Исследование самоуравновешенности и уравновешивание многоцилиндровых двухблочных двигателей
Плоскость первого кривошипа совмещается с положительным направлением оси координат Y. Радиус-вектор А/^, 4) будет располагаться перпендикулярно плоскости действия сил Qx и Q4. Направление радиус-вектора продольного момента определяется по правилу «бурава»: если под действием пары сил Q «бурав» вворачивается, то радиус-вектор момента направляется в сторону его вворачивания (перпендикулярно… Читать ещё >
Исследование самоуравновешенности и уравновешивание многоцилиндровых двухблочных двигателей (реферат, курсовая, диплом, контрольная)
В соответствии с правилами исследования самоуравновешенности (см. п. 3.2.3), сначала рассматривается одноблочный одновальный двигатель, являющийся составной частью двухблочного двигателя.
Если такой одноблочный двигатель не самоуравновешен по каким-либо из шести признаков, то и соответствующий двухблочный двигатель не будет самоуравновешен по таким же признакам. В этом случае двухблочный двигатель мысленно расчленяется на одинаковые плоские отсеки. После этого рассматриваются свойства отсека по силам инерции того порядка (первого и/или второго), по которым был получен неблагоприятный результат (по силам или продольному моменту) при исследовании самоуравновешенности одноблочного двигателя.
Двигатель с компоновочной схемой 84V90°
Для получения минимальных габаритных размеров 4-тактный 8-цилиндровый автотракторный двигатель должен иметь двухблочное исполнение.
Чтобы обеспечить равенство интервалов между вспышками в цилиндрах этого двигателя, угол между блоками цилиндров у должен отвечать условию у = 720° / = 720° / 8 = 90°.
С точки зрения обеспечения равенства интервалов между вспышками в цилиндрах двигателя КВ может иметь как равномерную продольно-симметричную (см. рис. 3.12), так и равномерную продольно-несимметричную схему расположения кривошипов (см. рис. 3.13).
У одноблочного 4-тактного 4-цилиндрового двигателя с равномерной продольно-симметричной схемой расположения кривошипов КВ результирующая сила инерции второго порядка? РП ф 0. То есть по признаку (5) двигатель с таким КВ не самоуравновешен.
В п. 3.4.4 показано, что в горизонтальной плоскости отдельно взятого отсека 2V900 (по оси координат X) действует неуравновешенная сила инерции второго порядка с амплитудой (ZP,)^ = V2 hnsR (o2 (см. годограф этой силы на рис. 3.17 при у = 90°). Для двигателя 84V900, состоящего из четырех таких отсеков, неуравновешенная сила инерции второго порядка будет иметь амплитуду (Х^ц^та* = 4У2 hns Лео2. Эта сила приложена к средней по длине коренной шейке КВ и раскачивает двигатель в горизонтальной плоскости. Для автомобильного дизельного двигателя с диаметром цилиндра 130 мм и частотой вращения КВ 2100 1/мин значение этой силы превышает 10 кН. Таким образом, применение в двигателе 84V900 коленчатого вала с равномерной продольно-симметричной схемой расположения кривошипов нецелесообразно.
При рассмотрении плоского отсека 2V900 (см. п. 3.5.2) было показано, что силу инерции первого порядка и центробежную силу инерции можно рассматривать совместно, представив их динамически эквивалентную модель радиус-вектором силы Q. Уравновешивание радиус-вектора силы Q в отдельном отсеке осуществляется применением противовесов на щеках КВ.
В двигателе, составленном из отсеков 2V900, уравновешивание радиус-векторов сил Q и возможного продольного момента от этих сил также можно осуществить применением противовесов на щеках КВ независимо от схемы расположения кривошипов и при любом количестве цилиндров в блоке.
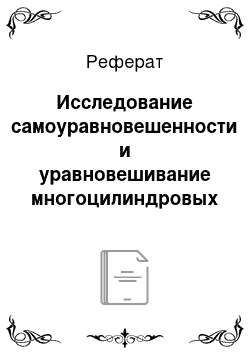
Поэтому для двигателя 84V900 выбор схемы расположения кривошипов КВ необходимо подчинить условию получения наиболее благоприятных результатов по силам и моментам инерции второго порядка, т. е. обеспечения самоуравновешенности по признакам (5) и (6). Для достижения этого условия необходимо, чтобы схема расположения фиктивных радиус-векторов сил инерции второго порядка С" была равномерной и продольносимметричной (рис. 3.23).
Для перехода от схемы расположения фиктивных радиусвекторов С" к искомой схеме расположения кривошипов КВ необходимо «свернуть» схему фиктивных радиус-векторов С, (см. рис. 3.23, а), уменьшив вдвое углы между радиус-векторами. Результатом такого «сворачивания» являются две равноценные по динамическим качествам схемы расположения кривошипов КВ, показанные на рис. 3.24, а, б.
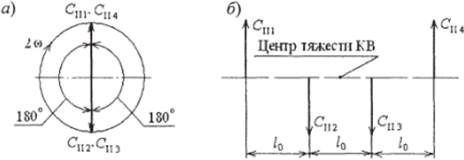
Рис. 3.23. Равномерная продольно-симметричная схема расположения фиктивных радиус-векторов сил инерции второго порядка С": а — равномерное расположение радиус-векторов по окружности; б — продольно-симметричное расположение радиус-векторов относительно центра тяжести КВ Каждая из крестообразных схем, показанных на рис. 3.24, а, б, обеспечивает самоуравновешенность двигателя 84V900 по признакам (5) и (6). Очевидно, что при наличии крестообразного коленчатого вала XQ = ОТаким образом, задача уравновешивания двигателя 84V900 с таким КВ сводится к уравновешиванию продольного момента X^q;
Для дальнейшего рассмотрения принимается за основу схема, показанная на рис. 3.24, а.
Значение радиус-вектора продольного момента X^q определяется в соответствии с продольной схемой расположения кривошипов КВ и радиус-векторов Q, показанной на рис. 3.25.
Значение радиус-вектора продольного момента, создаваемого силами Qj и Qv расположенными в вертикальной плоскости, определяется по выражению Л/^, 4) = 3QIq. Значение радиусвектора продольного момента, создаваемого силами Q2 и Qv расположенными в горизонтальной плоскости, определяется по выражению Mq^ 2 3) = Ql0.
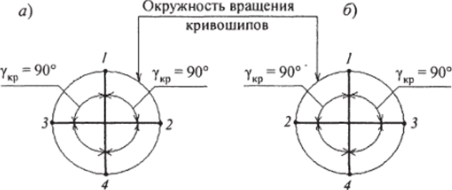
Рис. 3.24. Равноценные по динамическим качествам равномерные продольнонесимметричные схемы расположения кривошипов /. .4, получаемые «сворачиванием» фиктивных радиус-векторов С".
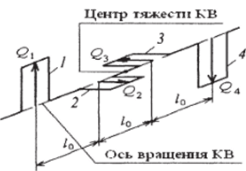
Рис. 3.25. Равномерная продольно-несимметричная схема расположения кривошипов I…4 и радиус-векторов QV.Q4
Значение результирующего радиус-вектора продольного момента определяется геометрическим сложением составляющих радиус-векторов и рассчитывается по выражению.

Положение составляющих радиус-векторов и результирующего радиус-вектора продольного момента определяется указанным далее способом.
Плоскость первого кривошипа совмещается с положительным направлением оси координат Y. Радиус-вектор А/^, 4) будет располагаться перпендикулярно плоскости действия сил Qx и Q4. Направление радиус-вектора продольного момента определяется по правилу «бурава»: если под действием пары сил Q «бурав» вворачивается, то радиус-вектор момента направляется в сторону его вворачивания (перпендикулярно плоскости действия пары сил); если под действием пары сил Q «бурав» выворачивается, то радиус-вектор момента направляется в сторону его выворачивания.
Соответствующее положение составляющих радиус-векторов А/^, 4) и и результирующего продольного момента YMq.
показано на рис. 3.26.

Рис. 3.26. Взаимное расположение кривошипов-1 …4, результирующих радиусвекторов сил Qx…Q4 и радиус-векторов продольных моментов от этих сил Радиус-вектор результирующего продольного момента YMq при показанном на рисунке положении кривошипов КВ образует с осью координат Xугол 18°26 Радиус-вектор YMq занимает по отношению к схеме расположения кривошипов неизменное положение и вращается вместе с КВ с угловой скоростью со. Это позволяет определить положение плоскости, в которой должны находиться вынесенные за пределы первого и четвертого отсеков вращающиеся массы для уравновешивания результирующего радиус-вектора продольного момента YMq •.