Тяговые электрические двигатели переменного тока.
Конструктивное исполнение.
Электромеханические характеристики

Этим определяется повышенная склонность синхронного двигателя к колебаниям, для устранения (или снижения) которой реальные синхронные двигатели снабжаются демпферной или пусковой короткозамкнутой обмоткой. Эта обмотка выполняется в виде беличьей клетки на полюсах ротора и при возникновении колебаний скорости ротора, т. е. скольжения, создаст асинхронный момент. Пренебрегая влиянием… Читать ещё >
Тяговые электрические двигатели переменного тока. Конструктивное исполнение. Электромеханические характеристики (реферат, курсовая, диплом, контрольная)
На подвижном составе для нужд электрической тяги довольно широко применяются как двигатели постоянного тока, так и двигатели переменного тока. В настоящее время преимущественное распространение получили трехфазные асинхронные машины с короткозамкнутым ротором, в меньшей степени — синхронные.
Поскольку питание двигателей переменного тока в подавляющем большинстве случаев осуществляется от источника постоянного тока, для обеспечения электромагнитной совместимости источника с потребителем используются преобразователи, речь о которых пойдет в следующей главе. Здесь же будем считать, что питание машин осуществляется от трехфазной сети.
На электроподвижном составе тяговые асинхронные электродвигатели должны обеспечивать и режим пуска, и режим торможения.
Чтобы пояснить принцип их работы в этих режимах, воспользуемся рис. 3.16. На рис. 3.16, а показана асинхронная машина, работающая в двигательном режиме. В асинхронной машине трехфазная обмотка возбуждения 2, уложенная в равномерно распределенные по окружности статора 1 пазы, создает магнитное поле, вращающееся по направлению часовой стрелки с частотой п. В равномерно распределенных по поверхности ротора 3 пазах уложены проводники обмотки ротора 4, замкнутые между собой накоротко по торцам ротора. В соответствии с «правилом правой руки» в пересекаемых бегущим магнитным полем проводниках ротора индуцируется ЭДС, под действием которой в них протекает активная составляющая тока в направлениях, условно обозначенных крестиками и точками. На проводники с током, расположенные в магнитном поле, действуют силы, направление которых определяется по «правилу левой руки». Суммарные усилия F^ приложенные к проводникам ротора, образуют момент, заставляющий ротор вращаться в том же направлении, в котором вращается магнитное поле машины. При этом очевидно, что реализация режима возможна лишь при соблюдении условия п > п2.
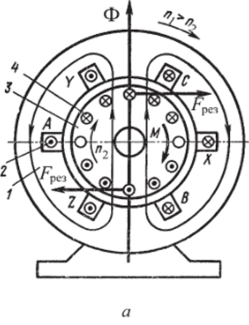
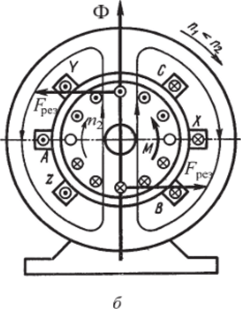
Рис. 3.16. Струкгурные схемы тягового асинхронного двигателя в режимах пуска (а) и торможения (б).
В режиме торможения в условиях сохранения ротором направления вращения изменить направление момента можно, изменив направления тока в обмотках ротора, что достигается снижением частоты вращения поля машины по сравнению с частотой вращения ротора, т. е. при п < а?2*.
В качестве примера на рис. 3.17 показано конструктивное исполнение асинхронного двигателя с короткозамкнутым ротором общепромышленного применения. В корпусе 1 электрической машины устанавливается шихтованный сердечник статора 2, в пазах которого уложена обмотка возбуждения 5. В пазах шихтованного сердечника ротора 3 уложена обмотка ротора 4, выполняемая из алюминия или меди. В качестве проводников обмотки ротора используются стержни, концы которых ввариваются в короткозамыкаюшие кольца, образуя так называемую «беличью клетку». Для охлаждения ротора машины в его теле сделаны вентиляционные каналы, а на вал насажен вентилятор ротора 6. Вал ротора вставлен в подшипник щита 7, крепящегося на корпусе машины. Для охлаждения корпуса предусмотрен вентилятор 9, защищенный от попадания инородных тел кожухом 8.
Рис. 3.17. Конструктивное исполнение асинхронного двигателя с короткозамкнутым ротором.
Для построения механических характеристик трехфазного асинхронного двигателя воспользуемся, как и в случае машин постоянного тока, представлением его в виде варианта двухфазной обобщенной электрической машины [8] (рис. 3.18, а).
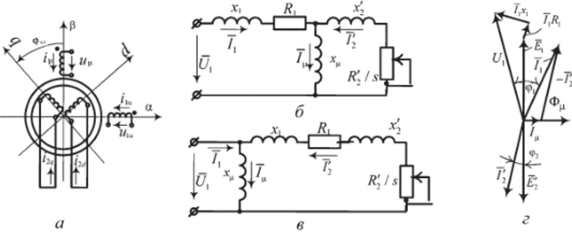
Рис. 3.18. Двухфазная модель и схема замещения фазы асинхронного.
двигателя В общем случае (при рассроченных обмотках ротора) динамика обобщенной машины описывается четырьмя уравнениями электрического равновесия в цепях ее обмоток с помощью уравнения Кирхгофа:
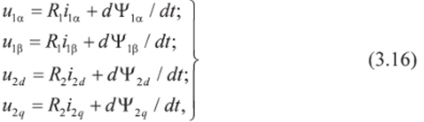
где R и R2 — активное сопротивление фазы статора и приведенное активное сопротивление фазы ротора соответственно.
Погокосцепление каждой обмотки в общем виде определяется результирующим действием токов всех обмоток машины:
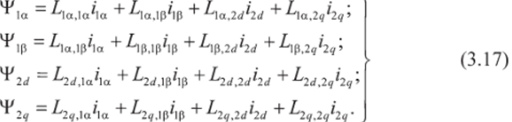
В системе уравнений (3.17) первый индекс в выражении Ьц укатывает, в какой обмотке наводится ЭДС, а второй — каким током.
При работе машины взаимное расположение обмоток статора и ротора изменяется, поэтому собственные и взаимные индуктивности обмоток в общем случае становятся функцией электрического угла поворота ротора — Ljj =У (ф,.ч) — Для симметричной неявнополюсной машины собственные индуктивности обмоток статора и ротора не зависят от положения ротора:
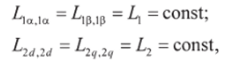
а взаимные индуктивности между обмотками статора или ротора равны нулю: 
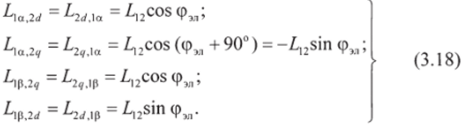
поскольку магнитные оси этих обмоток сдвинуты между собой на угол <�р = 90° эл. Взаимные индуктивности обмоток статора и ротора при повороте ротора на угол <�рХ1 = 2л проходят полный цикл изменений, поэтому справедливы выражения:
Известное дифференциальное уравнение электромеханического преобразования энергии [8].

с учетом (3.18) может быть преобразовано к виду 
Согласно [8] в результате преобразования системы уравнений (3.6) с приведением реальных переменных ротора, выраженных в осях dy qy к осям а, р она приобретает вид.
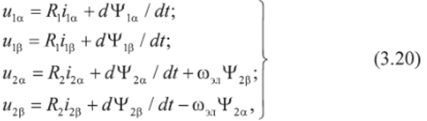
где (c)адЧ'га и ЮэлЧ’гэ «ЭДС вращения.
Приведение переменных статора к осям ротора dy q позволяет получить систему уравнений.
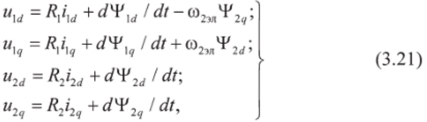
где (c)2эл = (c)<�ьл ~ - частота вращения ротора, с которой изменяются переменные в статорной и роторной обмотках.
Согласно [8] переменные обобщенной машины (потокосцепления, напряжения, токи), представленные проекциями на соответствующие оси, могут быть заменены векторами, описываемыми в комплексной форме. Полагая, что оси абсцисс (а и d) отображают действительную, а оси ординат (р и q) — мнимую составляющие векторов, системы уравнений (3.19) — (3.21), описывающие динамическую механическую характеристику асинхронной машины, можно преобразовать к виду.
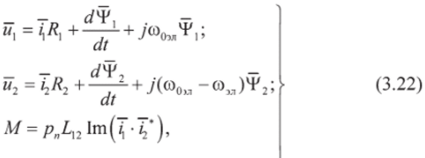
где i2* - величина, комплексно-сопряженная с величиной ^ .
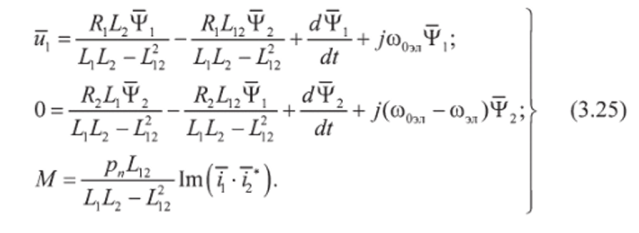
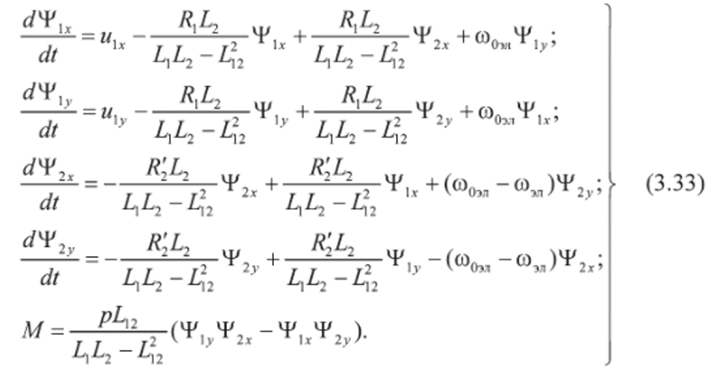
Применительно к асинхронному двигателю с короткозамкнутым ротором математическая модель (3.22) принимает вид.
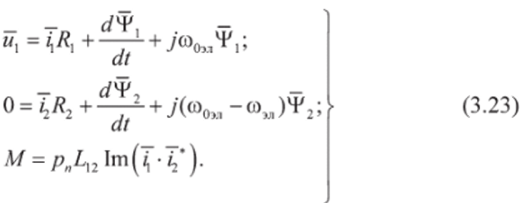
Учитывая, что потокосцепления Ч*, и Ч7, можно выразить через токи и параметры машины согласно выражениям.
+ и (3.24).
систему уравнений (3.23) можно преобразовать к виду, удобному для построения ее структурной схемы:
Для построения механических характеристик двигателя используем схему замещения, приведенную на рис. 3.18, б [8]. Здесь х2 и R2 Is — приведенные к первичной цепи (статора) соответственно индуктивное и активное сопротивления фазы ротора.
В соответствии со схемой замещения фазы машины намагничивающий ток машины 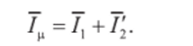
С учетом (3.25) выражение (3.24) можно представить в виде.

где Ца = L, — ?,2, 1^а = L2 - Ln — индуктивности рассеяния статорной и роторной обмоток соответственно.
Поскольку в статическом режиме d4f^/dt = dKV2ldt = 0, первые два уравнения системы (3.23) можно представить в виде.

где хх = со0 м11о; х2 = co0mZ,2o; д:ц = со0эл112″ 5 = (®ом «^ ®о>л =
= (со0-со)/со0.

В уравнениях (3.27) /цне что иное, как ЭДС фазы двигателя:
С учетом этого система уравнений (3.27) запишется так:

Пренебрегая падением напряжения на статорной обмотке от тока намагничивания, схему замещения фазы можно представить в виде, показанном на рис. 3.18, в.
Векторная диаграмма, соответствующая полученной системе, приведена на рисунке 3.18, г.
Для определения статической характеристики двигателя воспользуемся выражением для тока фазы ротора, которое может быть найдено через параметры машины на основе схемы замещения, приведенной на рис. 3.18, в:
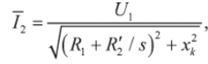
где хк = х] + х2 — индуктивное сопротивление короткого замыкания.
бб Активная электромагнитная мощность, передаваемая через воздушный зазор ротору, определяется как.

Отсюда выражение момента через параметры двигателя:

Задаваясь значениями 5, можно построить характеристику М (со), которая имеет вид, показанный на рис. 3.19, а. Механическая характеристика имеет максимум момента при угловой скорости со = = (0,8…0,9)соо; при со = со0 крутящий момент М= 0, а при со = О М = = (0,3…0,7)Л/Макс.
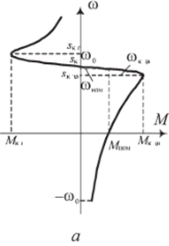
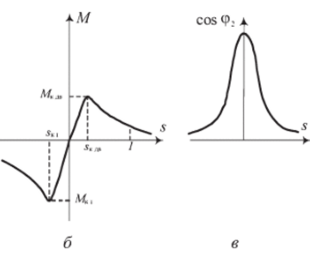
Рис. 3.19. Характеристики асинхронного двигателя.
Критическое значение скольжения, которому соответствует максимальная величина крутящего момента, может быть определено приравниванием нулю производной выражения (3.30) по скольжению:

При этом 
Зависимость момента от скольжения описывается формулой Клосса [8], которая может быть получена в результате преобразований с использованием выражений (3.31) и (3.32):
где а = /?, / /?2 •.
Анализ формулы показывает, что при s «: sK характеристика близка к линейной: М = 2MKs/sK; при s «sK — носит гиперболический характер: М— 2M*sK/s. При отрицательных значениях скольжения (в генераторном режиме) зависимость имеет такой же характер, но величина экстремума больше и может быть определена согласно.

где |.ук| - модуль критического скольжения.
Кривая зависимости M (s) показана на рис. 3.19, б.
Одним из важных показателей работы тягового двигателя является cos ф2, определяющий эффективность работы машины. Зависимость cos ср2 =J (s) можно найти, используя рис. 3.18, б:

Кривая зависимости приведена на рис. 3.19, в.
Поскольку транспортное средство, оснащенное асинхронным двигателем, движется с нулевой скорости и до максимально допустимой, следует рассмотреть, каким образом из естественных характеристик можно получить искусственные, обеспечивающие плавный пуск его во время разгона.
В соответствии со схемами замещения характеристики могут различаться при изменении:
- • величины питающего напряжения;
- • параметров цепи статора;
- • частоты питающего напряжения;
- • параметров цепи ротора.
В пределах рабочего участка механической характеристики ЭДС двигателя приблизительно равна напряжению источника питания и можно записать:

В соответствии с приведенным выражением при постоянстве частоты изменение величины питающего напряжения приводит к изменению потока в машине, т. е. тока намагничивания. Так как величина потока в машине определяется током намагничивания /м, а на холостом ходу /хх ~ /м0 — (0,25…0,35) /i"OM, то увеличение питающего напряжения может привести к возрастанию тока до значений, превышающих номинальный ток двигателя и его нагреванию до недопустимых температур даже без совершения полезной работы. Кривые искусственных характеристик при пониженных напряжениях показаны на рис. 3.20, а.
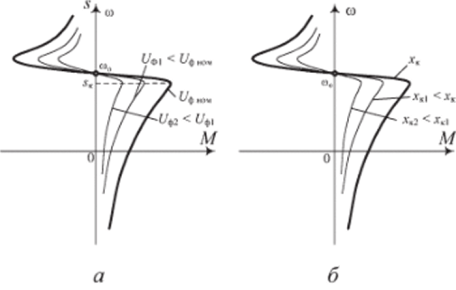
Рис. 3.20. Искусственные характеристики асинхронного двигателя.

Тяжелый режим работы тягового двигателя особенно на городском транспорте, где количество циклов пуска-торможения достигает 100… 120 в час при больших пусковых моментах, привел к необходимости разработать асинхронные двигатели с короткозамкнутым ротором, обладающие повышенным пусковым моментом: двигатели с двойной беличьей клеткой и роторы с глубокими пазами.
Ротор двигателя с двойной беличьей клеткой изображен на рис. 3.21, я. В пазах сердечника ротора 3 расположены пусковая 2 и рабочая 1 клетки, стержни которых объединены короткозамыкающими кольцами. Рабочая клетка выполнена из стержней большего сечения и обладает малым активным сопротивлением R2р. Пусковая выполнена из стержней меньшего сечения и поэтому обладает повышенным активным сопротивлением Я2п. В отличие от стержней рабочей клетки, выполненной из меди, для повышения активного сопротивления стержней пусковой клетки они обычно изготавливаются из марганцовистой латуни или бронзы.
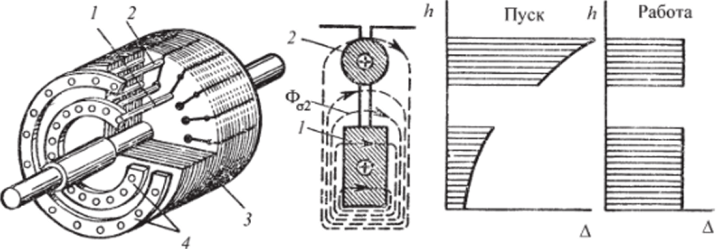
Рис. 3.21. Асинхронный двигатель с двойной беличьей клеткой.
Индуктивные сопротивления клеток определяются значениями потоков рассеяния 20, сцепленных с их стержнями. Пусковая клетка охвачена относительно малыми потоками рассеяния (см. рис. 3.21, б) и поэтому обладает малым реактивным сопротивлением х2п. Рабочая же клетка, охваченная большим потоком рассеяния, имеет большое реактивное сопротивление дг2Р.
Поскольку обмотки оказываются включенными параллельно, распределение тока ротора в них обратно пропорционально величинам их полных сопротивлений, т. е.

При трогании, когда s = 1 и частота в роторе максимальна, индуктивные сопротивления обмоток во много раз превышают их активные сопротивления и большая часть тока ротора течет через пусковую клетку, а поскольку она имеет большое активное сопротивление, создается повышенный пусковой момент.
По мере разгона уменьшается скольжение s и падает частота f2, что приводит к уменьшению реактивных составляющих сопротивлений пусковой и рабочей клеток, и токи в стержнях перераспределяются таким образом, что после достижения номинальной скорости вращения основная часть тока ротора течет через рабочую обмотку в соответствии с отношением.
Картина распределения плотности тока, А в стержнях рабочей и пусковой клеток на начальной и конечной стадиях разгона двигателя показана на рис. 3.21, в.
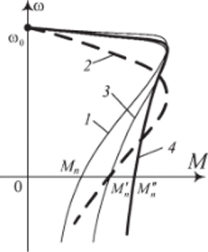
Рис. 3.22. Характеристики асинхронного двигателя с ротором различного исполнения.
Аналогичная картина наблюдается в асинхронных двигателях с глубокопазными роторами. Отличие заключается только в том, что перераспределение тока в стержнях происходит между слоями, а не клетками.
Магнитный поток рассеяния ротора в асинхронных двигателях с повышенным пусковым моментом по сравнению с двигателем обычного исполнения увеличен, поэтому cos ф2 у них несколько меньше.
Кроме того, они обладают и меньшей перегрузочной способностью.
На рис. 3.22 приведены характеристики асинхронных двигателей с короткозамкнутым ротором различного исполнения, откуда видно, что изменить характеристику / двигателя нормального исполнения можно увеличением активного сопротивления стержней беличьей клетки ротора (кривая 2), изменением глубины паза в роторе (кривая 3), а также применением двойной беличьей клетки (кривая 4).
Для изучения динамических свойств тяговых асинхронных двигателей с короткозамкнутым ротором целесообразно использовать структурную схему, построенную на базе математической модели, полученной из системы уравнений (3.25). Для представления математической модели в удобном для разработки структурной схемы виде выполним некоторые преобразования, а именно перейдем от комплексной формы изображения переменных к изображению в ортогональной системе координат с осями хну. Тогда производные потокосцепления в проекциях на эти оси будут иметь вид.
Из анализа структурной схемы электромеханического преобразования энергии в асинхронном двигателе при питании от источника напряжения (рис. 3.23) следует, что при заданной скорости вращения ротора со величина момента зависит от управляющих воздействий соо*, и и,. Для обеспечения требуемого процесса разгона подвижного состава при пуске необходимо установить определенную взаимосвязь между управляющими воздействиями, которую называют законом частотного управления.
Для установления этой связи воспользуемся первым уравнением системы (3.23). Для любой точки рабочей части механической характеристики двигателя можно считать, что отклонения скорости от значения, определяемого статической характеристикой, малы, а изменения токов не вызывают существенных изменений потока. Тогда справедливо положить dyV] / dt = 0 и уравнение преобразуется к виду 
Если пренебречь падением напряжения на активной составляющей сопротивления фазы в силу его малости (/^ ~ 0), то для поддержания неизменным значения потокосцепления необходимо изменять величину питающего напряжения в соответствии с изменением частоты по закону.

т. е. U]/f = const.
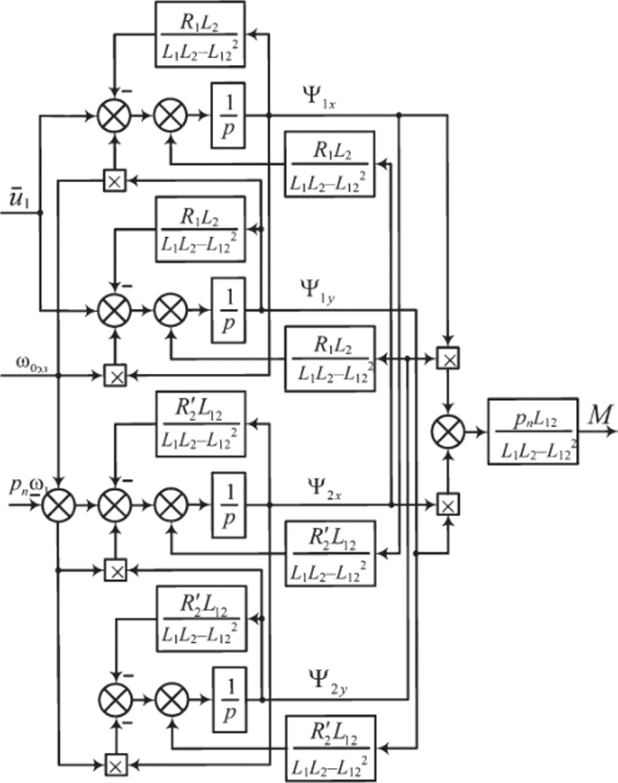
Рис. 3.23. Структурная схема асинхронного двигателя, питающегося от источника напряжения.
Анализ выражения (3.34) показывает, что, во-первых, снижение частоты питающего напряжения приводит к уменьшению величины (Do и, во-вторых, при f = О потокосцепление также становится равным 0. Кроме того, понижение частоты приводит к необходимости учитывать активную составляющую сопротивления фазы, величина которой в процентном отношении с уменьшением частоты растет и пренебрежение ею становится недопустимым.
Согласно [8] кривые искусственных характеристик при понижении частоты питающего напряжения имеют вид, представленный на рис. 3.24. Пунктирной линией обозначены характеристики без учета активного сопротивления фазы.
При использовании для питания асинхронного тягового двигателя инвертора тока уравнения механической характеристики (3.23) вследствие того, что.

приобретают вид.
где потокосцепления обмоток могут быть выражены через гоки как.

Подставляя потокосцепления в первое уравнение и разрешая его относительно тока ir2y, получаем.

где .?к| = /?2 / х'1хх — критическое скольжение для случая питания от источника тока;
7, = L2 / R'2 = 1 / со0ы1 HOMsKl — электромагнитная постоянная двигателя при питании от источника тока; 
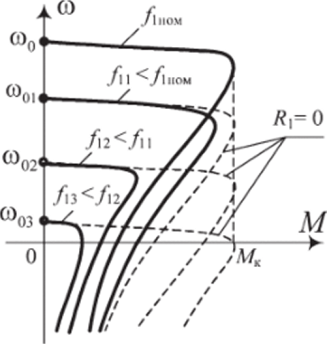
Рис. 3.24. Характеристики асинхронного двигателя при понижении частоты питающего напряжения.
Полагая опять, что для любой точки рабочей части механической характеристики двигателя можно считать, что отклонения скорости от значения, определяемого статической характеристикой малы, а изменения токов не вызывают существенных изменений потока, подставляем во второе уравнение системы (3.35) выражение (3.36) и получаем.
Подставляя (3.37) и последнее уравнение системы (3.35), получаем выражение для механической характеристики двигателя:
где А/., =Я"/,т«^и/2ю0|юи.
Для анализа статических характеристик двигателя, питающегося от источника тока, воспользуемся системой уравнений электрического равновесия (3.27), которая в этом случае преобразуется к виду.

Системе уравнений (3.39) соответствует схема замещения фазы, приведенная на рис. 3.25, а.
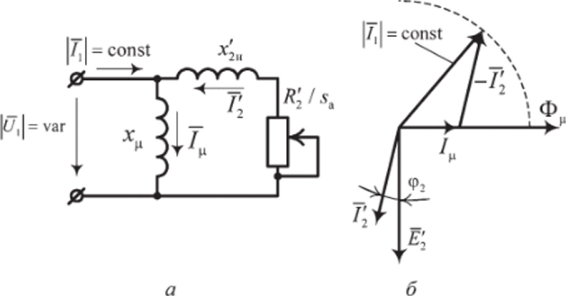
Рис. 3.25. Схема замещения фазы асинхронного двигателя, питающегося от источника тока.
В соответствии со схемой замещения токи, протекающие по цепям, определяются по выражениям:
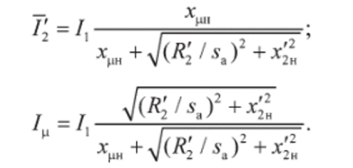
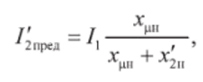
Зависимости Г2 = J[sa) и / = J[sa)9 соответствующие этим выражениям, показаны на рис. 3.26. Из зависимостей видно, что при увеличении скольжения ток ротора Г2 нарастает, стремясь к предельному значению.
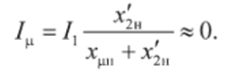
а ток намагничивания, который при .уа = 0 равен току /ь при этом уменьшается, стремясь к значению.
При анализе характеристик асинхронного двигателя, питающегося от источника тока, необходимо учитывать влияние насыщения магнитной цепи двигателя [8]. Кривая намагничивания представлена на рис. 3.26, б, там же построена кривая д;и = Д/ц), соответствующая данной кривой намагничивания. Для анализа формы статических характеристик с приближенным учетом насыщения характеристика Фц = Д/ц) аппроксимирована двумя прямыми. При /ц</<sub>ц"ас магнитная цепь машины не насыщена и *ц = хцн = const (прямая /). Если /и> /ц«ас, насыщение сказывается существенно и приближенно можно принять Фм = Фм нас = const (прямая 2 на рис. 3.26, б).
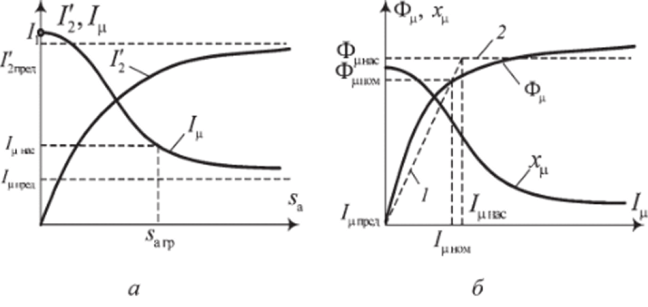
Рис. 3.26. Зависимости параметров асинхронного двигателя при питании от источника тока.
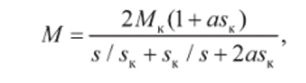
Так как /ц < /ь то при / < /инас магнитная цепь двигателя при любых скольжениях не насыщается и хШ1 = const. В этой области значений /i статические механические характеристики двигателя описываются уравнением (3.38) при р = 0:

На рис. 3.27, а показано семейство характеристик со = ДА/), соответствующих ряду значений частоты f при /i</<sub>MIiac Так как зависимость M=fisa) в выражении (3.40) инвариантна относительно частоты, то при изменении f изменяется только скорость идеального холостого хода о)0 = 2nf]/pn, а форма механических характеристик относительно этой точки не претерпевает изменений. Особенностью этих характеристик является малость критического скольжения sK по сравнению с sKi соответствующим питанию от источника напряжения, обусловленная тем, что лгцн «х]н + л:'2нОднако при /]</<sub>цнас невелико и значение Мк. Поэтому для получения требуемой перегрузочной способности, аналогичной перегрузочной способности на естественной характеристике, в режиме питания от источника тока необходимо выбирать значения /ь превышающие /цнас в несколько раз.
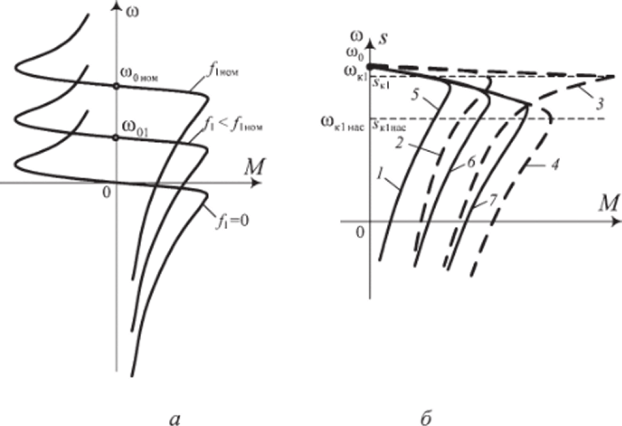
Рис. 3.27. Механические характеристики асинхронного двигателя при питании от источника тока.
При 1 «/цнас и идеальном холостом ходе магнитная цепь машины находится в глубоком насыщении, поэтому при малых значениях $а можно без большой погрешности принять Фи = Фи ||ас = const. С ростом скольжения намагничивающий ток /м уменьшается, однако в соответствии с принятой аппроксимацией до значения sA = sa при котором 1 = /и «ас, насыщение сохраняется. В области больших скольжений (•Уа>^агр), как показано на рис. 3.26, а, ток 1 </<sub>ц мас, а возрастает и приближенно может быть принято равным хм» (рис. 3.26, б).
Принятая аппроксимация кривой намагничивания позволяет приближенно оценить вид механической характеристики на рабочем участке. При насыщении Ф" = Фм нас= const и ЭДС Е достигает значений, близких к (У,"омС учетом этого для режима насыщения можно принять Е — U «ом = const и представить (3.40) в виде.

где Л/к1|1ас =3UUt0H /2cd0iiomjc2ii; skUuc = ^ хъг
Проведенный анализ влияния насыщения позволяет представить реальную форму механических характеристик при различных значениях /|. На рис. 3.27, б приведены механические характеристики 1−3, соответствующие токам /| 1 = /и нас, 12 > /" «ас и /13 > /|2, которые построены по (3.40) без учета насыщения. Там же показана механическая характеристика 4 для насыщенного состояния магнитной цепи, определяемая (3.41). Реальные механические характеристики (кривые 5−7) в области насыщения (sa < sa гр) совпадают с кривой 4, а при отсутствии насыщения (sa > sa гр) приближаются к соответствующим кривым 1−3.
Граничное скольжение sa ,v при 1 = 1 равно н>глю и с возрастанием тока 1 увеличивается. Соответственно при /п =/и нас магнитная цепь машины не насыщается при любых скольжениях и кривая / сливается с соответствующей реальной характеристикой 5. С увеличением 1 и возрастанием sirv увеличивается зона, где механические характеристики совпадают с кривой 4, а зона, в которой они совпадают с рассчитываемыми без учета насыщения, постепенно сокращается. Согласно рис. 3.27, б это приводит к постепенному увеличению критического скольжения.
Трехфазные синхронные двигатели, как правило, исполняются с явнополюсным ротором в двух вариантах:
- • с размещением на нем обмотки возбуждения, питание которой осуществляется через контактные кольца от источника постоянного напряжения;
- • на постоянных магнитах.
Трехфазная обмотка статора получает питание от сети переменного тока.
Двухфазная модель такой машины представлена схемой на рис. 3.28, а.
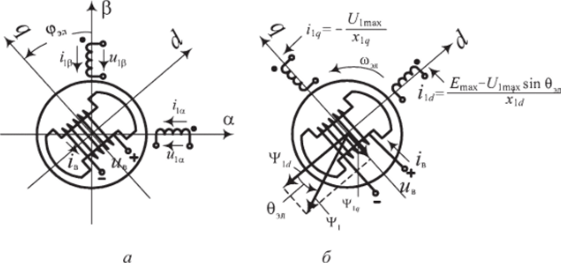
Рис. 3.28. Двухфазная модель синхронной машины.
Здесь обмотки фаз статора питаются симметричной двухфазной системой напряжений.

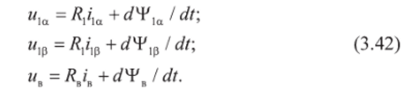
Обмотка возбуждения размещена на оси d явнополюсного ротора и подключена к источнику постоянного напряжения иъ. Уравнения электрического равновесия в цепях двигателя, записанные для реальных переменных в осях а, (3, d, q, имеют вид.
Особенность рассматриваемого двигателя — синхронное вращение ротора с вращающимся полем статора.
При работе в двигательном режиме ротор отстает от поля статора на угол 0ХЛ = (роэл — фэл = соох" t — ф™, поэтому наиболее удобный для анализа вид уравнений получается в осях d, q. Вначале преобразуем напряжения //]U, uQ к осям d, q с помощью формул прямого преобразования [8]: 

где 0ЭЛ = (p0w — (рэл = со0/ - (рэл — угол отставания ротора от поля статора.
По аналогии с (3.21) с учетом полученных выражений для иц и система уравнений (3.42) может быть представлена как математическая модель синхронного двигателя в виде.
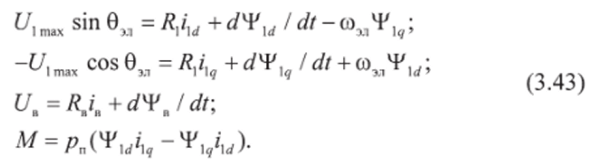
Схема синхронного двигателя в осях d, с/ показана на рис. 3.28, 6. В соответствии с этой схемой с учетом того, что вследствие явнополюсности ротора Ld Ф LQ и Ьш ф Ьъ, уравнения потокосцеплений имеют вид.

Положив в (3.43) dldt = 0 и соЭл = и пренебрегая активным сопротивлением статора R «0, примем, что обмотка возбуждения получает питание от источника тока и во всех режимах /в =-/в = const. Тогда система (3.43) примет вид.

откуда.

Подставляя выражения токов в третье уравнение (3.44) и учитывая, что L2dh = ?"акс/о)<�ьл, после преобразований получаем уравнение угловой характеристики двухфазного явнополюсного синхронного двигателя в виде.

Произведя замену переменных двухфазной машины переменными трехфазной согласно [8] и перейдя к эффективным значениям ЭДС и напряжения, получим известное уравнение угловой характеристики трехфазного явнополюсного синхронного двигателя:

Из уравнения видно, что электромагнитный момент синхронного двигателя состоит из двух составляющих, первая из которых обусловлена взаимодействием вращающегося поля статора с полем возбужденного ротора, а вторая представляет собой реактивный момент, обусловленный явнополюсным исполнением ротора. Вследствие явнополюсности энергия магнитного поля максимальна при любом из двух возможных соосных с полем статора положений ротора, что и определяет зависимость реактивного момента от двойного угла 05Л.
Примерный вид угловой характеристики М=Д0эл) показан на рис. 3.29. Из рисунка видно, что с увеличением угла 0ЭЛ электромагнитный момент в начале кривой растет почти линейно. При углах 0эл > 45° темп нарастания момента быстро снижается, и после достижения максимума М,дальнейшее возрастание угла 0ЭЛ влечет за собой уменьшение момента двигателя. Без учета явнополюсности ротора максимум момента наступает при 0ЭЛ = 90°.
В номинальном режиме работы, когда двигатель развивает номинальный электромагнитный момент tV/hon, угол 0М обычно составляет Омном = 20…30°. Этим обстоятельством определяется перегрузочная способность синхронного двигателя, которая лежит в пределах Х = Мпах/Мюм = 2…3. Из рис. 3.29 видно, что реактивный момент увеличивает крутизну рабочего участка угловой характеристики и несколько повышает перегрузочную способность двигателя.
Для пояснения механизма образования синхронного момента воспользуемся рис. 3.25, б. На этом рисунке обозначены все токи, определяющие направление вектора потокосцепления статора 4^, связанного с осью вращающегося магнитного поля машины. Вектор *? — эго геометрическая сумма потокосцеплений обмотки статора по осям d и q

В соответствии с (3.45) на рисунке показаны зависимости токов 1и и /и, от угла 0)Л.
При идеальном холостом ходе = 0 и вектор У, совпадает с осью ротора d. Под нагрузкой ось ротора d и составляющая вектора потокосцепления 4/1Л которая в основном обусловлена током возбуждения, отстают от оси вращающегося магнитного поля, определяемой положением вектора 4х, на угол 0Х1. Между постоянным магнитом, которым является возбужденный ротор, и вращающимся магнитным полем возникают силы взаимодействия. При малых углах 0,л эти силы при увеличении 0ЭЛ возрастают по закону, близкому к линейному. Нетрудно видеть, что рассмотренное электромагнитное взаимодействие вполне подобно механической упругой связи между полем ротора и результирующим полем машины. Поэтому по главным динамическим свойствам синхронный двигатель подобен упругим механическим системам.
Рабочий участок угловой характеристики Л/=Д05Л) можно с достаточной для многих задач инженерной практики точностью заменить линейной зависимостью М = ?0ЭЛ, проходящей через точку номинального режима:

Рис. 3.29. Угловая (а) и механическая (б) характеристики синхронной машины где сом — коэффициент жесткости упругой электромагнитной связи двигателя.
При дифференцировании (3.46) получаем приближенное уравнение динамической характеристики.

которое повторяет известное из механики соотношение, используемое для характеристики жесткости связи между двумя массами при передаче крутящего момента: 
откуда.

Этим определяется повышенная склонность синхронного двигателя к колебаниям, для устранения (или снижения) которой реальные синхронные двигатели снабжаются демпферной или пусковой короткозамкнутой обмоткой. Эта обмотка выполняется в виде беличьей клетки на полюсах ротора и при возникновении колебаний скорости ротора, т. е. скольжения, создаст асинхронный момент. Пренебрегая влиянием электромагнитной инерции на асинхронный момент, результирующий момент синхронной машины в динамических процессах можно приближенно представить в виде суммы синхронного Л/син и асинхронного моментов Л/ас:

где с*эм — МюМ/вном ир — 2 MMosK.