Переходные процессы в асинхронных машинах
Если питание прерывается на несколько секунд, большинство асинхронных двигателей успевает остановиться. При восстановлении напряжения начнется самозапуск асинхронных двигателей. Процесс этот является трудным и для двигателей, и для сети, так как требуются большая реактивная мощность для создания полей в двигателях и активная мощность для запуска двигателей. При этом часть двигателей может… Читать ещё >
Переходные процессы в асинхронных машинах (реферат, курсовая, диплом, контрольная)
Переходные процессы имеют место при изменении нагрузки на валу, напряжения, частоты сети, направления вращения при включении и отключении машины от сети, при изменении параметров асинхронной машины. Переходные процессы описываются дифференциальными уравнениями асинхронной машины (3.3) и (3.4) или их видоизменениями. Установившиеся процессы являются частным случаем переходных процессов. Во многих устройствах асинхронные машины непрерывно работают в переходных режимах, и умение проектировать их с учетом переходных процессов определяет их массу и другие технико-экономические показатели. К таким устройствам относятся приводы с ударной нагрузкой (дробилки, электрохолодильники и т. п.), крановые приводы и т. д.
Наиболее важными переходными процессами являются процессы пуска в ход, торможения, реверса, повторного включения и изменения нагрузки на валу. Чтобы исследовать эти процессы, необходимо на ЭВМ решить уравнения (3.3) и (3.4) при тех или иных значениях параметров питающего напряжения и частоты [7].
На рис. 3.61 и 3.62 приведены осциллограммы пуска двигателя 4A100S4y3 (Р2 = 3 кВт, пс = 1500 об/мин). Осциллограммы получены при моделировании уравнений (3.3), (3.4) на ЭВМ. Как очевидно из рисунков, в начале переходного.
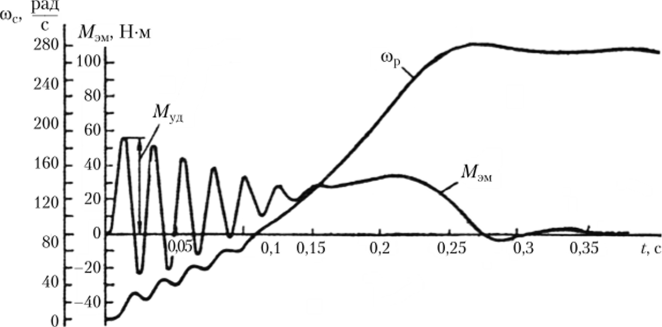
Рис. 3.61. Пуск асинхронного двигателя 4А10 084УЗ при Мс = 0 и синусоидальном напряжении питания.
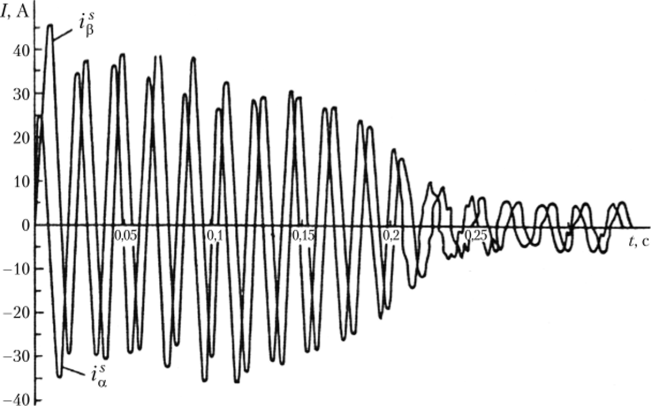
Рис. 3.62. Изменение токов в статоре при пуске.
процесса броски токов максимальны. В первый полупериод наступает максимальный бросок моментов — так называемый ударный момент Муд. На колебания токов и момента отвечает и частота вращения ротора. В конце переходного процесса колебания токов и момента затухают, а частота ротора и электромагнитный момент плавно достигают установившихся значений.
Переходные процессы во вращающихся электрических машинах определяются электромагнитными процессами, связанными с созданием полей в машине, и механическими процессами, обусловленными изменением частоты вращения ротора. Длительность электромагнитных процессов определяется электромагнитной постоянной времени Тям. Электромеханические процессы определяются в основном моментом инерции ротора и характеризуются электромеханической постоянной времени Гм.
Переходные процессы в асинхронном двигателе можно разделить на три стадии.
В первой, начальной стадии, продолжающейся несколько периодов, в пределах Гм из сети забирается в основном активная мощность, которая идет на создание магнитного поля машины и разгон ротора — запасание кинетической энергии во вращающихся частях и совершение механической работы. Эта стадия характеризуется большими пиками токов и момента и значительными ускорениями ротора (см. рис. 3.61 и 3.62).
Во второй стадии, когда процессы, определяемые Тш, установились, а разбег ротора еще продолжается, энергия, потребляемая из сети, расходуется на увеличение кинетической энергии и совершение механической работы. В этой стадии машина обменивается мощностью с сетью и соотношение между активной и реактивной мощностями все более стабилизируется, подходя к значениям установившегося режима. Амплитуды токов и момента затухают.
В конечной, третьей стадии переходного процесса, когда ротор достигает установившейся частоты вращения, броски токов и моментов уменьшаются и машина входит в установившийся режим.
В асинхронных машинах традиционной конструкции Т.ш на порядок меньше Тм и в первом приближении можно рассматривать переходные процессы без учета электромагнитных процессов.
На характер протекания переходных процессов при пуске основное влияние оказывают момент инерции и активное сопротивление обмотки ротора. Двигатели небольшой мощности с малым моментом инерции разгоняются до установившейся скорости за несколько периодов, но ротор может выйти за синхронную частоту вращения и после качания у синхронной скорости перейти в установившийся режим. Двигатели большой мощности разгоняются медленно, и ротор подходит к установившейся частоте вращения без перерегулирования.
Как показывают исследования, процессы при пуске определяются начальными значениями параметров при 5=1.
Характер нелинейного изменения параметров в процессе разгона имеет второстепенное значение.
Из-за насыщения индуктивные параметры отличаются от их значений при установившихся режимах. Индуктивности и взаимные индуктивности при пуске на 30—40% меньше их установившихся значений. Параметры машины в начальный момент времени переходного процесса называются переходными параметрами. Определить переходные параметры асинхронных машин можно с помощью ЭВМ, если известны результаты переходного процесса при пуске. Расчетные методики для определения переходных параметров асинхронных машин разработаны еще недостаточно, так как переходными процессами в асинхронных машинах глубоко начали заниматься с появлением ЭВМ.
При пуске асинхронных двигателей для увеличения пускового момента необходимо увеличивать г2, а при номинальном режиме для увеличения КПД и cos ф надо г'> иметь меньше, чтобы sH0M было равно 1—4%.
Для тяжелых условий пуска в приводах от нескольких киловатт до сотен киловатт применяются двигатели с фазным ротором. В этих двигателях фазная обмотка выводится на кольца, к которым при пуске подключается резистор. По мере разгона двигателя сопротивление резистора постепенно уменьшается, а затем резистор выводится и кольца закорач и ваются.
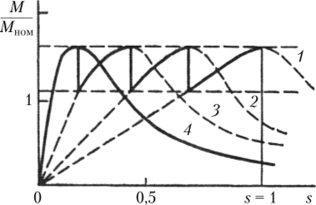
Рис. 3.63. Пуск в ход двигателя с фазным ротором Пусковые резисторы выполняют проволочными, литыми чугунными и жидкостными. Резисторы помещают в бак с трансформаторным маслом и рассчитывают на кратковременный режим работы. Жидкостный резистор представляет собой сосуд с электролитом, в который опущены электроды. При изменении глубины погружения электродов изменяется сопротивление резистора.
На рис. 3.63 показан процесс пуска двигателя с фазным ротором. Двигатель пускается с полностью введенным резистором и работает на механической характеристике 1. При этом Мп ~ Мтах.
После того как двигатель подойдет к скольжению.
s ~ 0,5-j-0,6, переключается резистор и закорачивается часть его сопротивления. Двигатель переходит на характеристику 2. Затем при s * 0,3-^0,4 переключается вторая ступень и двигатель начинает работать на характеристике 3. После того как будет закорочена третья ступень при s ~ 0,1-Ю, 2, двигатель переходит па естественную механическую характеристику 4.
После окончания пуска щетки закорачиваются, а пусковой резистор приводится в исходное положение. В некоторых старых конструкциях после закорачивания фазных обмоток щетки поднимались. В современных конструкциях щетки скользят по кольцам во всех режимах работы. Это приводит к увеличению механических потерь, но повышает надежность двигателя за счет упрощения щеточного аппарата.
Двигатели с фазным ротором дороже двигателей с короткозамкнутой обмоткой и требуют дополнительной пускорегулирующей аппаратуры. В серии 4А двигатели с фазным ротором выполняются на мощности от 5,5 до 400 кВт и частоты вращения от 500 до 1500 об/мин. В двигателях с высотой оси вращения 160—200 мм применена всыпная обмотка, а в двигателях с высотой оси вращения 225—355 мм — стержневая из медной проволоки прямоугольного сечения.
Электротехническая промышленность для тяжелых условий пуска изготовляет двигатели с короткозамкнутым ротором — это двигатели с двойной беличьей клеткой и двигатели с глубоким пазом специального профиля (см. параграф 3.13). В этих двигателях из-за вытеснения тока ток в стержнях обмотки ротора проходит при пуске по части обмотки, расположенной ближе к зазору, а при номинальном режиме распределяется равномерно по всему сечению обмотки.
В двигателях с двойной беличьей клеткой пусковая клетка, находящаяся ближе к зазору, выполняется меньшего сечения, чем рабочая (см. рис. 3.50). Иногда пусковую клетку выполняют из латуни или бронзы, а рабочую — из меди. Механическая характеристика двигателя с двойной беличьей клеткой показана па рис. 3.59.
Рассчитывая асинхронный двигатель, необходимо стремиться к увеличению пускового момента, оставляя кратность пускового тока не более kj = 5+7. Увеличение токов в переходных режимах приводит к увеличению ударных моментов, а также к увеличению падения напряжения в се;
ти, что неблагоприятно сказывается на пусковых характеристиках, так как момент пропорционален квадрату напряжения.
Асинхронные двигатели с короткозамкнутым ротором пускают обычно прямым включением на номинальное напряжение. Процесс пуска определяется механическими характеристиками двигателя и нагрузки (см. рис. 3.53). Чтобы двигатель мог разгоняться до номинальной частоты вращения, необходимо, чтобы Мп был больше Мс при s = 1 и механические характеристики двигателя и нагрузки пересекались в одной точке вблизи sH0M. Если из-за провалов в кривой M=f (s) она может пересекаться с кривой Мс =/(s) вблизи скольжений s = 1, то двигатель «застрянет» в этой точке и из-за больших потерь в роторе не сможет длительно работать в таком режиме. В этом случае необходимо выбрать двигатель большей мощности.
Уравнение движения ротора двигателя.

Процесс разгона двигателя продолжается до тех пор, пока электромагнитный момент и момент сопротивления не окажутся равными по модулю. Для определения времени пуска в первом приближении можно проинтегрировать уравнение движения (3.114):

Для более точного определения tn необходимо решить на ЭВМ уравнения напряжения и движения (3.3) и (3.4). При этом tn определяется с учетом электромагнитных переходных процессов. При определении tn из уравнения (3.115) переходные процессы в обмотках двигателя нс учитываются.
При небольших различиях Мзм и Мс процесс пуска затягивается, что приводит к увеличению потерь в роторе, а это может вызвать недопустимое увеличение температуры обмоток. В некоторых случаях для крупных двигателей ограничивается число включений двигателя в 1 ч.
При пуске крупных асинхронных двигателей для ограничения пусковых токов включается реактор или автотрансформатор. При особо трудных условиях пуска двигателей в несколько десятков тысяч киловатт применяют частотный пуск, когда с помощью преобразователя частоты постепенно повышается частота подводимого к статору напряжения. При частотном пуске одновременно регулируются частота и напряжение, подводимые к двигателю, так,.
U
чтобы выполнялось условие у = const. При таком регулироровапии поток в двигателе остается практически неизменным и броски тока не превышают двух-трехкратных значений по сравнению с номинальным током. Однако частотный пуск имеет ограниченные применения из-за больших габаритов и стоимости преобразователей, рассчитываемых на полную мощность двигателя, а работающих только при пуске.
Реакторный пуск осуществляется по схеме рис. 3.64, а. Пусковые реакторы имеют ферромагнитный магнитопровод. Их рассчитывают на кратковременный режим работы. Для двигателей большой мощности применяются бетонные реакторы.
Пусковой ток при включенном реакторе (выключатель Q2 разомкнут).

где (7Н0М — номинальное напряжение двигателя; хр — индуктивное сопротивление реактора (активным сопротивлением реактора пренебрегаем). За счет jrp пусковой ток уменьшается до трех-четырехкратного значения.
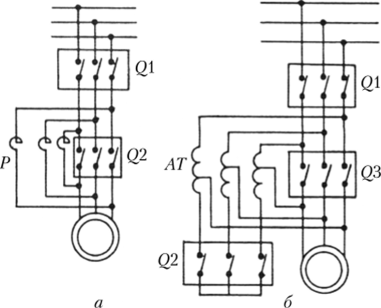
Рис. 3.64. Схемы пуска асинхронных двигателей большой мощности.
Процесс пуска при включении реактора осуществляется следующим образом. При разомкнутом выключателе Q2 двигатель выключателем Q1 подключается к сети. После достижения ротором номинальной частоты вращения выключателем (У2 закорачивается реактор.
При автотрансформаторном пуске (рис. 3.64, б) сначала включаются выключатели Q1 и Q2 и на двигатель через автотрансформатор подается пониженное напряжение. После отключения Q2 автотрансформатор некоторое время работает как реактор, а по достижении двигателем номинальной частоты вращения включается выключатель Q3 и двигатель подключается к сети.
Переключением обмоток статора в конце пуска со звезды на треугольник также можно обеспечить снижение пусковых токов. При таком пуске линейные токи снижаются в 3 раза, а напряжения — в V3 раз. Недостатком этого способа пуска является размыкание цепи двигателя, что приводит к перенапряжениям. Данный способ пуска в настоящее время почти не применяется.
Для пуска в ход асинхронных двигателей большой мощности иногда применяется пуск с помощью разгонного двигателя, который жестко соединен с валом основного двигателя. Если основной двигатель тихоходный, то разгонный двигатель выбирается па частототу вращения на ступень большую. При подходе к синхронной частоте вращения основного двигателя разгонный двигатель отключается, а основной двигатель подключается к сети. Недостаток этого способа — наличие разгонного двигателя, используемого только при пуске.
Одним из тяжелых переходных режимов является режим реверса, когда при переключении порядка следования фаз на выводах машины происходит изменение направления вращения ротора. При реверсе двигатель сначала отключается от сети, а затем включается на напряжение обратной последовательности. Переходный процесс определяется временем коммутации и в сильной степени — скоростью затухания магнитного поля в воздушном зазоре. Чем меньше время коммутации, тем больше ударные токи и моменты, тем тяжелее протекают переходные процессы.
При повторном включении асинхронного двигателя в сеть при наличии еще незатухшего поля в зазоре также наблюдаются большие ударные токи и моменты. Процесс повторного включения имеет место при кратковременных перерывах питания, а также в тяговых асинхронных двигателях при нарушении скользящего контакта в сети.
Если питание прерывается на несколько секунд, большинство асинхронных двигателей успевает остановиться. При восстановлении напряжения начнется самозапуск асинхронных двигателей. Процесс этот является трудным и для двигателей, и для сети, так как требуются большая реактивная мощность для создания полей в двигателях и активная мощность для запуска двигателей. При этом часть двигателей может не запуститься, а часть из-за затяжного пуска может перегреться. При длительном перерыве питания (в несколько секунд или минут) необходимо двигатели отключать от сети и только ответственные электроприводы оставлять подключенными к сети.
Процессы при реверсе и повторном включении сложнее процессов пуска. Оптимальные параметры при пуске, реверсе и других динамических режимах отличаются друг от друга.
Все параметры в переходных процессах определяются путем решения системы уравнений электромеханического преобразования энергии. Уменьшение или увеличение только одного из параметров не может привести к оптимальным результатам. Существуют оптимальные соотношения между параметрами машины, когда интересующие исследователя показатели имеют экстремумы.
Процессы преобразования энергии в переходных режимах значительно сложнее процессов в установившихся режимах, поэтому сложившиеся представления об энергетических показателях установившихся режимов не могут быть перенесены на переходные процессы. Здесь имеет смысл говорить о средних за время переходного процесса энергетических показателях. Понятия об активной, реактивной и полной мощностях теряют смысл, если рассматривать их мгновенные значения. Представляется целесообразным рассматривать реактивную мощность как мощность, идущую на создание магнитных нолей в машине. При этом реактивная мощность преобразуется в активную, и наоборот. Весь сложный процесс преобразования энергии в машине описывается уравнениями электромеханического преобразования энергии со всей точностью и многообразием, которые выбрал исследователь.
В первый момент подключения двигателя к сети мощность из сети только забирается, а затем начинается обмен мощностями между машиной и сетью; при отключении машины от сети реактивная мощность, запасенная в магнитных полях, преобразуется в тепло. Особенно сложные процессы в динамике имеют место в несимметричных электрических машинах с учетом нелинейных коэффициентов и при несинусоидальном несимметричном напряжении питания.
Возможности вычислительной техники в настоящее время позволяют решить практически все встречающиеся в практике задачи, связанные с исследованием переходных процессов асинхронных машин. Подробно эти процессы изучаются в спецкурсе |7|.