Схематизация формы элементов конструкций
На отсчетной поверхности при необходимости вводится местная правосторонняя локальная система координат — хуг. Для обозначения локальных осей используются строчные буквы. Ось х направляется по оси бруса, а оси у и z принадлежат отсчетной поверхности. Начало локальной системы координат (точка Ot) располагается, как правило, в центре тяжести сечения. При необходимости переход от локальной системы… Читать ещё >
Схематизация формы элементов конструкций (реферат, курсовая, диплом, контрольная)
Все тела в нашем мире являются трехмерными. Ввиду отсутствия какого-либо преимущественного направления в теле функции, описывающие его деформирование, будут зависеть от трех независимых аргументов х, у, z, т. е. математическое описание сводится к рассмотрению трехмерной задачи.
Используя дополнительные гипотезы геометрического характера, трехмерную задачу удается свести к двумерной или одномерной задаче. Схематизация формы реального объекта имеет целью привести в соответствие оригиналу одну из типовых геометрических моделей. К числу основных геометрических типов элементов, на которые в расчетной схеме подразделяется целая конструкция, относятся стержень, или брус, оболочка, пластина и трехмерное тело (рис. 1.3).
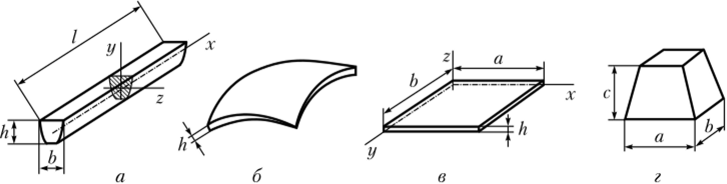
Рис. 13. Схематизация формы элемента конструкции:
а — стержень; б — оболочка; в — пластина; г — трехмерное тело.
Стержнем, или брусом, называется тело, один из размеров которого (длина) много больше двух других размеров (рис. 1.3, а). В случае когда один из размеров тела (толщина) много меньше двух остальных размеров, используется расчетная модель оболочки (рис. 1.3, б). Поверхность, равноудаленная от внешней и внутренней поверхностей оболочки, называется срединной поверхностью. Частным случаем оболочки является пластина (рис. 1.3, в), для которой срединная поверхность является плоскостью.
С введением в практику инженерных расчетов метода конечных элементов оказалось принципиально возможным рассчитывать стержневые и оболочечные конструкции, используя расчетную схему трехмерного тела (рис. 1.3, г). Однако это приводит к значительному увеличению размерности задачи. С этих позиций расчетные схемы стержня и оболочки не утратили своей актуальности.
В случае расчетной модели стержня или бруса (рис. 1.4, а) трехмерная задача с помощью дополнительных гипотез может быть сведена к одномерной задаче. Рассмотрим расчетную схему стержня подробнее.
Стержень можно построить, перемещая плоскую фигуру вдоль в общем случае кривой линии (002), которую назовем осью стержня. При движении плоскость фигуры остается перпендикулярной к оси бруса (см. рис. 1.4, а).
Плоская фигура, которая получается при пересечении оси с перпендикулярной ей плоскостью, называется поперечным сечением стержня, например фигура ЛBCDV
В настоящее время объективно сложилось положение, при котором, следуя традициям или иным соображениям, различным образом рассматриваются вопросы выбора системы координат, а затем формулируются соответ;
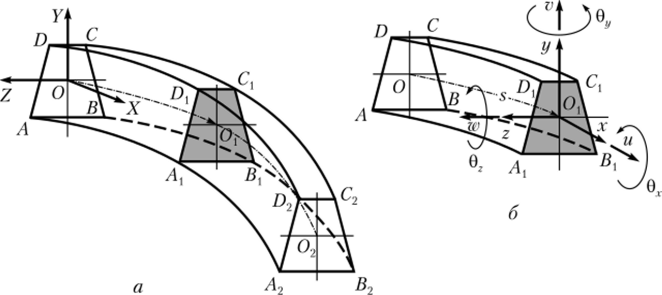
Рис. 1.4. Расчетная схема стержня и системы координат, используемые при изложении курса.
ствующие правила знаков. Отсутствие необходимого единообразия доставляет определенное неудобство как обучающимся, так и преподавателям. По этой причине в учебнике строго используются формулировки и системы координат, знакомые студентам, изучавшим курс теоретической механики. Такой подход согласуется с описаниями, используемыми при дальнейшем изучении дисциплин прочностного цикла (теория упругости, строительная механика и т. д.), а также современных численных методов, таких как метод конечных элементов. Авторы сочли возможным отойти от некоторых сложившихся традиций при обозначениях (например, в качестве осевой координаты бруса используется координата х, а не г). Переформулированы отдельные частные правила определения знаков внутренних силовых факторов.
Геометрия конструкции в целом задается в правосторонней декартовой системе координат XYZ с началом в точке О, называемой глобальной системой координат, или системой координат чертежа. Для обозначения осей используются заглавные буквы (см. рис. 1.4, а).
При анализе напряженно-деформированного состояния элемента конструкции используется понятие сечение. Так, при анализе по расчетной схеме бруса под сечением понимается операция разделения бруса на две части плоскостью, нормальной к оси бруса. Положение сечения определяется продольной координатой 5, отсчитываемой от точки О вдоль в общем случае криволинейной оси бруса (рис. 1.4, б). Начало координаты 5 = 0 задается субъективно (г.е. оно может быть на левом конце, в середине бруса и т. д.). Для прямолинейного бруса в качестве продольной координаты используют координату ху отсчитываемую вдоль недеформированной оси, совпадающей с осью бруса.
При рассечении бруса образуются две поверхности раздела, или два берега. Из двух образовавшихся при разделении поверхностей в качестве отсчетной рассматривается поверхность (см. рис. 1.4, б), внешняя нормаль к которой совпадает с положительным направлением дуговой координаты s.
На отсчетной поверхности при необходимости вводится местная правосторонняя локальная система координат — хуг. Для обозначения локальных осей используются строчные буквы. Ось х направляется по оси бруса, а оси у и z принадлежат отсчетной поверхности. Начало локальной системы координат (точка Ot) располагается, как правило, в центре тяжести сечения. При необходимости переход от локальной системы к глобальной системе координат осуществляется с помощью формул перехода.
Для обозначения перемещений вдоль осей координат используются символы — и, vy w. Положительными считаются перемещения, совпадающие с положительным направлением осей координат.
Аналогичное правило, принятое для правосторонней системы координат, используется для углов поворота. Положительным углом поворота вокруг оси х считается поворот 0Х от оси у к оси г. Если наблюдатель смотрит со стороны оси Ху то он видит вращение против часовой стрелки. Для остальных углов поворота правило формируется путем циклической перестановке индексов Ху у у 2, т. е. положительный поворот 0/у вокруг оси у совершается от оси 2 к Ху а положительный поворот 02 вокруг оси z — от х к у.