Оценка качества процесса регулирования САР
Сокращение времени переходного процесса для улучшения качества регулирования не всегда может быть осуществимо на практике. Например, при регулировании температуры в печи с металлом скорость нарастания температуры в печи определяется мощностью нагревательного устройства, которая имеет определенный предел. Следовательно, максимальная скорость нагрева печи с металлом будет ограничена этим пределом… Читать ещё >
Оценка качества процесса регулирования САР (реферат, курсовая, диплом, контрольная)
Ранее нами была рассмотрена принципиальная сторона процесса автоматического регулирования. Теперь рассмотрим этот процесс с количественной и качественной стороны. Как было указано, устойчивость работы САР является необходимым условием ее работоспособности. При неудачном выборе параметров регулятора в системе возникают расходящиеся собственные колебания, и система будет неустойчивой. Регулятор будет не успокаивать систему, а раскачивать ее (см. рис. 3.23).
Однако устойчивость не всегда является достаточным условием, которое полностью определяет возможность применения САР. Функционирование САР в условиях автоматизированного производства должно обеспечивать наилучшее приближение кривой процесса регулирования к заданной кривой и обеспечивать требуемые характеристики процесса регулирования, важнейшим из которых является качество регулирования.
Процесс регулирования характеризуется изменением регулируемой величины во времени и обычно представляется в виде графика (рис. 3.8).
Качество процесса регулирования оценивают в установившемся и переходном режимах работы. Качество регулирования САР характеризуется двумя основными показателями — точностью и быстродействием. Точность регулирования оценивается в статическом режиме по величине отклонения регулируемого параметра от заданного значения.
Показатели качества регулирования при переходных процессах оценивают непосредственно по графику переходного процесса (переходной характеристики), возникающего в САР в результате воздействия на нее ступенчатого возмущающего воздействия. Процесс, возникающий в результате такого воздействия, может носить апериодический, или колебательный, характер.
Время регулирования определяют интервалом времени от момента приложения входного воздействия до момента, после которого разность между текущим значением регулируемой величины и его установившимся значением не превышает заданного значения, которое обычно задают на уровне 1—5%.
Кроме этого при колебательном характере переходного процесса определяют относительное перерегулирование, время достижения максимального значения регулируемой величины, число колебаний за время регулирования и период колебаний. Все эти параметры объединяются общим названием «качество переходного процесса».
Аналогичным образом обстоит дело и в следящих системах. Здесь также важна быстрота протекания переходных процессов и малость отклонения выходной (регулируемой) величины у от требуемого закона ее изменения. В частности, при испытаниях следящих систем часто интересуются ее реакцией при включении на входное воздействие х, изменяющееся, но линейному закону (рис. 3.26).
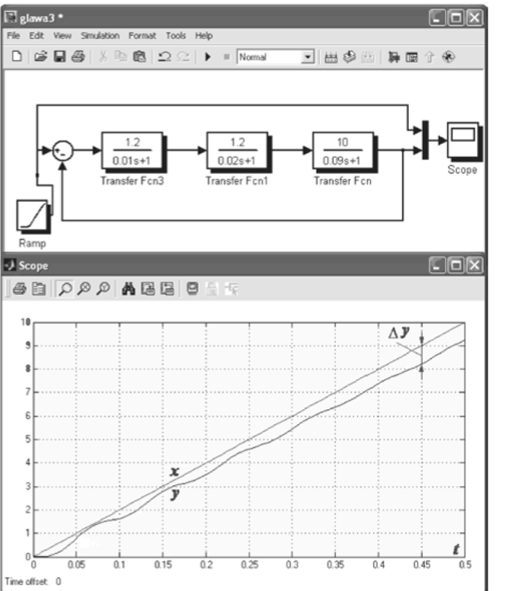
Рис. 3.26. Реакция следящей системы на включение входного воздействия, изменяющегося по линейному закону.
На выходе рассматриваемой на рис. 3.26 системы вследствие ее инерционности сначала процесс идет медленно. Затем скорость изменения выходной величины у будет нарастать, и могут произойти некоторые колебания. Эти колебания вызывают переходную динамическую ошибку. По окончании переходного процесса на выходе так же, как и на входе, устанавливается постоянная скорость изменения сигнала. При этом остается некоторое постоянное отставание выходной величины Ау по сравнению с входной. Эта величина называется установившейся ошибкой в режиме слежения с постоянной скоростью. Величина этой ошибки обычно пропорциональна скорости слежения.
Введение
м специальных корректирующих устройств можно бороться и с этой ошибкой.
Поскольку следящая система призвана возможно точнее воспроизводить любой произвольно задаваемый на входе закон изменения регулируемой величины, то здесь особое значение приобретают частотные характеристики следящей системы, определяющие ее свойства в процессе вынужденных колебаний.
Предыдущий анализ показал, что чем выше коэффициент k, тем меньше статическая ошибка и выше точность регулирования. Однако при этом ухудшаются динамические показатели качества регулирования вплоть до того, что система становится неустойчивой (рис. 3.27).

Рис. 3.27. Переходный процесс в неустойчивой системе при k = 15.
Как было показано в гл. 1, неустойчивую систему можно сделать устойчивой, если кроме обратной связи по отклонению ввести обратную связь по производной отклонения. Такая связь называется корректирующей связью. Она работает на упреждение отклонения и делает систему менее инерционной. В схеме на рис. 3.28 введена обратная связь как последовательное включение идеального дифференцирующего звена и инерционного звена.
Устойчивой систему может сделать и введение рассмотренного выше стабилизирующего звена (рис. 3.29).
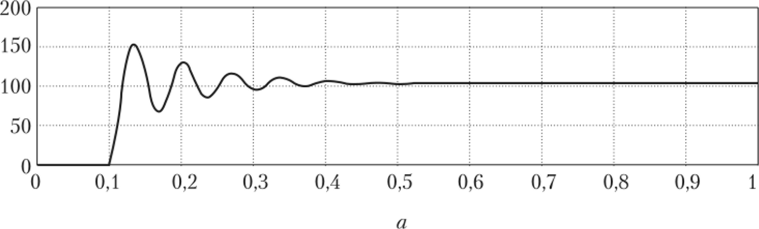
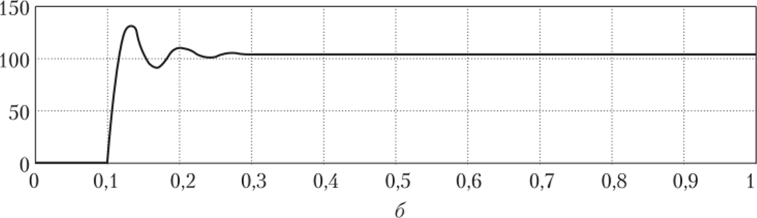
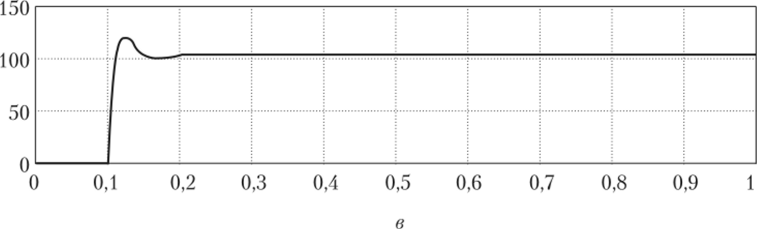
В качестве иллюстрации к сказанному о качестве переходного процесса на рис. 3.30 приведены кривые переходных процессов при воздействии на регулятор ступенчатого сигнала в схеме, представленной на рис. 3.28, при различных коэффициентах связи по производной в блоке Transfer Fcn3: а — k = 5; б — k = 10; в — k = 20.
Как следует из рис. 3.30, при увеличении коэффициента усиления производной показатели качества переходного процесса улучшаются.
Таким образом, роль динамических расчетов и динамических экспериментов при разработке САР и определении ее оптимальных параметров чрезвычайно велика, и неоценимую помощь при этом оказывает математическое моделирование в современных интегрированных пакетах.
Замечание 3.3.
Сокращение времени переходного процесса для улучшения качества регулирования не всегда может быть осуществимо на практике. Например, при регулировании температуры в печи с металлом скорость нарастания температуры в печи определяется мощностью нагревательного устройства, которая имеет определенный предел. Следовательно, максимальная скорость нагрева печи с металлом будет ограничена этим пределом.
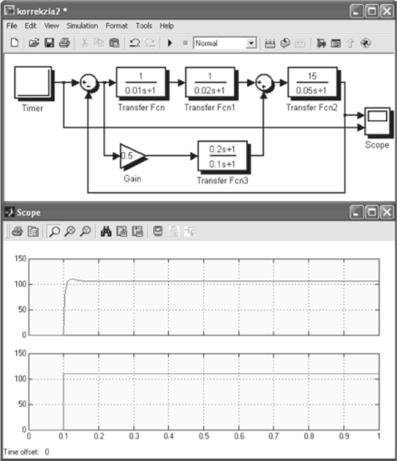
Рис. 3.29.
Введение
стабилизирующего звена в неустойчивую систему
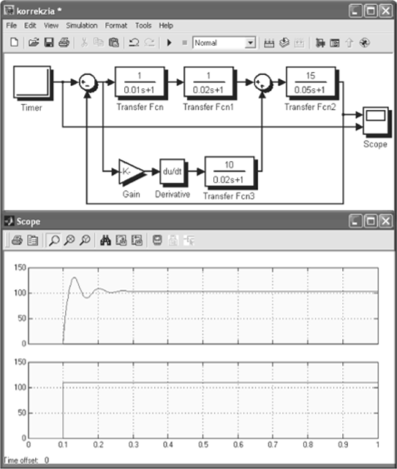
Рис. 3.28. Переходный процесс в неустойчивой САР с тремя апериодическими звеньями (k = 15) после введения корректирующей связи по первой производной.

г.
Рис. 330. Кривые переходных процессов при воздействии на регулятор ступенчатого сигнала в схеме, представленной на рис. 3.28:
а — k = 5; 6 — k = ; в — k = 20; г — входной ступенчатый сигнал.