Микропроцессорные регуляторы автоматических систем и систем автоматического управления
Развитие микропроцессорной техники привело к тому, что в современных СА и САУ блок управления заменяется на микропроцессорное устройство, способное принимать и обрабатывать сигналы с датчиков привода и вырабатывать управляющее воздействие нужной формы на привод. В подобных СА и САУ используется широкая номенклатура частотных преобразователей (инверторов, сервопреобразователей) со встроенными… Читать ещё >
Микропроцессорные регуляторы автоматических систем и систем автоматического управления (реферат, курсовая, диплом, контрольная)
Развитие цифровой электроники, создание ЭВМ, способных решать задачи управления в реальном времени, разнообразие надежных способов передачи данных — все это послужило основой к применению микропроцессорных средств в САУ. Сейчас уже сложно представить технологическое производство без применения микропроцессорных средств сбора, анализа, передачи данных и выработки управляющих сигналов. Применение микропроцессорных средств породило новые тины СА и САУ, в которых сравнением входных и выходных сигналов и выработкой управляющего воздействия занимается одно устройство — программируемый контроллер. Такие устройства обладают модульной структурой, которая позволяет:
- • обрабатывать информацию с датчиков, сравнивать ее с уставкой, задаваемой внешним устройством или запрограммированной в самом контроллере;
- • вырабатывать, согласно запрограммированным законам регулирования, управляющее воздействие на объект управления;
- • передавать данные другим контроллерам.
На данный момент можно выделить три типа микропроцессорных устройств, применяемых в задачах управления и автоматизации:
- 1) промышленные компьютеры (ЭВМ);
- 2) промышленные контроллеры (ПК);
- 3) программируемые логические контроллеры (ПЛК).
Промышленные компьютеры по своему наполнению полностью схожи со стандартными IBM-совместимыми компьютерами.
Программируемые логические контроллеры (ПЛК) — микропроцессорные системы, ориентированные для реализации алгоритмов логического управления, имеют модульную структуру — процессорный модуль, модуль ввода/вывода, модуль связи.
Промышленные контроллеры (ПК) — микропроцессорные системы, ориентированные на локальное управление объектом. Так же, как и ПЛК, промышленные контроллеры имеют модульную структуру.
Промышленные контроллеры можно разделить на три категории: промышленные контроллеры общего назначения (универсальные средства промышленной автоматики), проблемно-ориентированные средства автоматики и встраиваемые в системы автоматики. Последние интегрированы с объектом управления, например, являются управляющей частью станков с числовым программным управлением (ЧПУ). Первые две категории конструктивно выполняются в отдельных, закрытых корпусах, имеющих устройство формирования управляющих воздействий на объект управления (устройство сопряжения с объектом — У СО).
Проблемно-ориентированные промышленные контроллеры предназначены для работы в составе СА и САУ определенными видами выходных параметров управляемого объекта, например: управление частотой вращения синхронного генератора, управление угловым положением некоторого объекта, управление температурой внутри нагревательной печи и т. п. Поэтому ПК в своем составе имеют различные специфические устройства сопряжения с объектом, которые преобразуют управляющий сигнал, вырабатываемый контроллером, в сигнал, непосредственно управляющий объектом.
Примером эффективного использования проблемно-ориентированных ПК могут служить микропроцессорные системы в составе замкнутых частотно-управляемых электроприводов с синхронными и асинхронными исполнительными двигателями. Долгое время в системах управления движением применялись в основном двигатели постоянного тока. Это было связано с тем, что изменения скорости вращения двигателя достаточно просто было добиться изменением напряжения в якорной цепи двигателя. В качестве управляющих устройств использовались магнитные и электромашинные усилители, тиристорные и транзисторные регуляторы. В качестве систем обратной связи по скорости применялись в основном маломощные электрические генераторы (гахогенераторы).
Развитие микропроцессорной техники привело к тому, что в современных СА и САУ блок управления заменяется на микропроцессорное устройство, способное принимать и обрабатывать сигналы с датчиков привода и вырабатывать управляющее воздействие нужной формы на привод. В подобных СА и САУ используется широкая номенклатура частотных преобразователей (инверторов, сервопреобразователей) со встроенными управляющими микропроцессорами, которые подбираются под конкретную мощность исполнительного двигателя. Сами эти преобразователи часто управляются от отдельного универсального ПК. Замкнутая САУ для управления двигателем называется сервосистемой, или сервоприводом. Выпускаются также микропроцессорные системы, в которых совмещены вместе функции частотного преобразователя и устройства, формирующего сигнал управления, т. е. функции формирования сигнала рассогласования и дальнейшего преобразования сигнала (например, реализация ПИД-закона регулирования).
Классическая сервосистема представляет собой любой тин механического привода, имеющий в составе датчик (положения, скорости) и блок управления приводом (электронную схему), автоматически поддерживающий необходимые параметры на датчике (и соответственно на сравнивающем устройстве) согласно заданному внешнему значению (уставке). Таким образом, сервосистема — это САУ с управлением через обратную связь, позволяющая точно управлять параметрами движения (скоростью, угловым положением).
К сервоприводам как к категории приводов относится множество различных регуляторов и усилителей с обратной связью, например гидро-, электро-, пневмоусилители ручного привода управляющих элементов. Однако термин «сервопривод» чаще всего используется для обозначения электрического привода с обратной связью по положению, применяемого в автоматических системах для привода управляющих элементов и рабочих органов объектов автоматизации.
На рис. 4.15 представлена обобщенная функциональная схема сервосистемы на базе ПК, в которой реализуются все вышеперечисленные функции, включая обработку сигнала энкодера, содержащую информацию о частоте вращения вала двигателя и о его угловом положении. Применение энкодера в сочетании с микропроцессорной обработкой его сигнала увеличивает.

Рис. 4.15. Обобщенная функциональная схема сервосистемы
точность всей системы, но сравнению с САУ, в которой используются аналоговые датчики.
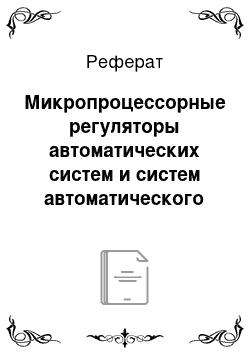
Блок-схема ПК рассматриваемой сервосистемы с микропроцессорным управлением представлена на рис. 4.16. На схеме показаны замкнутые контуры управления по положению и скорости.
Рис. 4.16. Блок-схема сервопривода с микропроцессорным управлением
Сервонреобразователи имеют необходимые коммуникационные интерфейсы для связи с другими контроллерами (контроллерами верхнего уровня) и интерфейс соединения с ПК, через который возможно управление сервопреобразователем со стороны оператора.
Сервонреобразователь может программироваться на различные режимы работы, такие как:
- • внешнее и внутреннее управление положением (позиционный режим — движение по заданной траектории с заданными параметрами);
- • внешнее и внутреннее управление скоростью вращения;
- • внешнее и внутреннее управление моментом;
- • комбинация перечисленных выше режимов.
Для реализации перечисленных режимов в сервопреобразователях запрограммированы законы регулирования (II, ПИ и ПИД), и фактически они становятся программируемыми регуляторами с возможностью управления электронными компонентами частотных преобразователей.