Корректирующие устройства в системах автоматизации
Параллельное включение корректирующих звеньев требует обязательного наличия в цепи автоматической системы цепи обратной связи. Под обратной связью будем понимать всякую подачу сигнала с выхода объекта на его вход, целиком или частично, в неизменном или преобразованном виде. Если объект регулирования можно расчленить на несколько связанных между собой элементов, то в принципе в такой системе… Читать ещё >
Корректирующие устройства в системах автоматизации (реферат, курсовая, диплом, контрольная)
Понятие устойчивости или неустойчивости автоматической системы определяет только факт затухания колебаний в системе. Однако и при наличии затухания переходный процесс в системе может происходить различным образом, что определяется показателями качества переходного процесса. Существуют различные методы обеспечения требуемого качества переходного процесса в динамических системах.
Удобным методом обеспечения устойчивости системы и получения требуемого качества переходного процесса является введение в ее схему так называемых корректирующих звеньев. Эти устройства представляют собой компоненты со специально подобранными динамическими характеристиками, а их конструкция позволяет независимо от других элементов схемы достаточно просто изменять их параметры. Типы и способы включения таких звеньев могут быть различными в зависимости от того, что именно в системе необходимо исправить. В зависимости от способа их включения в общую схему системы управления различают последовательные и параллельные корректирующие звенья.
Последовательные корректирующие звенья, как это следует из их названия, включаются в цепь основного воздействия последовательно и преобразуют сигнал рассогласования в производную или в интеграл по времени от величины этого рассогласования.
Если последовательно включается дифференцирующее корректирующее звено, то этим увеличивается скорость воздействия на автоматическую систему. Однако, чтобы отработать такое форсированное воздействие, требуется большая мощность исполнительного механизма, а если выходом всей системы является механическая величина, то необходимо обеспечить и большую прочность всех компонентов системы.
Если последовательно включается интегрирующее звено, то со временем величина отклонения должна быть сведена к нулю. Это значит, что в такой системе устраняется статическая ошибка, а, значит, и вся система должна быть теперь отнесена к астатическим.
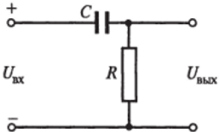
Рис. 13.10. Электрический дифференцирующий контур.
Практически в электрических цепях автоматических систем в качестве последовательных корректирующих звеньев используются пассивные (т. е. не имеющие собственных внутренних источников энергии) /?С-контуры. Схема такого корректирующего электрического RC-контура приведена на рис. 13.10.
В соответствии с законом Кирхгофа сумма входного напряжения Un, падения напряжения на емкости Uc и падения напряжения на резисторе ?/Л, равного выходному напряжению ?/вих, должна равняться нулю. Но поскольку заряд конденсатора Q = С С/и, то, дифференцируя по времени обе части этого равенства и учитывая постоянство величины электрической емкости С, получим.

Тогда  т. е. выходное напряжение такого контура оказывается пропорциональным скорости изменения его входного напряжения, что и соответствует первой производной по времени.
т. е. выходное напряжение такого контура оказывается пропорциональным скорости изменения его входного напряжения, что и соответствует первой производной по времени.
Примером использования последовательного корректирующего звена может служить его включение в цепь возбуждения электрического генератора для поддержания постоянного возбуждения независимо от нагрузки и других заранее не известных возмущений. Фактическое отклонение напряжения генератора от заданного является входным напряжением описанного дифференцирующего контура, включенного в рабочую цепь регулируемого генератора, а его выходное напряжение после необходимого усиления подается на вспомогательный электродвигатель, перемещающий ползунок реостата в цепи возбуждения данного генератора. Таким образом, введением последовательного дифференцирующего корректирующего звена оказывается возможным заставить регулируемый объект реагировать не только на отклонение регулируемого параметра, но и на ту скорость, с которой этот параметр начинает изменяться, хотя бы он еще и не достиг отклонения, соответствующего разрешающей способности чувствительного элемента. Это увеличивает способность автоматической системы к реагированию на происходящие в ней отклонения параметров и улучшает ее динамические свойства.
Параллельное включение корректирующих звеньев требует обязательного наличия в цепи автоматической системы цепи обратной связи. Под обратной связью будем понимать всякую подачу сигнала с выхода объекта на его вход, целиком или частично, в неизменном или преобразованном виде. Если объект регулирования можно расчленить на несколько связанных между собой элементов, то в принципе в такой системе наряду со всеохватывающей главной обратной связью могут существовать и местные (иначе называемые дополнительными) обратные связи, охватывающие только один или несколько элементов. В цепи обратной связи и включаются параллельные корректирующие звенья.
В зависимости от того, с каким знаком подается сигнал, представляющий выходное воздействие обратно на вход элемента, охваченного обратной связью, различают положительную и отрицательную обратные связи.
В зависимости от вида параллельного корректирующего звена различают жесткую и гибкую обратные связи. Жесткая обратная связь действует как во время переходных процессов, так и в установившихся режимах. Гибкая обратная связь действует только во время переходных процессов, а во время установившихся режимов действие такой обратной связи прекращается.
Иными словами, применение гибких обратных связей позволяет изменять постоянные времени охваченных ею элементов при неизменном коэффициенте усиления. Положительная гибкая обратная связь используется для форсирования переходных процессов, в частности для придания им лавинообразного характера, а отрицательная — для демпфирования и замедления переходных процессов.
Практически гибкая обратная связь может быть реализована дифференцирующим контуром, подобным уже рассмотренному, но включенному не последовательно с объектом регулирования, а параллельно ему или некоторым его компонентам.
Электрические гибкие обратные связи обычно реализуются с помощью цепей, содержащих емкости или дифференцирующие трансформаторы. Механические гибкие обратные связи, т. е. связи по скорости перемещения рабочего органа, охваченного этой обратной связью, обычно осуществляются с помощью гидравлического амортизатора с подпружиненным штоком. Примером механической гибкой обратной связи может служить гидроамортизатор, используемый в подвеске автомобиля. В таком амортизаторе усилие, которое требуется для перемещения его штока, определяется скоростью этого перемещения: для быстрого перемещения штока необходимо приложить большое усилие, а для медленного — небольшое. Схематически устройство амортизатора показано на рис. 13.11.
Такой амортизатор представляет собой герметический цилиндр, заполненный рабочей жидкостью (маслом). Эта рабочая жидкость может при движении поршня перетекать из полости, расположенной справа от него, в полость, расположенную слева, и наоборот, через отверстие (или несколько отверстий) в этом поршне. Благодаря пружине поршень находится в среднем, равновесном состоянии. В случае приложения усилия к штоку поршень будет перемещаться, но скорость его перемещения будет ограничиваться скоростью перетекания масла через отверстия в поршне из одной рабочей полости в другую. Скорость же перетекания масла при неизменном гидравлическом сопротивлении отверстия в поршне будет определяться усилием, приложенным к штоку. И, наоборот, усилие, приложенное к што;
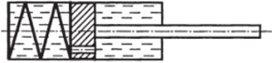
Рис. 13.11. Конструктивная схема гидравлического амортизатора ку, будет определяться скоростью перетекания масла из одной полости в другую.
В результате действия отрицательной гибкой обратной связи, охватывающей, например, такое звено как усилитель, требуемое значение сигнала ошибки на входе этого усилителя устанавливается не тогда, когда ошибка регулируемого параметра достигнет нулевого значения, а когда нулевого значения достигнет отклонение заданной скорости его изменения от фактического значения этой скорости. Этот момент может наступить раньше, поэтому переходный процесс может закончиться раньше, чем при отсутствии такого корректирующего звена.