Эйлеровы углы.
Механика сплошной среды: теория напряжений и основные модели
Полученное новое положение координатной системы является промежуточным и служит для определения второго поворота. Этот поворот осуществляется относительно промежуточной оси Ох (линии узлов) на угол в, называемый углом нутации. Матрица преобразования координат для этого вращения имеет вид. Эти условия легко устанавливаются. Первые три представляют собой условия равенства единице длины направляющих… Читать ещё >
Эйлеровы углы. Механика сплошной среды: теория напряжений и основные модели (реферат, курсовая, диплом, контрольная)
Практически новые СК получают, осуществляя некоторую последовательность поворотов и производя смещение повернутой системы координат. Положительному направлению поворота в правой СК отвечает такой поворот, который воспринимается наблюдателем, смотрящим с положительного направления оси, вокруг которой осуществляется поворот, как поворот против часовой стрелки.
Если начала координатных систем совмещены, то переход в новое положение можно осуществить с помощью трех поворотов, проводимых в определенной последовательности относительно некоторых вспомогательных осей. Углы этих поворотов называются эйлеровыми.
Строить эйлеровы углы можно различными способами. Существуют свои традиции их построения в аэродинамике самолета (самолетные оси), в теории корабля (корабельные оси) и т. д. Мы здесь рассмотрим вариант, традиционный для задач механики.
Рассмотрим, как происходит переход от старой координатной системы #1, #2, жз к новой ж'1? х2, (рис. 1.4).
Первый поворот осуществляется вокруг оси Ох на угол в, называемый углом прецессии. При этом оси Ох2 и Охз занимают новое промежуточное положение Ох2 и Ох3. Переход в эту новую промежуточную систему может быть легко построен с помощью матрицы направляющих косинусов, в которой столбцами будут проскции на новые координатные оси ортов старой координатной системы:

Линия, определяемая координатной осью Ох, называется линией узлов.
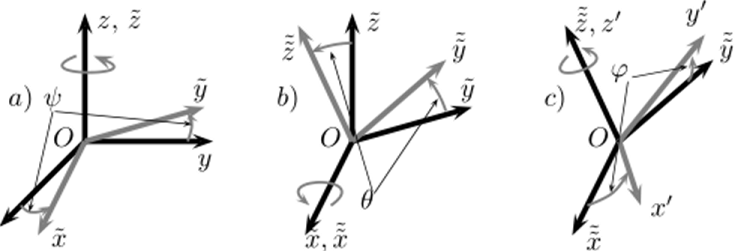
Рис. 1.4. Переход к новой системе координат с помощью углов Эйлера.
Полученное новое положение координатной системы является промежуточным и служит для определения второго поворота. Этот поворот осуществляется относительно промежуточной оси Ох (линии узлов) на угол в, называемый углом нутации. Матрица преобразования координат для этого вращения имеет вид

Положение, которое занимает ось Охз, является окончательным и соответствует положению оси Ох3 в повой системе координат.
Третий поворот вокруг оси Ох3 называется собственно вращением[1] и определяет окончательное положение координатных осей.
Матрица этого преобразования координат имеет вид.

Теперь, если нам необходимо представить некоторый вектор х в новой координатной системе, то мы вначале представим его с помощью преобразования (1.6) в первой промежуточной системе х = = УфХ, затем полученное представление переведем во вторую промежуточную систему с помощью преобразования (1.7) х = Wqx, а после этого совершим окончательное преобразование координат (1.8) ж' = WQ~x.
Объединяя промежуточные преобразования, получим представление вектора в новой СК, определенное тремя последовательными поворотами: х' = Уф (?$(?фХ)). Следует обратить внимание на последовательность расположения матриц, составляющих произведение. Именно такой порядок обеспечивает последовательное преобразование вектора через последовательность промежуточных координатных систем.
Используя свойство ассоциативности операции умножения матриц, расставим скобки так, чтобы определить матрицу общего преобразования координат W = WyWeWq. Это позволяет найти проекции вектора в новой СК х' = Wx, где матрица преобразования легко вычисляется с помощью операций матричного умножения. Вводя для сокращения обозначения co.
sirup = S# и т. д., запишем эту матрицу:

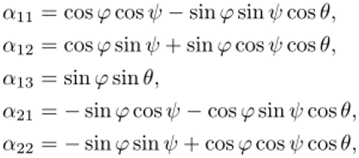
Направляющие косинусы преобразования координат, выраженные через эйлеровы углы, имеют вид.
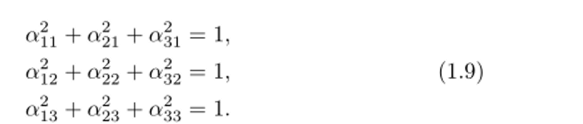
Таким образом, три угла Эйлера определяют все девять компонентов матрицы преобразования координат. Это означает, что ее элементы не являются независимыми и на них должны быть наложены шесть дополнительных условий.
Эти условия легко устанавливаются. Первые три представляют собой условия равенства единице длины направляющих векторов. Если мы запишем их в виде njщ = 1, njrtj = 1, п[. n* = 1, то это приведет к следующим условиям, налагаемым на компоненты матрицы преобразования координат:
Три других соотношения представляют условия ортогональности ортов старой системы координат, записанные через их проекции в новой: nfrij = 0, njn* = 0 и ri[nt = (). Расписанные через направляющие косинусы, эти соотношения примут вид.


- [1] Такое наименование связано с тем, что изначально эйлеровы углы были введены при решении задачи о движении твердого тела, закрепленного в точке. В этом случае старая СК отвечала некоторому начальному положению тела, ановая определяла его текущее положение и была как бы «вморожена» в тело.