Человек-оператор в системе управления
Остановимся на операции наблюдения показателей на зрительном индикаторе. Время наблюдения можно выразить соотношением где tj — время, необходимое для оценки показаний приборов; п, — периодичность контроля параметров, т. е. число наблюдений; к — число приборов (в частности стрелок) или других индикаторов; /пв, — время, необходимое для перевода взгляда с одного прибора на другой; /сп — спонтанная… Читать ещё >
Человек-оператор в системе управления (реферат, курсовая, диплом, контрольная)
Человек-оператор как звено системы управления
Сложные системы автоматики представляют собой совокупность технических устройств и людей, занятых эксплуатацией этих устройств. Эту совокупность принято называть системой «человек — машина». Весьма распространенным является случай, когда взаимодействие с машиной осуществляется одним человеком, которого обычно называют оператором (космонавт, пилот, рулевой и т. п.).
Рассмотрим простейшую одноконтурную замкнутую систему управления «человек —машина», изображенную на рис. I5.1, а. Здесь человек-оператор замыкает цепь воздействия в системе управления, являясь звеном этой системы. Процесс управления в этой системе осуществляется как ряд переходов воздействий от одного звена системы к другому (хпх, jc, jc2, jc3, хвых). При этом состояние любого звена влияет на все остальные и, в свою очередь, зависит от них.
В структуру более совершенных систем управления включаются подсистемы автоматического регулирования САР (рис. 15.1, б). Основными функциями оператора становятся контроль за работой САР, предупреждение и профилактика аварий, выявление возникающих неисправностей и т. п. При нормальной работе САР оператор ограничивается наблюдением за состоянием управляемых объектов. Когда же САР не справляется с задачей, оператор вынужден активно вмешиваться в процесс управления.
К современным человекомашинным системам относятся УВМ, которые включаются вместо САР на рис. 15.1, б и осуществляют управление объектом по оптимальной программе, предупреждают аварии, сигнализируют о нарушениях процесса с указанием места их возникновения, освобождая оператора от многих функций. Основной задачей оператора становится контроль за работой УВМ. При выходе УВМ из строя оператор берет на себя и функции управления.
С развитием техники ряд сложных функций, с одной стороны, переходит от человека к машине, что расширяет круг задач, решаемых системами, с другой стороны, с увеличением числа и усложнением машин, включаемых в процесс управления, становится настоятельно необходимым интегрировать их работу. Функции интегрального звена системы управления ложатся на опера;
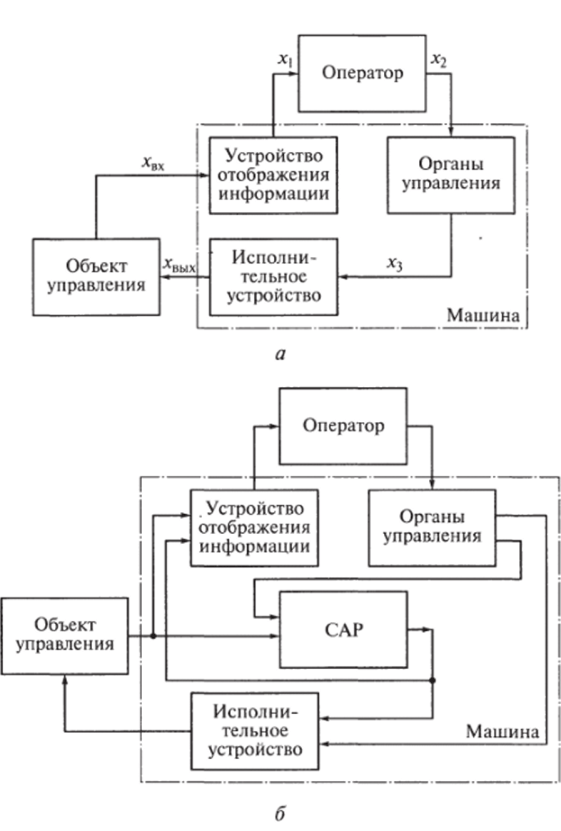
Рис. 15.1. Структуры систем «человек —машина»: а — с человеком-оператором; б — подсистемой автоматического регулирования.
б
тора, а это означает, что относительная роль человека в системах управления возрастает.
Оптимизацией взаимодействия человека-оператора и технических устройств занимается инженерная психология. Эта область знаний получила большое развитие за последние десятилетия, особенно в связи с реализацией программ космических исследований и разработкой военной техники.
Свойства систем управления определяются характеристиками входящих в них звеньев. Из всех характеристик оператора наибольшее влияние на работу систем управления оказывают динамические свойства оператора. Так, в случае одноконтурной системы управления (см. рис. 15.1, а) динамические свойства системы будут определяться временем полного цикла управления (временем прохождения сигнала по контуру «человек —машина»):
где п — общее число машинных звеньев; /, — время задержки сигнала в /'-м машинном звене системы; /оп — время задержки сигнала оператором (от момента поступления сигнала до ответа на него действием).
Величина /оп лежит в пределах 100…500 мс и более и, как правило, существенно превышает суммарное время задержки в машинных звеньях.
В первом приближении время задержки 1оп складывается из так называемого латентного периода реакции /л, т. е. времени от момента появления сигнала до начала ответной реакции (движения) оператора, и времени моторного компонента /м, т. е. длительности ответного движения.
Значение латентного периода неодинаково для сигналов (раздражений), действующих на различные органы чувств (анализаторы) человека, иными словами, для раздражителей различной модальности. Далее приводятся величины средних латентных периодов гл, мс, для различных видов анализаторов (сигнал — раздражитель) и возбуждений средней интенсивности:
Зрительный (свет)…150…220.
Слуховой (звук)…120… 180.
Тактильный (прикосновение)…90…220.
Обонятельный (запах)…ЗЮ…390.
Температурный (тепло и холод)… 280… I 600.
Болевой…130… 890.
Таким образом, запаздывание, вносимое оператором в цепь управления, намного превосходит запаздывание в машинной части (элементах) системы управления (электрических, пневматических и т. п.) и является определяющим для оценки результирующего запаздывания в системе (контуре) управления. Оператору как звену системы управления присуще, прежде всего, «чистое» (латентное) запаздывание.
Звено с постоянным запаздыванием воспроизводит на выходе входную величину как идеальное статическое звено, но выходная величина запаздывает относительно входной на постоянное время т, т. е. 
Передаточная функция подобного звена имеет следующий вид:

Рис. 15.2. Динамические характеристики оператора: а — переходная характеристика; б — ЛФЧХ и ЛАЧХ На рис. 15.2, а показана переходная характеристика звена с постоянным запаздыванием, а на рис. 15.2, б — логарифмические фазочастотная и амплитудно-частотная характеристики.
Латентный период определяется не только характеристиками анализаторов, но и интенсивностью возбуждения (величиной входного сигнала). Чем сильнее раздражитель, т. е. чем больше jcbx, тем меньше длительность латентного периода /л. Таким образом, человек-оператор является нелинейным звеном системы управления. Лишь сверхсильные раздражения вызывают охранное торможение.
С увеличением интенсивности возбуждения возрастают также скорость и ускорение ответного движения, т. е. сокращается время моторного компонента. Зависимость времени реакции человека /р от интенсивности сигнала может быть выражена соотношением.
где а — переменная часть времени реакции; / — интенсивность сигнала-раздражителя; п — величина, зависящая от конкретных характеристик сигналов и условий эксперимента; /min — минимальное время реакции в оптимальных условиях.
В отличие от машинных звеньев, реализующих, как правило, определенный (жесткий) закон преобразования сигналов, оператор способен обучиться разнообразным реакциям на полученные сигналы, в частности реакции статического и астатического звена, корректировать действия по скорости изменения сигнала, дозировать действия пропорционально значениям сигналов или осуществлять некоторые нелинейные преобразования.
Остановимся на операции наблюдения показателей на зрительном индикаторе. Время наблюдения можно выразить соотношением где tj — время, необходимое для оценки показаний приборов; п, — периодичность контроля параметров, т. е. число наблюдений; к — число приборов (в частности стрелок) или других индикаторов; /пв, — время, необходимое для перевода взгляда с одного прибора на другой; /сп — спонтанная (самопроизвольная) отвлекаемость оператора, вызванная не внешними, а внутренними причинами (явлениями).
Дискретность обращения человека-оператора к приборам должна быть согласована с частотой изменения регулируемого параметра. Если оператор обращается к приборам реже необходимого, то имеет место потеря информации, если чаще необходимого, — повышенная утомляемость оператора.
На рис. 15.3 показана связь между изменениями во времени наблюдаемого параметра, т. е. показаний прибора, и периодом дискретности наблюдения /иаб. Поскольку кривая изменения наблюдаемого параметра представляет собой функцию с ограниченным спектром и может быть построена при использовании конечного числа точек (теорема Котельникова), то значение /ма6 будет связано с наибольшей частотой/тях рассматриваемой функции соотношением.

Человек-оператор воспринимает не только значения регулируемого параметрах, но и скорость х, и ускорение х его изменения, поэтому в общем случае формулу (15.1) можно записать в виде.

где к — порядок высшей производной.
Таким образом, наблюдение не только амплитудного параметра х, но и первой производной позволяет увеличить период дискретности измерений (наблюдений) в два раза.
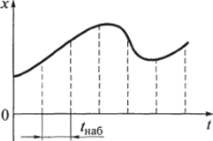
Следовательно, применение приборов непрерывной информации (например, стрелочных) позволяет использовать большее /наб, чем у индикатора дискретного типа, например счетчиков. Индикаторы типа счетчиков обеспечивают большую точность съема неизменяемых параметров, но уступают стрелочным по Рис. 15.3. К оценке дискретпериоду дискретности наблюдения изного наблюдения меняющихся параметров.