Нечеткое моделирование в среде MATLAB
На рис. 5.11 приведена программа просмотра правил нечеткого вывода. Как следует из рис. 5.11, при значении первой входной переменной «Расстояние», равном 50,5 см, и направлении на помеху «Прямо» активными оказываются два правила — второе и пятое. Результат нечеткого вывода определяется по формуле (5.14): R = R2vRy В данном примере в результате дефаззификации угол поворота руля оказывается равным… Читать ещё >
Нечеткое моделирование в среде MATLAB (реферат, курсовая, диплом, контрольная)
Для реализации процесса нечеткого моделирования в среде MATLAB предназначен специальный пакет расширения Fuzzy Logic Toolbox, содержащий редакторы |7|:
систем нечеткого логического вывода (Fuzzy Inference System Editor или сокращенно FIS Editor);
функций принадлежности (Membership Function Editor);
правил нечеткого вывода (Rule Editor);
просмотра правил вывода Rule Viewer.
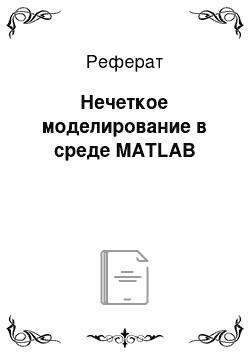
На рис. 5.8 показан графический интерфейс редактора FIS, который позволяет редактировать свойства системы нечеткого вывода, а именно число входных и выходных переменных. Как следует из рис. 5.8, в качестве алгоритма нечеткого вывода используется по умолчанию алгоритм Мамдани, предложенный в 1975 г. английским ученым Е. Мамдани. Суть его заключается в том, что те правила, степень истинности которых отличается от нуля, считаются активными и используются для дальнейших расчетов. Для дефаззификации выходных переменных используется метод центра тяжести по формуле (5.10). Редактор FIS позволяет вызывать все другие редакторы и программу просмотра систем нечеткого вывода.
На рис. 5.9 показан графический редактор функций принадлежности, с помощью которого заданы термы, показанные на рис. 5.5. Функции принадлежности, соответствующие термам «Близко», «Средняя дальность» и «Далеко», обозначены как mfl, mf2 и mf3.
На рис. 5.10 показан редактор правил системы нечеткого вывода. Правила вывода, записанные с помощью этого редактора, совпадают с правилами, приведенными в табл. 5.3. Весовые коэффициенты всех правил, указанные в скобках, приняты по умолчанию равными единице.
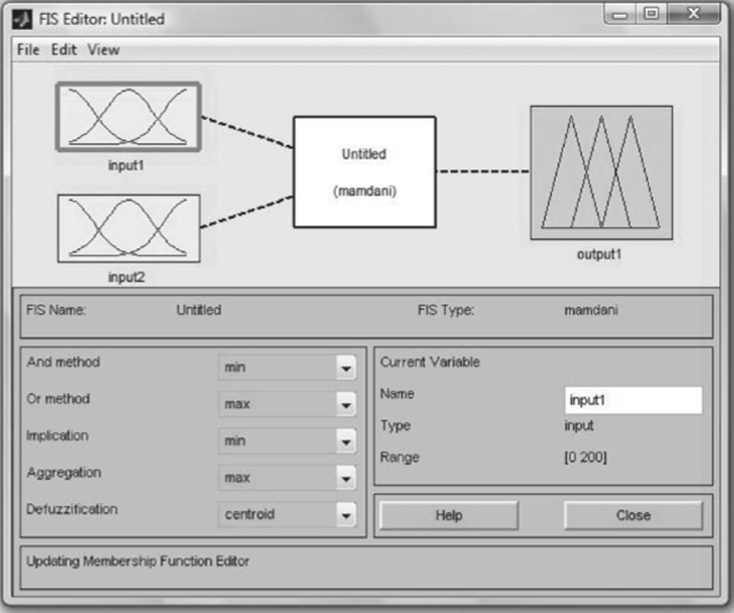
Рис. 5.8. Графический интерфейс редактора FIS.
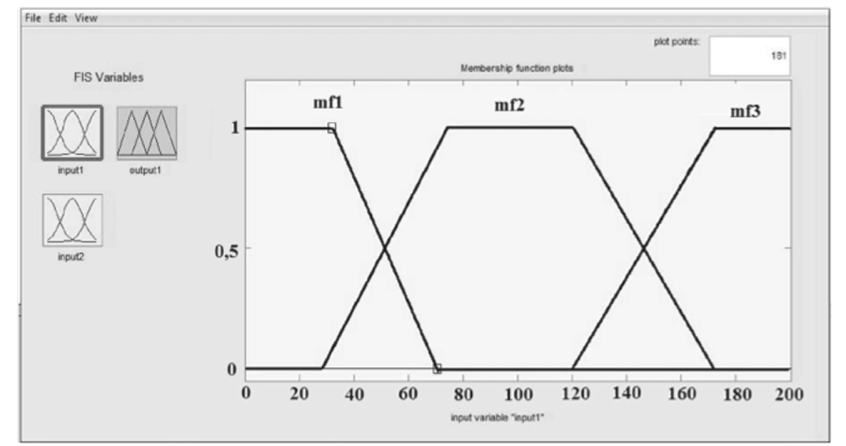
Рис. 5.9. Редактор функций принадлежности.
На рис. 5.11 приведена программа просмотра правил нечеткого вывода. Как следует из рис. 5.11, при значении первой входной переменной «Расстояние», равном 50,5 см, и направлении на помеху «Прямо» активными оказываются два правила — второе и пятое. Результат нечеткого вывода определяется по формуле (5.14): R = R2vRy В данном примере в результате дефаззификации угол поворота руля оказывается равным -49,6°, что совпадает с рис. 5.7. Системы, основанные на нечеткой логике, разработаны и успешно внедрены в таких областях, как управление технологическими процессами, управление транспортом, управление бытовой техникой, медицинская и техническая диагностика, финансовый менеджмент, финансовый анализ, биржевое прогнозирование, распознавание образов, исследование рисковых и критических операций, прогнозирование землетрясений, составление автобусных расписаний, климатический контроль в зданиях.
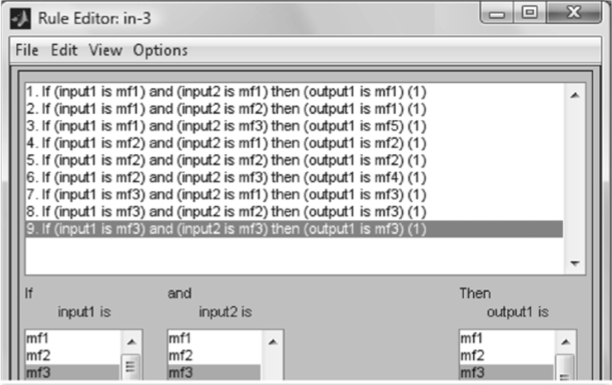
Рис. 5.10. Редактор правил системы нечеткого вывода.
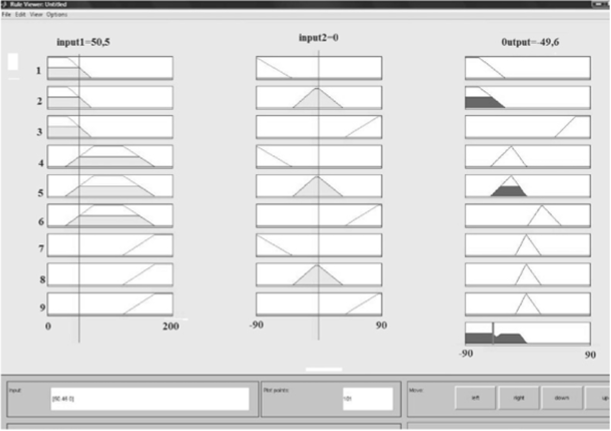
Рис. 5.11. Программа просмотра правил нечеткого вывода.
Коротко перечислим отличительные особенности fuzzy-систем по сравнению с классическими системами автоматического управления:
- • возможность оперировать входными данными, заданными нечетко: например, непрерывно изменяющиеся во времени значения (динамические задачи); значения, которые невозможно задать однозначно;
- • возможность проведения быстрого моделирования сложных динамических систем и их сравнительный анализ с заданной степенью точности;
- • возможность, оперируя принципами поведения системы, описанными fuzzy-методами, не тратить много времени на выяснение точных значений переменных и составление уравнений, которые их описывают.
Использование аппарата нечеткой логики рекомендуется:
- • для очень сложных процессов, когда не существует простой математической модели;
- • для нелинейных процессов высоких порядков;
- • для обработки (лингвистически сформулированных) экспертных знаний.
В заключение отметим, что нечеткое управление реализуется с помощью программируемых логических контроллеров.