оно столь же необходимо, но отнюдь не достаточно.
- 5. Применение активных фильтров или активных усилителей с коэффициентом усиления менее единицы (аттенюаторов) не рекомендуется.
Причина этого в том, что каждый ОУ обладает собственными шумами и дрейфом нуля. Если на предыдущем каскаде усиление равно К < 1, то шумы последующего каскада вносят вклад в К раз меньше по амплитуде. Можно сказать, что энергия шумов складывается, поэтому вклад последующего каскада будет по энергии в К2 меньше. Если К = 1, то вклад шумов второго каскада равен вкладу шумов первого каскада, что недопустимо, среднеквадратический шум увеличится на 41%. Если К < 1, то ситуация еще хуже. Если же К = 2, вклад второго каскада в энергию шума составит лишь 25%, а в среднеквадратический уровень шума — 11,8% (если используется ОУ того же типа). При К = 3 этот вклад составит соответственно 11% по энергии и 5,4% по среднеквадратическому шуму и т. д. При правильном расчете коэффициентов многокаскадного фильтра специальные требования по малому уровню шумов предъявляются лишь к первому каскаду, последующие каскады можно реализовать на усилителях с большим уровнем шумов, что позволяет удешевить систему. Если же требуется предельная точность системы, то последующие каскады также реализуются на малошумящих усилителях, но правильный расчет при этом позволяет достичь рекордно малых шумов всей системы.
![Фильтры Салена — Ки (нижних частот и верхних частот) [24; 25].](/img/s/8/09/1317509_5.png)
Рис. 6.5. Фильтры Салена — Ки (нижних частот и верхних частот) [24; 25]:
виден контур положительной обратной связи.
![Фильтры Рауха [25].](/img/s/8/09/1317509_6.png)
Рис. 6.6. Фильтры Рауха [25]:
контур положительной обратной связи отсутствует, имеется лишь отрицательная обратная связь.
- 6. Применение четного количества активных фильтров в пределах одного блока также не рекомендуется. Дело в том, что рекомендуемая структура Рауха осуществляет инвертирование сигнала на каждом каскаде. Инвертирование при фильтрации или иной обработке сигналов всегда предпочтительнее, чем его отсутствие. Если же количество каскадов четное, то возникает система с положительной обратной связью. Такой блок фильтров может оказаться неустойчивым вследствие паразитных наводок, если и общий коэффициент усиления паразитного контура больше единицы. Использование нечетного количества фильтров в одном блоке исключит такую вероятность. Аналогичная ситуация наблюдается при включении усилителей в концертных залах: звуковой сигнал от микрофона через усилители распространяется на акустические колонки, формирующие звук в зале, и этот звук может попадать обратно на микрофоны. В этом случае может возникнуть возбуждение (в колонках возникает очень громкое гудение на одной какой-то частоте). Для исключения такого возбуждения достаточно уменьшить коэффициент усиления в этом паразитном контуре, для этого следует либо убавить громкость, либо отвернуть микрофоны от динамиков. В обсужденном случае невозможно исключить положительную обратную связь, поскольку звук в зале распространяется с относительно низкой скоростью, задержка фазы может превышать 360°, поэтому обратная связь на каких-то звуковых частотах всегда может стать положительной. В случае проектирования фильтра такой проблемы, как правило, не возникает, выбор нечетного количества активных фильтров решает проблему кардинально.
- 7. В фильтрах зачастую используются дроссели. Следует учитывать, что дроссели создают вокруг себя электромагнитное поле, поэтому расположение в непосредственной близости нескольких дросселей может привести к их нежелательному взаимному влиянию. На рис. 6.7 показано рекомендуемое расположение дросселей на печатной плате. Как видно, для третьего дросселя уже практически нет места (можно лишь предложить поставить его вертикально). На рис. 6.8 показано нерекомендуемое расположение дросселей.
- 8. Вероятно, не следует стремиться удалить из сигнала путем применения аналоговых фильтров все те частоты, которые достоверно не представляют интереса. Поскольку большая часть операций обработки сигналов осуществляется цифровыми средствами (что мы настоятельно рекомендуем), лишнюю информацию можно удалить в процессе цифровой обработки. В этом случае можно гарантировать более точное удаление лишней информации и сохранение нужной части сигналов, поэтому при расчете фильтров достаточно руководствоваться необходимостью соблюдения условий теоремы Котельникова (с избыточностью) для заданной частоты преобразования, характерной для выбранного (и используемого) АЦП. Избыточность в 5—10 раз по частоте преобразования необходима, так как условия теоремы сформулированы для идеальных случаев преобразования и восстановления сигналов. Некоторые авторы рекомендуют сочетать цифровую фильтрацию с прореживанием сигнала [23], чего мы категорически не рекомендуем.

Рис. 6.7. Рекомендуемое расположение дросселей на печатной плате и зоны наибольшего влияния их электромагнитных полей
Алгоритм прореживания может предполагать, например, удаление каждого нечетного результата преобразования АЦП. Это крайне неверно. Сверх того, что часть полезной информации теряется, это даже может породить дополнительную ошибку. Действительно, если, например, следящий АЦП совершает колебания около равновесного состояния, то может оказаться, что все четные отсчеты имеют положительное отклонение от равновесного состояния, а нечетные — отрицательное. Тогда прореживание даст паразитное отклонение в одну сторону.
Рис. 6.8. Категорически не рекомендуемое расположение дросселей на печатной плате и зоны наибольшего влияния их электромагнитных полей (образуется паразитный трансформатор).
Можно возразить, что такая ситуация маловероятна. Но, во-первых, не следует допускать возможность даже маловероятной ситуации, во-вторых, даже если частота колебаний сигнала АЦП не совпадет с частотой прореживания, то эффект возникнет на частоте, равной разности этих частот, а это уже не маловероятный случай, а гарантированный. Вместо прореживания следует применять усреднение двух или более соседних отсчетов. Такое усреднение даже способствует повышению разрешающей способности АЦП, т. е. повышению точности преобразования.