Описание объектов проектирования
При перемещении якоря 1 дифференциального индуктивного преобразователя с переменной площадью воздушных зазоров (ДПИП) изменяются сопротивления катушек zxX и zx2. В результате нарушается равновесное состояние мостовой схемы включения СВ и в ее измерительной диагонали ab появляется напряжение, зависящее от перемещения якоря х. ДПИП и СВ образуют дифференциальный индуктивный датчик. С помощью… Читать ещё >
Описание объектов проектирования (реферат, курсовая, диплом, контрольная)
Объектом проектирования является индуктивный измерительный прибор (ИНДИП), предназначенный для измерения заданной физической величины А'и: линейного перемещения, давления, силы, линейного ускорения или вибраций. Отличительной особенностью таких приборов является наличие в них индуктивного измерительного преобразователя, с помощью которого измеряемая физическая величина преобразуется в изменение полного электрического сопротивления катушки (или двух катушек в случае дифференциального индуктивного преобразователя).
Подробное описание индуктивных датчиков и методики их расчета даны в гл. 3 «Расчет и проектирование индуктивных измерительных приборов» работы автора [29]. Ниже приводятся основные сведения.
Принципиальные схемы ИНДИП. Индуктивные измерительные преобразователи имеют простую конструкцию, малую инерционность, незначительные габариты и массу, большую выходную мощность, а также малую чувствительность к изменениям условий эксплуатации. Они обладают большой надежностью, относительно дешевы, технологичны в изготовлении и не требуют для своего производства дефицитных материалов. Их используют для измерения не только линейного перемещения, но и других физических величин, которые можно преобразовать в перемещение с помощью различных предварительных преобразователей. На рис. П4.1 показано применение индуктивного преобразователя (ИП) для измерения давления (рис. П4.1, а), ускорения (рис. П4.1, б) и силы (рис. П4.1, в). В качестве предварительного преобразователя в этих случаях используются, соответственно, мембрана 1, инерционная масса 2 и кольцевой упругий элемент 3.
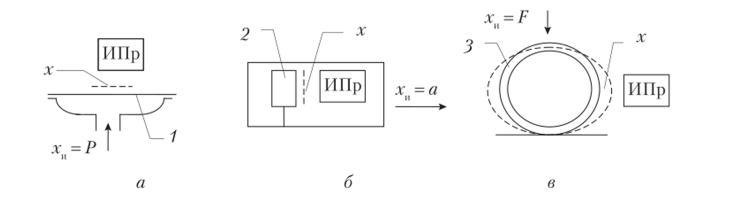
Рис. П4.1
Функциональные схемы ИНДИП. Индуктивные измерительные приборы строятся по схеме прямого или уравновешивающего преобразования, которое может быть компенсационным или следящим. Соответствующие приборы обозначаются аббревиатурами ИНДИП-ПП, ИНДИП-КП и ИНДИП-СП. Функциональные схемы таких приборов показаны на рис. П4.2.
Приборы прямого преобразования. В приборах прямого преобразования (см. рис. П4.2, а) измеряемая величина хк с помощью предварительного преобразователя ПП преобразуется в перемещение х якоря дифференциального индуктивного преобразователя ДИП, что приводит к изменению сопротивлений гхЛ и zx2 его катушек. Катушки ДИП включаются в мостовую схему переменного тока (схему включения СВ). При изменении сопротивлений катушек в измерительной диагонали моста возникает электрическое напряжение f/д =siп (о)п? + фд), являющееся частью напряжения питания моста Un = Д, sin (wп?). Его амплитуда Лп зависит от степени разбаланса моста и, следовательно, от измеряемой величины хи, фаза фд — от знака разбаланса, а частота сод совпадает с частотой напряжения питания моста.
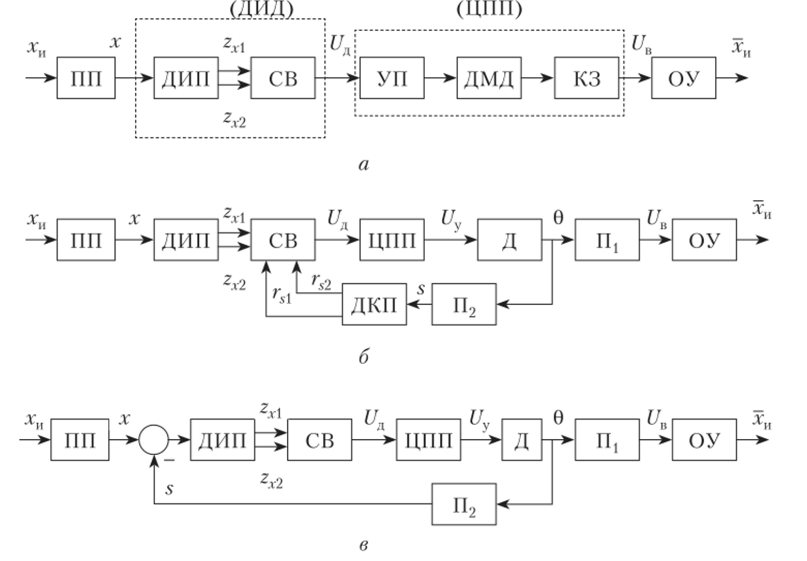
Рис. 114.2.
Совокупность ДИП и СВ образует дифференциальный индуктивный датчик перемещения ДИД. Он является наиболее ответственным элементом прибора. Последующие звенья прибора (усилитель-преобразователь УII, демодулятор ДМД и корректирующее звено КЗ) образуют день промежуточных преобразователей ЦПП, с помощью которых выходной сигнал датчика UA преобразуется в напряжение постоянного тока Uu. Это напряжение поступает на вход отсчетного устройства ОУ (цифрового или стрелочного). Его роль может выполнять вольтметр, шкала которого отградуирована в единицах измеряемой физической величины хи или специальное устройство (микроконтроллер), в котором кроме индикации результата измерений хИ предусмотрены линеаризация статической характеристики прибора, коррекция погрешностей, первичная обработка измерительного сигнала и пр.
Параметры цепи подбираются так, чтобы общая статическая характеристика прибора совпадала с его желаемой характеристикой хИ =хИ или была достаточно близка к ней (в пределах допустимой погрешности). Для достижения высокой точности измерений все звенья прибора должны иметь малые погрешности, так как суммарная погрешность ИНДИП-ПП равна сумме погрешностей его звеньев.
Приборы уравновешивающего компенсационного преобразования.
ИНДИП-КП (см. рис. П4.2, б) содержат реверсивный двигатель Д и цепь отрицательной обратной связи, куда входят редуктор П2 и дифференциальный компенсационный потенциометр ДКП. Напряжение Ua с выхода индуктивного датчика после преобразования в цепи промежуточных преобразователей поступает в управляющую обмотку реверсивного двигателя Д, что приводит к повороту вала двигателя на угол, от величины которого зависит показание прибора хн. Вал двигателя связан с подвижным контактом (щеткой) ДКП. При вращении вала она перемещается на величину 5, от которой зависят сопротивления двух половин потенциометра rs{ и rs2, также включенных в схему моста. Направление перемещения щетки (и вала двигателя) таково, что с течением времени степень разбаланса моста уменьшается и в установившемся режиме становится равной нулю. Соответствующее установившееся показание прибора хи зависит от измеряемой величины хи. Зависимость хи от хи определяет статическую характеристику прибора.
Такие приборы имеют более сложную конструкцию и меньшее быстродействие, чем ИНДИП-ПП. Однако они могут обладать более высокой точностью. Это связано с тем, что погрешности звеньев, охваченных отрицательной обратной связью, в меньшей степени сказываются на показании ИНДИП-КП, чем ИНДИП-ПП.
Приборы уравновешивающего следящего преобразования.
В ИНДИП-СП отрицательная обратная связь «заводится» непосредственно на вход прибора (см. рис. П4.2, в). В этом случае перемещение якоря ДИП, приводящее к разбалансу мостовой схемы, вызывает перемещение сердечника (корпуса ДИП) в том же направлении и на ту же величину. В таком приборе увеличивается число звеньев, охватываемых отрицательной обратной связью, что ведет к дальнейшему повышению точности измерений. Однако приборы следящего преобразования (так же как и ИНДИП-КП) подвержены опасности потери устойчивости, что проявляется в возможности возникновения в них автоколебаний.
Индуктивные измерительные преобразователи. В зависимости от варианта задания в разрабатываемом приборе могут использоваться ДИП с переменной величиной воздушного зазора (ДЗИП), с переменной площадью воздушного зазора (ДПИИ), или индуктивные преобразователи соленоидного типа (ДСИП). На рис. П4.3 показаны принципиальные схемы этих измерительных преобразователей.
Все они состоят из двух идентичных одинарных индуктивных преобразователей (катушек), имеющих общий якорь. При перемещении якоря сопротивление одной катушки (гх1) увеличивается, а другой (zx2) — уменьшается (см. рис. П4.10). В работе[1] дано описание конструкций индуктивных преобразователей перемещений.
Схемы включения. Для преобразования изменений сопротивлений катушек ДИП в первичный измерительный сигнал используются мостовые симметричные схемы переменного тока. В зависимости от способа включения катушек схема включения может быть последовательно-симметричной (ПОСМ) или параллельно-симметричной (ПРСМ) (рис. II4.4).
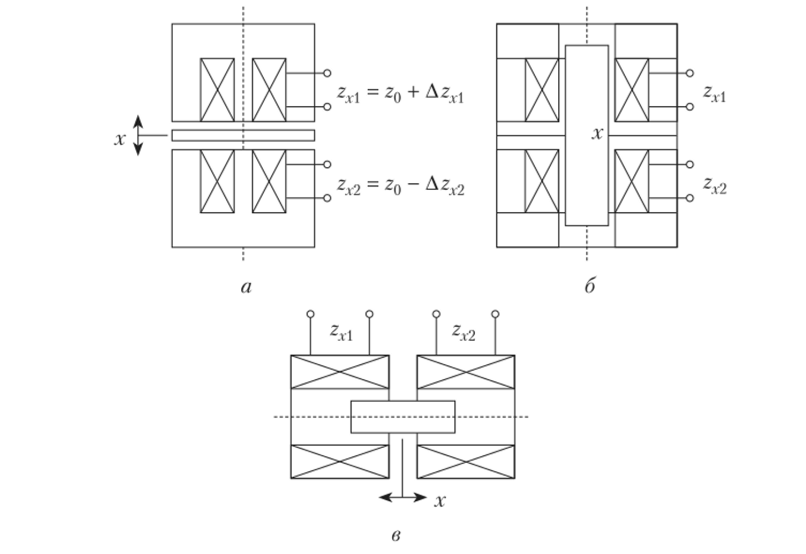
Рис. П4.3
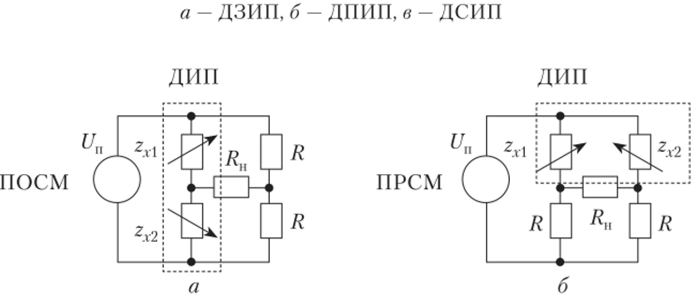
Рис. П4.4
В первом случае катушки включаются последовательно, во втором параллельно. Последовательно-симметричная схема допускает использование низкоомных преобразователей, которые могут шунтировать источник питания. Кроме того, схемы ПОСМ и ПРСМ различаются зависимостью напряжения в измерительной диагонали моста от сопротивлений катушек ДИИ 2х1 и zx2 (см. (П4.2), (П4.3)).
Если объектом проектирования является ИНДИП-КП, то схемы, показанные на рис. П4.4, дополняются дифференциальным (со средней точкой) компенсационным потенциометром ДКП (рис. П4.5).
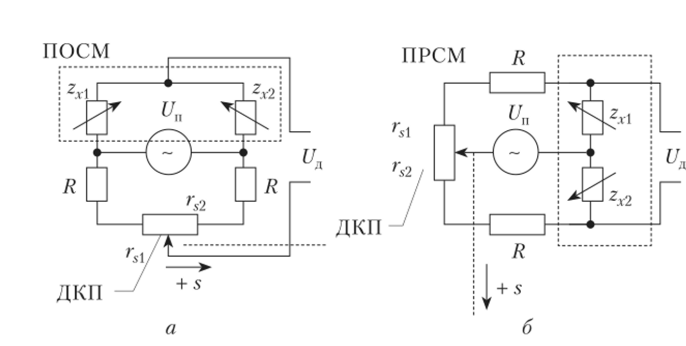
Рис. 1145.
Примеры конструкций приборов. Принципиальная схема и конструкция конкретного варианта прибора разрабатываются самостоятельно путем сочетания базовых элементов прибора, указанных в индивидуальном варианте задания. Из них нужно «собрать» прибор, предназначенный для измерения заданной физической величины.
На рис. П4.6, а показана схема датчика индуктивного акселерометра. В нем используется дифференциальный индуктивный преобразователь с переменной величиной воздушного зазора (ДЗИП). Его катушки 5 включаются в мостовую схему с помощью подводящих проводов 1, а роль инерционной массы выполняет якорь 4, закрепленный в центрах двух плоских пружин (мембран) 3У выполняющих роль упругого подвеса. Необходимое демпфирование обеспечивается вязкой жидкостью, заполняющей внутреннюю полость корпуса 1. Если используется другой тип индуктивного преобразователя (ДПИП или ДСИП), то приведенный вариант конструкции датчика нуждается в доработке.
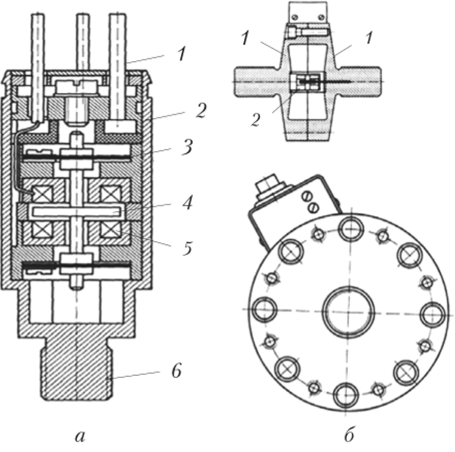
а б.
Рис. П4.6
На рис. П4.6, б показана схема датчика индуктивного динамометра. В нем измеряемое усилие воздействует на упругий элемент, выполненный в виде двух тарельчатых мембран У, а в качестве основного измерительного преобразователя используется дифференциальный индуктивный преобразователь соленоидного типа (ДСИП).
На рис. 2.2 (гл. 2) показаны два варианта конструкции индуктивных датчиков давления.
В датчике на рис. 2.2, а при изменении давления контролируемой среды хи = Р изменяется зазор между мембраной М и сердечником 3 полудифференциального индуктивного преобразователя. В результате изменяется индуктивность рабочей катушки преобразователя 1. Катушка 2 служит для компенсации влияющих факторов. Соединение датчика с последующими преобразователями осуществляется через электрический разъем 4. В таком датчике чувствительным элементом прибора является мембрана М, а предварительным преобразователем — трубопровод, соединяющий датчик с объектом измерений (на рис. П4.6, а не показан). Если трубопровод отсутствует (датчик ввертной), то предварительный преобразователь также отсутствует.
В датчике на рис. 2.2, 6 чувствительным элементом является трубка Бурдона 3, с помощью которой давление контролируемой среды преобразуется в перемещение якоря 1 дифференциального соленоидного индуктивного преобразователя 2. Использование такого преобразователя способствует снижению погрешностей прибора.
На рис. П4.7 показана схема индуктивного измерительного прибора следящего преобразования.
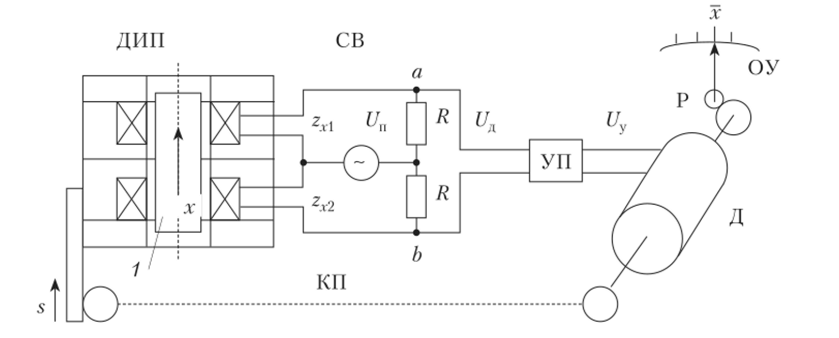
Рис. II4.7
При перемещении якоря 1 дифференциального индуктивного преобразователя с переменной площадью воздушных зазоров (ДПИП) изменяются сопротивления катушек zxX и zx2. В результате нарушается равновесное состояние мостовой схемы включения СВ и в ее измерительной диагонали ab появляется напряжение, зависящее от перемещения якоря х. ДПИП и СВ образуют дифференциальный индуктивный датчик. С помощью усилителя — преобразователя УП выходное напряжение датчика [7Д преобразуется в напряжение ?/у, поступающее в управляющую обмотку двигателя Д. С помощью кинематической передачи КП вал двигателя связан с корпусом ДИП, а с помощью редуктора Р — с отсчетным устройством ОУ. При вращении вала корпус ДИП перемещается в направлении, совпадающим с направлением измеряемого перемещения. По завершении переходного процесса устанавливается равенство перемещенийi = sn восстанавливается равновесное состояние моста. Соответствующее показание прибора х является результатом измерений.
На рис. П4.8 показана схема индуктивного динамометра компенсационного преобразования.
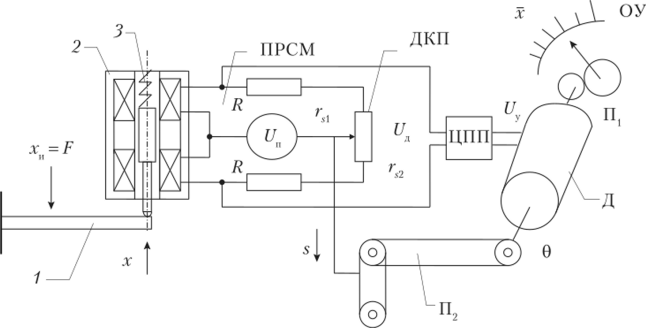
Рис. П4.8
Измеряемое усилие х"= F с помощью упругого элемента 1 (балки) преобразуется в перемещение х якоря ДСИП 2. Его катушки включены в параллельно-симметричную мостовую схему переменного тока (ПРСМ). Пружина 3 обеспечивает необходимое измерительное усилие Е0 (см. (П4.11)). Цепь отрицательной обратной связи образована лентопротяжным механизмом П2, а цепь II, — редуктором, выходная ось которого связана со стрелочным отсчетным устройспюм.
В работе[2] дано описание вариантов конструкций индуктивных измерительных приборов.