Особенности волнового зацепления
Гибкое колесо ВЗП при его нагружении изменяет свою начальную форму. Это происходит из-за наличия зазоров и упругости элементов, взаимодействующих с гибким колесом. Изменение формы гибкого колеса 1 ограничено с внешней стороны жестким колесом 2, а с внутренней генератором волн h. Гибкое колесо, опирающееся на генератор волн в пределах участков постоянной кривизны 2р (рис. 19.3), стремит… Читать ещё >
Особенности волнового зацепления (реферат, курсовая, диплом, контрольная)
Гибкое колесо ВЗП при его нагружении изменяет свою начальную форму. Это происходит из-за наличия зазоров и упругости элементов, взаимодействующих с гибким колесом. Изменение формы гибкого колеса 1 ограничено с внешней стороны жестким колесом 2, а с внутренней генератором волн h. Гибкое колесо, опирающееся на генератор волн в пределах участков постоянной кривизны 2р (рис. 19.3), стремит;
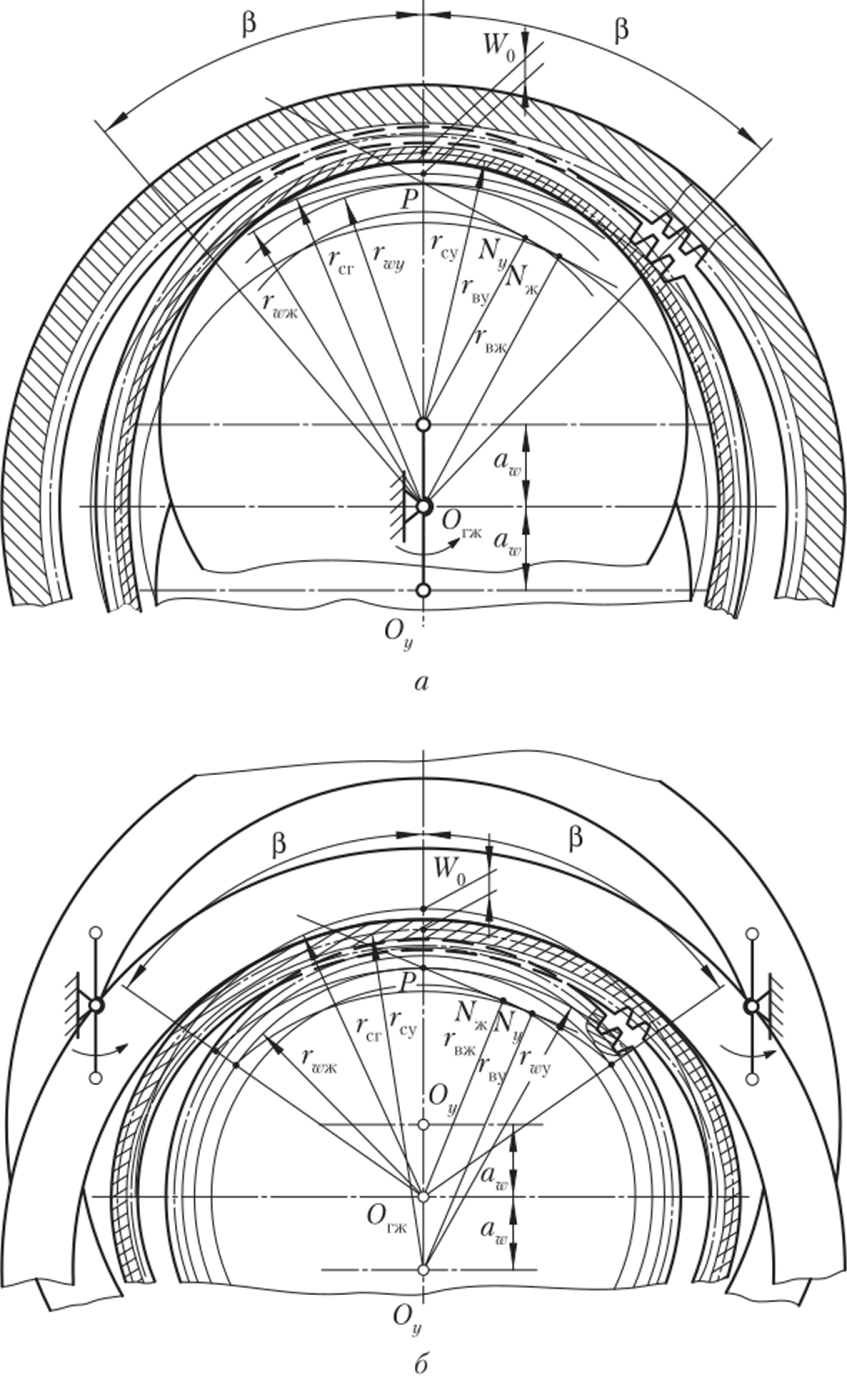
Рис. 193.
ся принять форму жесткого колеса. С увеличением момента, закручивающего гибкое колесо, зоны выбранных зазоров в зацеплении увеличиваются, что приводит к увеличению числа пар зубьев в зацеплении. Благодаря многопарности зацепления (нагрузку могут передавать до 40% всех пар зубьев) нагрузочная способность ВЗП выше, чем планетарной. КПД волновой передачи также выше, потому что в зацеплении зубья почти не перемещаются при прилегании гибкого колеса к жесткому. При стальных гибких колесах в одноступенчатых волновых передачах можно получить передаточное отношение 60—320, а КПД равным 0,85…0,80. Двухступенчатые ВЗП обеспечивают передаточные отношения от 2 • 103 до 104 и более при КПД от 0,7 до 0,1.
Многоиарность и многозонность волнового зацепления приводят к значительному усреднению ошибок изготовления и сборки, в результате чего обеспечивается высокая кинематическая точность ВЗП.
Относительно небольшая величина радиальной деформации гибкого колеса позволяет выполнить его в виде колоколообразной оболочки и изготовить герметичные ВЗП, передающие вращение через герметичную перегородку без подвижных уплотнений.
Наиболее ответственные детали ВЗП — гибкий подшипник и гибкое колесо. Гибкое колесо имеет тонкостенное донышко, допускающее осевые перемещения торца цилиндрической оболочки при ее деформировании с другого края. Длину гибкого колеса выбирают от 0,5б/тдо 1,1 <7г, где dcr — диаметр недеформированной серединной поверхности гибкого колеса. Толщину Л гибкого колеса под зубчатым венцом выбирают примерно равной 0,01 <7 г.