Кинематические поверхности.
Инженерная 3d-компьютерная графика
А — торс; б — косая плоскость; в — косой цилиндр с тремя криволинейными направляющими ров, полученных приданием поверхности толщины, приведен на рис. 25.1. Поверхность с толщиной приобретает вид условной детали, к которой можно применять технологические операции, например, просверлить крепежные отверстия (рис. 25.1), обрезать по контуру сопряжения с другими деталями. Реалистичная визуализация… Читать ещё >
Кинематические поверхности. Инженерная 3d-компьютерная графика (реферат, курсовая, диплом, контрольная)
Кинематическими называют поверхности, создаваемые перемещением образующей линии или поверхности по заданному алгоритму. Алгоритм может быть задан одной или несколькими направляющими, определяет положение образующей и изменение ее формы в процессе перемещения.
Выше (см. гл. 19—24) нами были рассмотрены и построены следующие кинематические поверхности. Наклонный (архимедов) и прямой геликоиды как рабочая поверхность резьбы; эвольвентные цилиндр и конус как рабочие поверхности зубчатых колес; наклонный, эвольвентный и конволютный геликоиды как рабочие поверхности червяка в червячной передаче. К числу сложных следует отнести поверхность впадины червячного колеса, формируемую обкаткой колеса производящим червяком, а также поверхность глобоидного червяка, полученную вращением отрезка прямой относительно двух скрещивающихся осей.
Поверхность как объект AutoCAD’a — это пленка, имеющая нулевую толщину. В поверхности можно выполнять отверстия, ее можно обрезать по заданному контуру. Сама поверхность может быть режущей кромкой для других поверхностей и тел.
Простейший прием преобразования кинематической поверхности в solidобъект — придание ей толщины командой thicken (Толщина). Ряд приме;
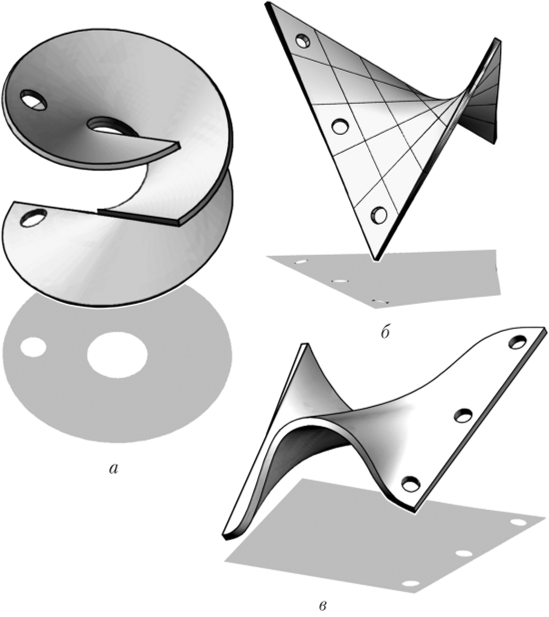
Рис. 25.1. Модели кинематических поверхностей:
а — торс; б — косая плоскость; в — косой цилиндр с тремя криволинейными направляющими ров, полученных приданием поверхности толщины, приведен на рис. 25.1. Поверхность с толщиной приобретает вид условной детали, к которой можно применять технологические операции, например, просверлить крепежные отверстия (рис. 25.1), обрезать по контуру сопряжения с другими деталями. Реалистичная визуализация эффектно выполняется средствами AutoCAD.
Построение торса (см. рис. 25.1, а) — эвольвентного геликоида — рассмотрено в и. 20.4.
Косую плоскость (см. рис. 25.1, б) — гиперболический параболоид — можно получить, построив первоначально пространственный четырехугольник. Для этого следует создать параллелепипед (см. рис. 25.6), затем на его боковых гранях построить диагональные отрезки, указывая вершины с объектной привязкой. К отрезкам как к каркасу поверхности применить команду loft. Два противоположных отрезка следует указать как образующие, а два других — как направляющие.
Модель штампованной детали (см. рис. 25.1, в) получена на основе кинематической поверхности — косого цилиндра с тремя криволинейными направляющими. Это сложная линейчатая поверхность, образованная движением прямой линии так, что в каждый момент она пересекает три предварительно заданные направляющие — пространственные кривые линии.
Рассмотрим построение этой интересной поверхности [23]. Пусть заданы три направляющие п1, п2, пЗ (рис. 25.2, а), взаимное положение которых допу;
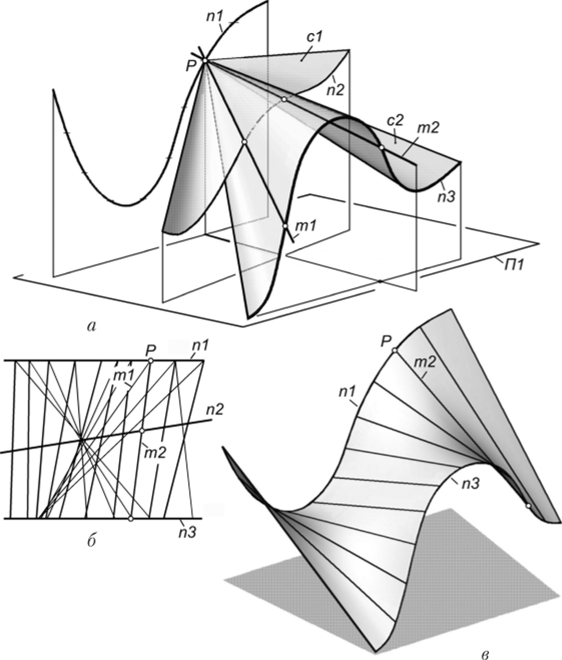
Рис. 25.2. Поверхность цилиндра с тремя криволинейными направляющими:
а — построение образующих; б — множество образующих, вид сверху; в — сетевая поверхность, полученная «лофтированием»
скает построение косого цилиндра. Чтобы повторить наш пример, постройте направляющие как сплайны по 9—12 точкам:
- ? перейдите в окно аксонометрии и установите МСК;
- ? spline / 0, 80, 60 / 10, 80, 38 / 23,' 80, 22 / 38, 80, 1 б / 52, 80, 24 / 60, 80, 39/71, 80,55 / 87,80, 66 / 101,80, 69 /// - направляющая п1;
- ? spline / -2.2, 33.1, 22.7 / 5.9,34.4, 20.1 / 28.1, 37.9, 27.4 / 38.9, 39.6, 36 / 52.3, 41.7, 46 / 68.1, 44.2, 50 / 82.9, 46.5, 50 / 91, 47.8, 51.1 / 105.1, 50, 57.6 ///— направляющая п2;
- ? spline / 0, 0, 0 / 7, 0, 3 / 14, 0, 15 / 20, 0, 34 / 25, 0, 46 / 36, 0, 55 / 51, 0, 54 / 62, 0, 44 / 69, 0, 32 / 78, 0, 26 / 90, 0, 27 / 100, 0, 31 /// - направляющая пЗ.
На направляющей п1 равномерным делением (divide) ставим маркеры 8—10 точек. Будем искать образующие, проходящие через эти точки.
Выберем в качестве примера маркер точки Р. Строим коническую поверхность с1 с вершиной в точке Р и направляющей п2. Для этого соединяем точку Р отрезками прямых с конечными точками направляющей п2, для повышения точности можно построить еще несколько отрезков, соединяющих точку Рс направляющей п2. Выполняем команду loft, указывая эти отрезки в качестве образующих конической поверхности, а кривую п2 — в качестве направляющей. Можно кривую п2 и маркер точки Рзадать как образующие, а отрезки прямых — как направляющие.
Аналогично строим вторую коническую поверхность с2, вершина которой находится в той же точке Р, а направляющей является кривая пЗ. Командой interfere находим пересечение конических поверхностей с1 и с2. Поскольку у них общая вершина Р, то пересечение будет происходить по прямым линиям. В нашем примере пересечение происходит по двум прямым т1, m2. Эти прямые являются образующими искомой поверхности, проходящими через точку Р. Каждая из образующих пересекает три заданные направляющие п 1, п2, пЗ.
Выбрав маркер другой точки, расположенной на направляющей п1, повторяем построения и находим образующие для этой точки. Наличие 2—3 образующих, выходящих из одной точки, указывает на множество поверхностей, отвечающих заданным условиям (рис. 25.2, б).
Из найденных образующих выбираем те, которые задают плавную поверхность, без самопересечения. Их хорошо видно на виде сверху. Поверхность получаем командой loft, указав выбранные образующие. Для более высокой точности можно добавить в каркас и направляющие п1 — пЗ. Предварительно убедитесь в том, что все образующие пересекают все направляющие с предельной точностью, проверяемой объектной привязкой Int. Если из-за недостаточной точности построения имеются микрозазоры между образующими и направляющими, их следует устранить.
Выбрав другие образующие, получим другую поверхность.
Поверхность с 8—10 точками разбиения направляющей п 1 можно построить вручную. Для более высокой точности следует применять программную реализацию алгоритма построения.
После построения поверхности ей можно придать толщину и рассматривать как модель штампованной детали (см. рис. 25.1, в). Поверхность можно применить как режущую грань в команде slice и создать solid-объект, содержащий эту поверхность (см. п. 25.3).