Типовые структуры системы управления импульсными регуляторами
Общие вопросы импульсного регулирования предварительно были рассмотрены в параграфе 3.1, где указаны основные способы импульсной модуляции. Наибольшее распространение в импульсных регуляторах получили широтно-импульсная (ШИМ), частотно-импульсная (ЧИМ) и релейная модуляция. Рассмотрим более подробно структуры систем управления, реализующих эти способы, на примере обобщенной схемы импульсного… Читать ещё >
Типовые структуры системы управления импульсными регуляторами (реферат, курсовая, диплом, контрольная)
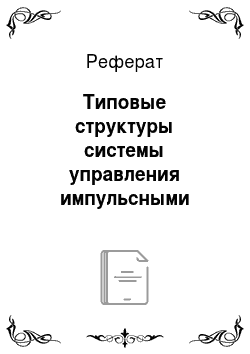
Общие вопросы импульсного регулирования предварительно были рассмотрены в параграфе 3.1, где указаны основные способы импульсной модуляции. Наибольшее распространение в импульсных регуляторах получили широтно-импульсная (ШИМ), частотно-импульсная (ЧИМ) и релейная модуляция. Рассмотрим более подробно структуры систем управления, реализующих эти способы, на примере обобщенной схемы импульсного регулятора (рис. 4.18). Импульсные регуляторы иногда называют ключевыми, поскольку регулирующим элементом является электронный ключ 5, управляемый системой управления СУ, связанной в общем случае с входными и выходными цепями, а также с внешними устройствами.
При ШИМ-регулировании ключ S периодически включается с частотой fs = 1 /Ts и находится в проводящем состоянии в течение времени ?вкл, равного уTs, а остальную часть периода находится в выключенном состоянии (рис. 4.18, б), т. е. время ?выкл = (1 — у)TS. Параметр у называется коэффициентом заполнения, а величину q = 1/у называют скважностью. Коэффициент у может изменяться от 0 до 1.
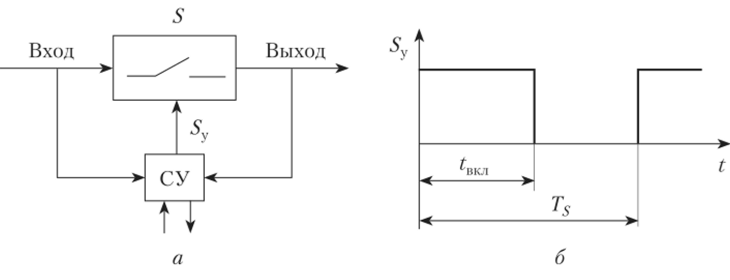
Рис. 4.18. Принцип действия импульсного регулятора постоянного напряжения:
а — обобщенная схема; б — диаграмма сигнала управления Известно много различных структур, реализующих способ ШИМ. Наиболее простая и распространенная структура выполняется по принципу вертикально-фазового управления (рис. 4.19, а). Сигнал Хвых и эталонный сигнал Х0 поступают на сумматор. В качестве Хвых обычно используется выходной сигнал датчика, например среднего значения напряжения или тока на выходе регулятора. Разность сигналов АХ = Хвых — Х0 подается на усилитель У и усиливается последним. Выходной сигнал е усилителя У поступает на компаратор Ком, где сравнивается с сигналом пилообразной формы ипт. Этот сигнал формируется генераторами пилообразного напряжения ГПН и тактовых импульсов ГТИ, который задает рабочую частоту fs коммутации ключа S. При превышении сигналом UTnH уровня 8 на выходе компаратора Ком вырабатывается сигнал f/ynp, который при помощи формирователя импульсов ФИ задает длительность /;вкл интервала включенного состояния ключа S. Соответственно, при изменении сигнала е изменяется временной интервал ?вкл, т. е. выполняется широтно-импульсная модуляция путем изменения коэффициента заполнения у.
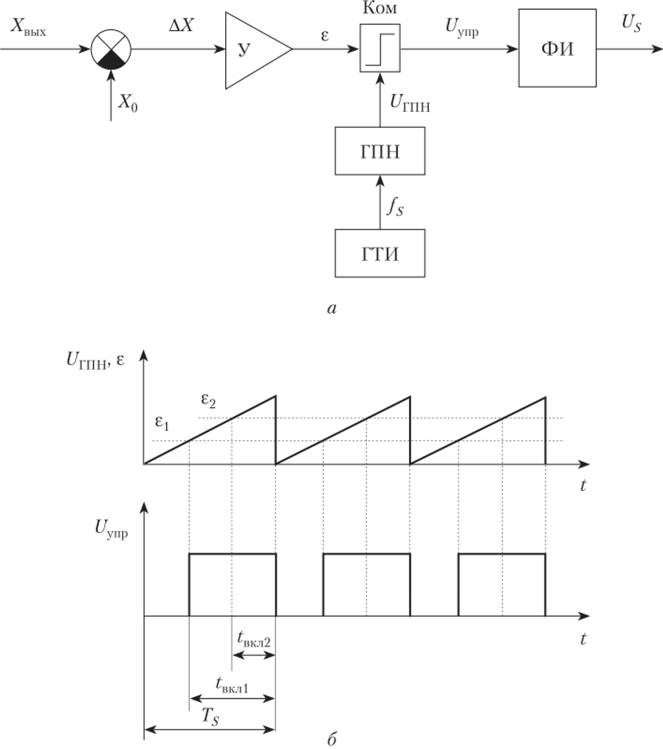
Рис. 4.19. Принцип широтно-импульсной модуляции:
а — структурная схема; 6 — диаграмма сигнала управления При регулировании по способу ЧИМ регулирующим фактором является рабочая частота коммутации ключей импульсного регулятора при постоянном значении ?вкл. Упрощенная структурная схема регулятора с ЧИМ представлена на рис. 4.20. Отклонение контролируемого параметра Хвых от эталонного значения Х0 поступает на усилитель У. Выходной сигнал усилителя 5 определяет частоту fs сигналов генератора переменной частоты ГПЧ. Формирователь импульсов ФИ согласует параметры импульсов ГПЧ с параметрами импульсов управления коммутатором S. При способе ЧИМ изменение частоты fs также приводит к изменению коэффициента заполнения у = tBKJl/Ts, так как длительность импульса ?вкл на выходе ФИ является постоянной.
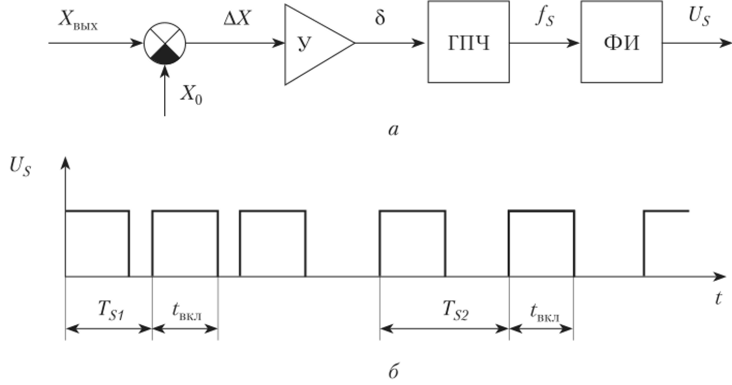
Рис. 4.20. Принцип частотно-импульсной модуляции:
а — структурная схема; б — диаграмма сигнала управления Отдельно следует отметить релейный способ регулирования, который может рассматриваться как сочетание методов ШИМ и ЧИМ. Этот способ находит широкое применение в системах «слежения» за эталонным сигналом при изменении его во времени. На рис. 4.21 приведены упрощенная структурная схема релейного регулирования и диаграммы, иллюстрирующие процессы в регуляторе. Регулируемый параметр Хвых сравнивается с эталонным сигналом Х0 и разность этих сигналов АХ через усилитель У поступает на релейный элемент РЭ, имеющий два явно выраженных состояния выхода У+ и Уи некоторый коэффициент возврата, но входному сигналу. Пороговые значения, при которых происходит переключение по гистерезисной петле, соответствуют ±ДХср. Выходным сигналам РЭ У+ и Усоответствуют сигналы на выходе ФИ, определяющие коммутационное состояние ключа импульсного регулятора. Одно из состояний вызывает увеличение регулируемого параметра, а другое — его уменьшение (рис. 4.21, б). Скорость этих процессов зависит от инерционности всех звеньев регулятора, включая собственно объект регулирования. Если параметры устройства, влияющие на скорость протекания процессов, изменяются, например при изменении нагрузки, то, соответственно, изменяется и частота переключений fs. Также может изменяться и коэффициент заполнения у. Точность регулирования в этой схеме определяется разностью пороговых значений переключения АХср релейного элемента. Пульсации регулируемого параметра, обусловленные коммутацией на частоте /5, отфильтровываются выходным фильтром регулятора.
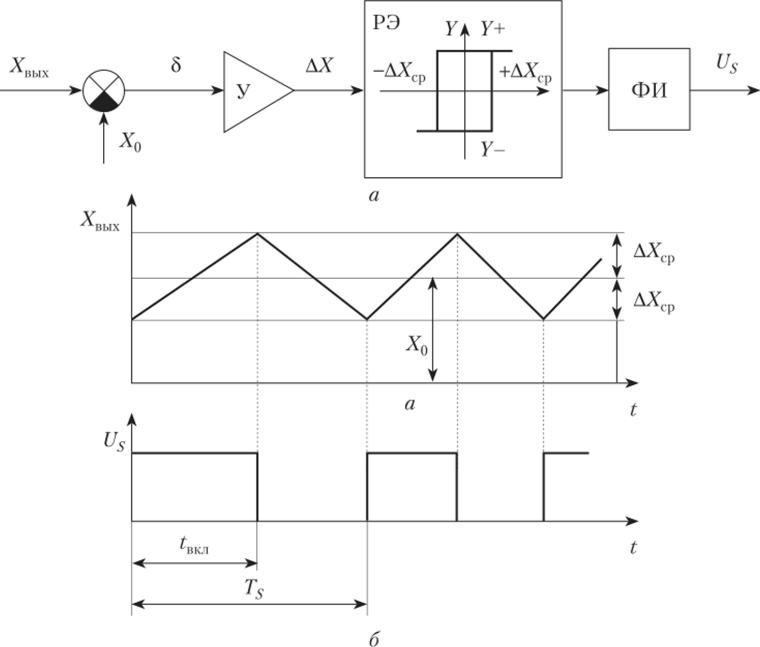
Рис. 4.21. Принцип релейной модуляции:
а — структурная схема; 6 — диаграмма выходного сигнала и сигнала управления.