Промышленные роботы и манипуляторы
Управляющая (интеллектуальная) система служит для выработки законов управления приводами (двигателями) и механизмами двигательной системы на основе сигналов обратной связи от информационной системы. Другая важная функция данной системы — организация общения робота с человеком, распознавание ситуаций и моделирование среды, планирование действий и принятие целенаправленных решений, программирование… Читать ещё >
Промышленные роботы и манипуляторы (реферат, курсовая, диплом, контрольная)
В последние годы в мировой промышленности переработки пластмасс все шире применяются промышленные роботы. Причин тому несколько. Главная — существенное снижение брака при улучшении качества изделий, которое, как известно, определяет их конкурентоспособность. На переработку пластмасс приходится от 10 до 15% всего парка мирового выпуска промышленных роботов. Основными производителями таких роботов являются фирмы Японии, Китая, Кореи, США, Германии и Франции. Если в 1985 г. робототехнику использовали предприятия с числом занятых свыше 500 человек, то в настоящее время это количество уменьшилось приблизительно в 10 раз. Большинство крупных зарубежных производителей оборудования для переработки пластмасс комплектуют или предусматривают комплектацию своих изделий промышленными роботами [1].
Общие сведения о роботах
Робот в общем случае состоит из следующих систем [2] (рис. 6.1):
- — исполнительной (двигательной);
- — управляющей (интеллектуальной);
- — информационно-измерительной (сенсорной);
- — системы связи.
К окружающей среде промышленного робота относятся, например, технологическое оборудование, объекты манипулирования, препятствия в его рабочей зоне и т. д.
Управляющая (интеллектуальная) система служит для выработки законов управления приводами (двигателями) и механизмами двигательной системы на основе сигналов обратной связи от информационной системы. Другая важная функция данной системы — организация общения робота с человеком, распознавание ситуаций и моделирование среды, планирование действий и принятие целенаправленных решений, программирование и оптимизация движений. Данная функция роботов обычно реализуется на основе ЭВМ или микропроцессоров, содержащих широкий набор входных (аналого-цифровых) и выходных (цифро-аналоговых) преобразователей и интерфейсных каналов связи. Адаптационные возможности и интеллектуальные способности робота определяются главным образом алгоритмическим и программным обеспечением его управляющей системы.
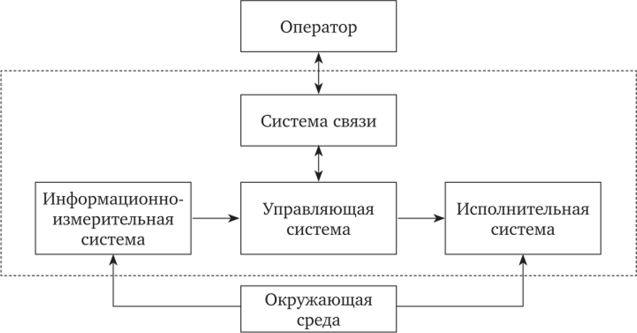
Рис. 6./. Обобщенная структура робота.
Система связи предназначена для обмена информацией между роботом и человеком, а также для связи с другими роботами и различными функциональными устройствами (в том числе технологическим оборудованием) с целью передачи заданий роботу, контроля над функционированием робота, диагностики неисправностей и т. п. Информация от человека к роботу поступает, как правило, через устройство ввода или с пульта управления. Информация, поступающая от робота к человеку, как правило, имеет форму световых и звуковых сигналов и передается с помощью дисплеев, телевидения, синтезаторов речи и т. д.
Информационная (сенсорная) система предназначена для восприятия и преобразования информации о состоянии внешнего мира и самого робота в соответствии с требованиями управляющей системы. В качестве элементов сенсорной системы обычно используются телевизионные и оптико-электронные устройства, акустические датчики и гидролокаторы, лазерные и ультразвуковые дальномеры, тактильные, контактные и индукционные датчики, а также датчики положения, скорости, сил, моментов и др.
Совокупность описанных систем робота образует его информационно-управляющую систему. Эта система предназначена для обработки информации и непосредственного управления приводами и механизмами двигательной системы в целях организации активного взаимодействия робота с окружающей средой и выполнения заданий, сформулированных человеком.
Исполнительная, или двигательная, система предназначена для отработки управляющих сигналов, формируемых управляющей системой. Тем самым обеспечивается возможность целенаправленного воздействия робота на окружающую среду. Исполнительная система определяет динамические свойства робота, в частности его способность совершать разнообразные движения. В качестве исполнительных систем применяются механические манипуляторы, устройства передвижения, электромагнитные и пневматические манипулирующие устройства. Исполнительная система может также включать силовую лазерную установку, целенаправленно воздействующую на объекты окружающей среды, или устройство, манипулирующее объектами с помощью электромагнитного силового поля [2].
Робот — система обучаемая и адаптивная. Необходимую информацию (знания и навыки) ему можно передавать в режиме обучения как путем непосредственного занесения ее в память управляющей системы, так и посредством воздействия через сенсорную систему (например, показом объектов из определенного класса).
В ходе обучения (или самообучения) управляющая система изменяет свои параметры или структуру, т. е. адаптируется. Важно отметить, что именно способность роботов к обучению и адаптации путем активного взаимодействия с окружающей средой отличает их от традиционных средств автоматизации (ЭВМ, промышленные автоматы с жесткой структурой, автоматические линии и т. п.). Традиционные (необучаемые) автоматы и автоматические линии конструируются таким образом, чтобы в течение всего срока эксплуатации надежно выполнять только ту операцию, для автоматизации которой они предназначены. Поэтому применение необучаемых автоматов с жесткой структурой (например, станков-автоматов) целесообразно и экономически выгодно только при многократном повторении рабочей операции. Такие условия характерны для массового и крупносерийного производства.
В отличие от традиционных автоматов, роботы служат для решения не одной конкретной задачи (операции), а некоторого класса задач. В этом проявляется их универсальность. Функциональные возможности робота определяются разнообразием датчиков сенсорной системы, числом степеней свободы и конструктивными особенностями двигательной системы, автоматизмом и уровнем «интеллекта» управляющей системы.
Характерной чертой роботов является гибкость, т. е. способность оперативно перестраиваться с решения одной задачи (операции) на другую. Обычно это достигается путем переобучения (перепрограммирования) робота или в автоматическом режиме.