Замкнутые системы регулируемого электропривода
Принципы построения замкнутых систем ЭП. Замкнутые структуры ЭП строят на основании двух принципов: компенсации внешнего возмущения и устранения отклонения регулируемого параметра от заданного значения. Силовую часть замкнутых систем регулируемого ЭП, как правило, выполняют по структуре «преобразователь — двигатель», в которой основное управляющее воздействие на электродвигатель оказывает… Читать ещё >
Замкнутые системы регулируемого электропривода (реферат, курсовая, диплом, контрольная)
В замкнутых системах регулируемого ЭП механическая характеристика двигателя формируется автоматической системой, охваченной отрицательной обратной связью по принятым параметрам регулирования. При этом вид механической характеристики в рабочей области практически не зависит от типа используемого в ЭП двигателя. Действительно, если рассматривать замкнутую автоматическую систему как регулятор с передаточной функцией IVp(р), который охвачен звеном отрицательной обратной связи с передаточной функцией lV0C(p), то в соответствии с правилами преобразования структурных схем передаточная функция такого соединения будет:

Преобразовывая (1.75) к удобному для анализа виду, далее получаем:

Так как в прямом канале передачи сигнала регулятора используют усилительные каскады с большим коэффициентом усиления (передачи), то Жр(р)" WQC(p) и (1.76) допустимо представить в виде:

Соотношение (1.77) подтверждает то, что в замкнутых автоматических системах, в том числе и регулируемого ЭП, динамические свойства системы определяются в основном передаточной функцией канала отрицательной обратной связи.
Типы замкнутых систем регулируемого ЭП. Замкнутые автоматические системы регулирования координат ЭП выполняют в основном двух типов: с общим суммирующим усилителем (рис. 1.24, а) и с несколькими последовательными усилителями — так называемые системы подчиненного регулирования (рис. 1.24, б).
Системы регулируемого ЭП с общим суммирующим усилителем содержат в качестве регулятора, охваченного отрицательной обратной связью, магнитные или электромагнитные усилители с несколькими независимыми обмотками управления.
Системы подчиненного регулирования получили наибольшее распространение как более функциональные и гибкие. К ним относят современные регулируемые полупроводниковые ЭП типа УВ—Д (управляемый выпрямитель — двигатель), ШИП—Д (широтно-импульсный преобразователь— двигатель), ТПЧ—АД (тиристорный преобразователь частоты — асинхронный двигатель), ТПН—АД (тиристорный преобразователь напряжения — асинхронный двигатель) и др.
На рисунке 1.25 в качестве примера представлены схема и механические характеристики замкнутой системы регулируемого ЭП переменного тока типа ТПН—АД.
За счет действия отрицательной обратной связи по угловой скорости жесткость искусственных механических характеристик.
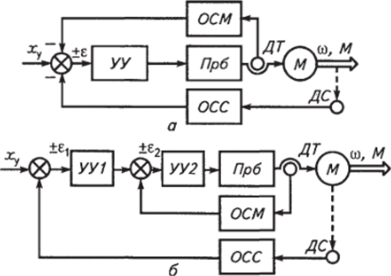
Рис. 1.24. Функциональные схемы замкнутых систем регулируемого ЭП с общим суммирующим усилителем (а) и подчиненного управления (б):
УУ, УУ1, УУ2 — устройства управления (усиления); Прб — преобразователь; ОСС и ОСМ— согласующие звенья отрицательной обратной связи соответственно по скорости и моменту двигателя; ДС и ДТ— датчики (измерительные преобразователи) скорости и тока двигателя; Ху — сигнал управления (задания); ±с — ошибка регулирования.
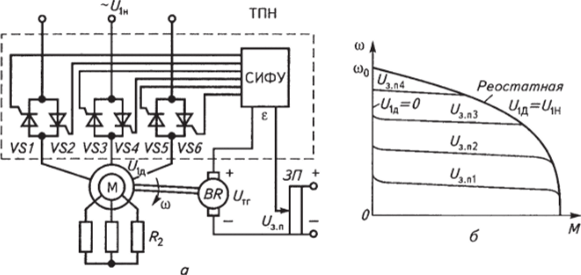
Рис. 1.25. Функциональная схема (а) и механические характеристики (б) замкнутой системы регулируемого ЭП переменного тока типа ТПН—АД:
ТПН— тиристорный преобразователь напряжения; СИФУ— система импульсно-фазового управления; BR — датчик угловой скорости (тахогенератор); ЗП— задающий потенциометр; 0— напряжение ЗП; Uin*> UJnз> Uy«2> Uxn
резко повышается. Такие ЭП могут работать с заданной угловой скоростью как при постоянной, так и переменной нагрузках.
Если, например, при определенной, заданной потенциометром ЗП угловой скорости АД произойдет увеличение нагрузки на его валу, то угловая скорость ротора АД, а вместе с ней и напряжение UTr на выходе тахогенератора BR начнут уменьшаться. Это приведет к появлению и увеличению сигнала ошибки регулирования е на входе системы импульсно-фазового регулирования (СИФУ) тиристорного преобразователя напряжения (ТПН). В результате угол включения тиристоров ТПН уменьшится, напряжение на зажимах АД возрастет и угловая скорость двигателя останется практически без изменения.
На рисунке 1.26 приведена типовая схема и механические характеристики регулируемого ЭП постоянного тока типа УВ—Д с подчиненным регулированием координат угловой скорости и момента (тока).
Цепь якоря ДПТ НВ получает питание от управляемого выпрямителя УВ, подключенного к сети переменного тока. Уровень выходного постоянного напряжения УВ задается углом а включения его тиристоров. С валом ДПТ соединен тахогенератор BR, напряжение обратной связи Uoc которого сравнивается с напряжением U3 C заданной угловой скорости на входе регулятора скорости PC, выполненного на операционном усилителе.
Напряжение отрицательной обратной связи t/0T по току (вращающему моменту) двигателя, снятое с измерительного шунта Лш,.

Рис. 1.26. Функциональная схема (а) и механические характеристики (б) замкнутой системы регулируемого ЭН постоянного тока типа УВ—Д:
PC, РТ — регуляторы скорости и тока (момента); СИФУ— система импульсно-фазового управления; УВ — управляемый выпрямитель; ДТ — датчик тока (момента); BR — датчик угловой скорости (тахогснсратор); (/" «> Ua > U, 2 > 11я3 (а в 0; а < а1 < а2 < аЗ) включенного в цепь якоря, поступает на вход второго операционного усилителя, являющегося регулятором тока (момента) РТ, где сравнивается с напряжением изт задания тока (момента), снимаемым с выхода регулятора скорости PC.
Выходное напряжение управления Uy регулятора РТ подается в систему импульсно-фазового управления (СИФУ) выпрямителем УВ и соответствующим образом изменяет его выходное напряжение, поступающее на обмотку якоря ДПТ.
Ограничение тока якоря ДПТ, а соответственно и его вращающего момента обеспечивается стабилитронами VDJ и VD2, которые ограничивают входное напряжение регулятора тока РТ на уровне их напряжения стабилизации. Тем самым ограничивается выходное напряжение управляемого выпрямителя УВ и соответственно допускаемый вращающий момент двигателя на уровне М>го (рис. 1.26, 6).
Задающее напряжение U3C может поступать в систему управления ЭП от задатчика частоты вращения, интенсивности пуска или программного устройства. Для исключения режима прерывистого тока якоря при возможных малых нагрузках на валу двигателя и больших углах включения (управления) тиристоров выпрямителя УВ, как уже отмечалось ранее, в цепь якоря включен сглаживающий дроссель Lfa. На механических характеристиках рисунка 1.26, б зона прерывистых токов заштрихована.
Настройку системы подчиненного регулирования ЭП начинают с регулятора тока (момента) РТ и заканчивают регулятором скорости PC, то есть с внутреннего контура к наружному. По схеме рисунка 1.26 выполнены комплектные ЭП постоянного тока с управляемыми выпрямителями серий ЭТЗ и ЭТ6.
Принципы построения замкнутых систем ЭП. Замкнутые структуры ЭП строят на основании двух принципов: компенсации внешнего возмущения и устранения отклонения регулируемого параметра от заданного значения. Силовую часть замкнутых систем регулируемого ЭП, как правило, выполняют по структуре «преобразователь — двигатель», в которой основное управляющее воздействие на электродвигатель оказывает напряжение для ДПТ и частота и напряжение для АД и СД. Для выработки законов управления двигателем, которые реализуются силовым преобразователем, замкнутые системы регулируемого ЭП содержат дополнительно определенный состав управляющих элементов. Это прежде всего задающие и программные устройства, измерительные преобразователи (датчики) регулируемых координат и технологического процесса, согласующие элементы для соединения всех звеньев ЭП в единую систему и др.
Основное преимущество замкнутых систем регулируемого ЭП перед незамкнутыми состоит в жестком поддержании заданных параметров регулирования (угловой скорости, вращающего момента, ускорения и т. д.) при изменяющихся внешних воздействиях (изменение нагрузки, изменение условий электропитания и т. д.). Кроме того, замкнутые системы регулируемого ЭП, несмотря на их более высокую сложность, позволяют более гибко формировать характер переходных процессов в электроприводе и добиваться более благоприятного их протекания.