Расчет элементов прибора
Преобразователь соленоидного типа. ДСИП состоит из двух идентичных катушек и сердечника (рис. 114.14), перемещение которого вызывает изменение полных электрических сопротивлений катушек, причем сопротивление одной из них увеличивается, а другой — уменьшается (см. рис. П4.9, в). Расстояние между торцами катушек влияет на чувствительность преобразователя и подбирается (наряду с другими параметрами… Читать ещё >
Расчет элементов прибора (реферат, курсовая, диплом, контрольная)
Расчету подлежат следующие элементы прибора: предварительный преобразователь, индуктивный преобразователь, схема включения и корректирующее звено. Остальные элементы прибора рассматриваются как «покупные» изделия, которые при необходимости нуждаются в коррекции своих характеристик.
Расчеты выполняются на ПЭВМ с использованием компьютерных технологий и программ, которые выбираются самостоятельно. Рекомендуется выполнять расчеты с применением программы Mathcad. Распечатки файлов размещаются в приложении, а расчетные схемы, алгоритмы и результаты расчетов — в пояснительной записке.
Расчет предварительного преобразователя. Схема, конструкция и параметры предварительного преобразователя (ПП) выбираются и рассчитываются так, чтобы получить желаемое перемещение якоря ДИП д'в, соответствующее максимальному значению измеряемой величины (давления, ускорения, силы, перемещения) хт. Для индуктивных преобразователей разного типа его выбирают из диапазонов: ДЗИП 0,01 <�х0 <0,5 мм, ДПИП 0,05 < хв < 2,5 мм, ДСИП 0,5 < хв < 50 мм с учетом допустимых габаритов предварительного преобразователя и возможности его изготовления. Соответствующее желаемое значение коэффициента передачи предварительного преобразователя, зависящее от параметров его схемы и конструкции, равно.

Например, если объектом проектирования является индуктивный манометр с диапазоном измерений 0 < Р <�Ри = 200 кПа и дифференциальным индуктивным преобразователем с переменной величиной воздушного зазора (ДЗИП), то расчет ПП (мембраны, мембранного блока, трубки Бурдона, сильфона и пр.) выполняется так, чтобы его статическая характеристика была линейной и не нарушалось условие 0,01<&п^} <0,5 мм, где Рн = 200 000 Па.
Если статическая характеристика предварительного преобразователя (П4.1) нелинейная, то она может повлиять на нелинейность общей статической характеристики прибора. Поэтому при расчете предварительного преобразователя (например, мембраны) следует учитывать условия, обеспечивающие выполнение равенства (П4.1). Если выполнение этого равенства невозможно, то при расчете статической характеристики прибора нужно учитывать фактическую характеристику предварительного преобразователя.
Расчет индуктивного преобразователя. На рис. 114.12—П4.14 показаны расчетные схемы рассматриваемых индуктивных преобразователей: с переменной величиной воздушного зазора (ЗИП) — рис. П4.12, с переменной площадью воздушного зазора (ПИП) — рис. П4.13 и соленоидного типа (СИП) — рис. П4.14. Дифференциальные преобразователи состоят из двух таких преобразователей (см. рис. Г14.3).
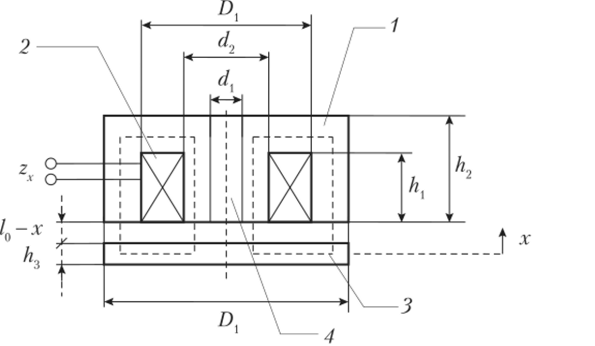
Рис. 114.12.
Поясним подробнее состав расчетных схем преобразователей. Преобразователь с переменным воздушным зазором. ЗИП (рис. 114.12) состоит из Ш-образного цилиндрического сердечника 1 с катушкой 2
и подвижного якоря (диска) 3, перемещение которого вызывает изменение электрического сопротивления катушки zx. Связь якоря с объектом контроля осуществляется через технологическое отверстие 4. Во множество геометрических параметров магнитопровода {Гм}, подлежащих расчету, включены восемь величин: диаметр технологического отверстия d{, внутренний диаметр катушки; внешний диаметр сердечника (и якоря); наружный диаметр катушки D2; высота катушки; высота сердечника; толщина якоря; начальный воздушный зазор.
Преобразователь с переменной площадью воздушного зазора. ПИП (рис. П4.13) состоит из цилиндрического сердечника 1 с катушкой 2, закрытых полюсом (ферритовой шайбой) 3, и подвижного якоря в виде ферромагнитной трубки 4, перемещение которой приводит к изменению площади воздушного зазора 5 между боковой поверхностью отверстия в полюсе и трубкой 4, по которым распространяется магнитный поток (показан пунктиром).
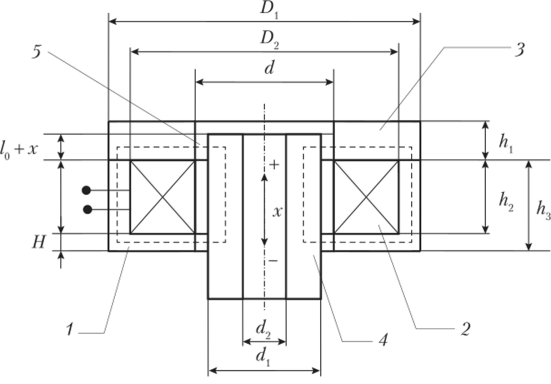
Рис. П4.13
В результате изменяются индуктивность катушки и ее полное электрическое сопротивление. Во множество геометрических параметров магнитопровода, подлежащих расчету, включены восемь величин: наружный диаметр сердечника; внутренний диаметр сердечника; наружный диаметр якоря; внутренний диаметр якоря; толщина полюса 3 длина катушки 2; высота сердечника 1', начальное смещение якоря 4 относительно основания полюса 3.
Преобразователь соленоидного типа. ДСИП состоит из двух идентичных катушек и сердечника (рис. 114.14), перемещение которого вызывает изменение полных электрических сопротивлений катушек, причем сопротивление одной из них увеличивается, а другой — уменьшается (см. рис. П4.9, в). Расстояние между торцами катушек влияет на чувствительность преобразователя и подбирается (наряду с другими параметрами) так, чтобы обеспечить ее максимальное значение [2].

Рис. 114.14.
Во всех случаях целями расчета преобразователя являются:
- • определение и анализ зависимости сопротивления преобразователя от перемещения якоря (т.е. определение расчетной статической характеристики индуктивного преобразователя (см. табл. II4.1));
- • выбор материала и расчет размеров {Гм} магнитопровода;
- • расчет витковых данных катушки (материала, диаметра, сечения провода и числа витков).
Методики и примеры таких расчетов даны в работе [29].
Целью анализа расчетной статической характеристики преобразователя является получение формул, связывающих чувствительность датчика и погрешность от нелинейности его статической характеристики с физическими параметрами преобразователя. При расчете преобразователя эти параметры варьируются до тех пор, пока не будут получены приемлемые выходные характеристики датчика. При этом в число ограничений вовлекаются условия адекватности математической модели преобразователя и условия физической реализуемости датчика.
Расчет схемы включения. Выбор пассивных сопротивлений плеч моста R и сопротивления нагрузки (входного сопротивления усилителя) RH подчиняют условию R = RH = г0, где z0 — начальное сопротивление катушки, если в приборе используется ПОСМ, или условиям R = z0/2, Ru = 2z0/3, если используется ПРСМ. Если RH «R, то мост работает в режиме холостого хода. В этом случае нужно принять R = z0. Во всех этих случаях чувствительность схемы включения близка к максимальной.
Выбор частоты и амплитуды напряжения питания осуществляется с учетом допустимой плотности тока, протекающего по катушкам преобразователя, и необходимой величины выходного сигнала схемы включения.
Алгоритмы и примеры таких расчетов даны в работе [29].
Расчет корректирующего звена. Корректирующее звено используется для коррекции статических и динамических характеристик прибора. Для реализации этого звена можно использовать операционные усилители [29] или устройство цифровой обработки сигнала (микроконтроллер).
Расчет и анализ погрешностей. При расчете погрешностей измерений кроме нелинейности функции преобразования и инерционности элементов прибора учитываются внешние и внутренние помехи, действующие на прибор, а также отклонения его параметров, вызывающие погрешность коэффициента чувствительности прибора.
Все факторы, вызывающие погрешности звеньев, отражаются на структурной схеме прибора указанием соответствующих аддитивных помех fs и fs, действующих соответственно на входе и выходе каждого (5-го) звена, и относительной погрешности коэффициента чувствительности этого звена hs =Aks/kso. На рис. 114.15, а они показаны только для первого звена ИНДИП — ПП — предварительного преобразователя. После этого, используя рекомендации подпараграфов 9.2.3 и 9.2.4 учебника, можно определить параметры эквивалентной структурной схемы прибора (рис. П4.15, в). К ним относятся эквивалентные аддитивные помехи F и F, действующие на входе и выходе прибора, номинальный коэффициент чувствительности прибора К0 = 1, его относительная погрешность Н = АК/К0 и операторная часть передаточной функции прибора W0(p).
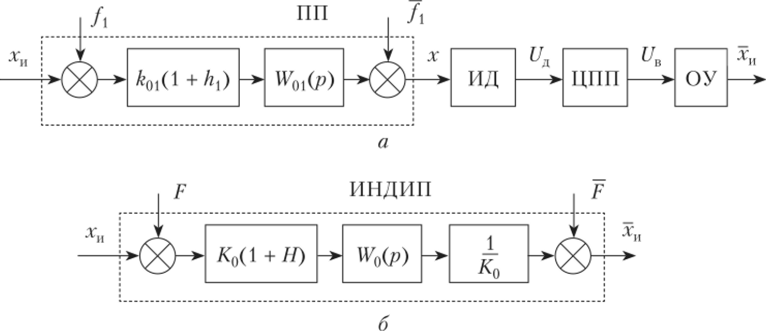
Рис. П4.15
Используя эти данные, можно получить расчетную оценку суммарной абсолютной погрешности измерений.

где хи — показание прибора; хИ — истинное значение измеряемой физической величины. В общем случае оно описывается выражением.

где тх — детерминированная (известная) постоянная величина; mx(t) — де;
о терминированная функция времени; X — центрированная (т.е. имеющая нулевое математическое ожидание) случайная величина с дисперсией Dx
X (t) — центрированная стационарная случайная функция времени с энергетическим спектром Sr(со) (или автокорреляционной функцией Кх.(т)). Параметры модели измерительного сигнала (П4.15) получают на основе априорной информации о поведении объекта измерений. При выполнении курсовой работы их указывают в индивидуальном задании (см. параграф II4.8).
Аналогично описываются эквивалентные аддитивные помехи F и F. Эквивалентность этих помех означает, что их влияние на показание прибора х эквивалентно действию всех внутренних аддитивных помех fs. Относительная погрешность общего коэффициента чувствительности прибора Н = АК/К0 считается случайной величиной.

где тн — систематическая составляющая относительной погрешности ко;
о эффициента чувствительности; Я — центрированная случайная составляющая этой погрешности, имеющая дисперсию DH. Для всех вариантов заданий принимается ти =0, DH = 10_6.
Характеристики модели измеряемой физической величины (114.15) тх, mx(t), Dx и 5v(w) (или Rx(т)) заданы (см. оборот задания). Все внутренние помехи приводятся к эквивалентной аддитивной помехе F, действующей на входе прибора (т.е. считается, что F = 0). Характеристики этой помехи mFi mF(t), DF и SF(со) (или RF(т)) также заданы.
Как показано в параграфе 9.1, абсолютную погрешность измерений (114.14) можно представить в одной из трех форм:

где Дст — статическая погрешность, не зависящая от времени; Дд(?) — динамическая погрешность; тл — систематическая погрешность; А — центрированная случайная погрешность с дисперсией Яд; Да — аддитивная погрешность, не зависящая от измеряемой величины; Дм — мультипликативная погрешность, пропорциональная измеряемой величине.
В табл. 9.3 даны формулы для расчета всех этих составляющих погрешности. Суммарная погрешность результата измерений вычисляется по формуле.

где у" — погрешность от нелинейности статической характеристики прибора; М = тах{|Мст + Мд(?)|} — максимальная систематическая погрешность, которая складывается из статической и динамической составляющих. Каждая из них, в свою очередь, складывается из соответствующих аддитивной и мультипликативной составляющих, т. е.

Аналогично, D = тах (|Д.т + Д((/)|) — максимальная дисперсия случайной погрешности, где.

Величины тл, тА, тА (t) тА (t) и D,, D,, 1)А (t), DA (t)
ста сти ла Дм tTa стм ла лм вычисляются по формулам табл. 9.3.
Если оценка погрешности у превышает допустимую приведенную погрешность прибора уд, указанную в задании, то нужно определить допустимые собственные (обусловленные величинами у", Н, 1Е0) и вынужденные (обусловленные величинами F, F) погрешности прибора, при которых требование к допустимой погрешности измерений выполняется.