Разностная аппроксимация дифференциальных уравнений внутрикамерного процесса
Отметим, что при расчете ГЖТМС, включающих большое количество типовых сосудов, число переменных интегрирования К достаточно велико. При этом нецелесообразно задавать большое число допустимых абсолютных погрешностей параметров ек. Удобнее задать допустимое значение относительной погрешности 8 одно для всех переменных, а абсолютные погрешности рассчитывать как. При NpK = 1 формула (3.61) задает… Читать ещё >
Разностная аппроксимация дифференциальных уравнений внутрикамерного процесса (реферат, курсовая, диплом, контрольная)
Явные схемы Рунге — Кутта второго-четвертого порядка точности
Система дифференциальных уравнений (3.3)—(3.12) с соответствующими замыкающими соотношениями позволяет решать практически все задачи внутренней баллистики многополостных пиромеханизмов в классической постановке без учета перетока пороховых зерен из объема в объем. Будучи дополненными алгоритмами расчета газоприхода в условиях перетока зерен пороха из объема в объем, описанными в предыдущем разделе, эти уравнения позволяют построить модели для описания внутренней баллистики таких многополостных механизмов, в том числе систем разделения реактивных снарядов, в которых отсутствуют протяженные полости с возможным развитием в них нестационарных газодинамических процессов. В рамках реализующего описываемую методику программного комплекса конечно-разностная аппроксимация уравнений (3.3)—(3.12) строится на базе использования явных схем Рунге — Кутта 1—4 порядка точности. Все доступные для использования разностные схемы могут быть представлены в следующей общей форме. На сетке по времени {!",}", = i для системы уравнений.

расчетные формулы задаются соотношениями.

где At = tm+1 — tm;

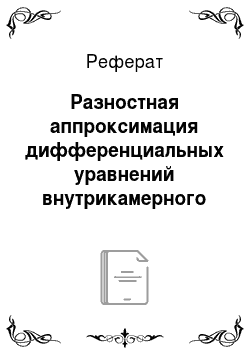
Если NpK — порядок используемой схемы Рунге — Кутта, задаваемый при расчете, то для.
При NpK = 1 формула (3.61) задает явную схему Эйлера, а при NpK = = 4 — классическую формулу Рунге — Кутта 4-го порядка точности. Представление расчетных формул в виде (3.61) позволяет удобно размещать промежуточную информацию в памяти компьютера и рассчитывать на каждом шаге по времени столько правых частей К, каков порядок NpK используемой схемы Рунге — Кутта.
Способы задания шага по времени
Расчет реальных процессов функционироавния пиромеханизмов систем разделения реактивных снарядов и головных частей, описанных в настоящем издании, вряд ли возможен на сетках с постоянным шагом по времени. Это является следствием чередования процессов воспламенения импульсных вышибных зарядов в полостях и процессов последующего расширения или сжатия рабочих тел, которые могут иметь весьма различные временные масштабы. При этом необходимо использовать сетки с переменным шагом по времени, причем величина шага должна выбираться по задаваемой точности расчета автоматически в зависимости от развития внутрибаллистического процесса.
В отдельных случаях, например, при решении модельных задач, когда особенности рассчитываемого процесса легко прогнозируются, может использоваться простейший способ — задание сетки по времени в виде таблицы шагов переменного размера, меняющегося при заданных номерах шагов.
В качестве автоматизированных способов, обеспечивающих адаптацию сетки по времени к особенностям развития вычислительного процесса, реализовано два способа [14] — способ, основанный на использовании метода Рунге, и способ, основанный на вычислении «контрольного члена», задающего главный член локальной погрешности интегрирования.
При использовании метода Рунге оценка локальной погрешности на шаге интеграрования может быть представлена следующим образом.

где К — число переменных в решаемой системе дифференциальных уравнений (СДУ); Ут+i — решение СДУ в момент tm+1, полученное из решения в момент tm в результате расчета двух шагов по времени разме;
AtU)+i j
ром —-— = -(tm+1 — — решение СДУ в момент fm+1, получен;
2 2.
ное из решения в момент tm в результате расчета одного шага по времени размером At^+i = tm+1 — tm.
Проверяется допустимость полученной погрешности решения. При этом, если при некотором к
где е*. — наперед заданное значение абсолютной погрешности пременной с номером к, то рассчитанные значения у,"+1 иу?+1 исключаются из рассмотрения. Выбирается новое значение шага.

и процесс расчета повторяется, пока оценка локальной погрешности не будет удовлетворять условию.

Если оценка локальной погрешности на шаге AtnV+i = tm+i - удовлетворяет неравенствам.

то считается, что достигнута точность расчета, превышающая заданную, и шаг интегрирования удваивается. То есть полагается, что.

и расчет продолжается с шагом Atm+2 от решения у^+1, к = 1,2,…, К. Если выполняется неравенство.

то считается, что полученное в точке tm+1 решение удовлетворяет заданной точности и шаг интегрирования оставляется без изменения.
а расчет продолжается от решения y?+i, fc = 1, 2,…, К.
Отметим, что при расчете ГЖТМС, включающих большое количество типовых сосудов, число переменных интегрирования К достаточно велико. При этом нецелесообразно задавать большое число допустимых абсолютных погрешностей параметров ек. Удобнее задать допустимое значение относительной погрешности 8 одно для всех переменных, а абсолютные погрешности рассчитывать как.

При этом, однако, в случае, если значение |ут+1| достаточно мало, весьма малой окажется и величина ек. Это может привести к зацикливанию при расчете, так как величина шага Atm+2, определяемого алгоритмом, окажется за пределами числа верных цифр в машинном представлении времени.

так что tm+2 и tm+1 будут восприниматься компьютером как одно число. Аналогично, при очень маленьком шаге по времени приращение решения в формуле (3.61) будет находиться за пределами значащих цифр в машинном представлении числа, и численное решение перестанет изменяться. Такая ситуация возможна, например, при расчете с автоматическим выбором шага процесса с нулевыми начальными условиями. В этом случае расчеты компьютером проводятся, а изменения параметров, включая расчетное время t, не наблюдается.
Для исключения этого явления при малых значениях ек следует пользоваться задаваемым заранее допустимым значением ек абсолютной погрешности решения. Окончательно в качестве гк используется.

Описанный способ выбора шага удобен тем, что может применяться для всех схем Рунге — Кутта. Однако он весьма неэкономичен, так как требует троекратного решения исходной СДУ даже в тех точках по времени, в которых деления шага пополам не делается. Кроме того он весьма груб, так как критерий выбора мрмента деления или удвоения шага основан на использовании неравенства (3.62), в котором при NpK = 4 левая граница в 32 раза меньше правой. Поэтому реальный алгоритм расчета строится так, чтобы проверка необходимости смены шага интегрирования делалась не на каждом шаге по времени, а через заданное число шагов, просчитываемое с постоянным шагом, например 3, 5, 10 и т. п. При этом, однако, возможна потеря точности, если начавшийся развиваться в системе импульсный процесс начинается вблизи начала такого интервала.
Более удобным и гибким способом изменения шага по времени в зависимости от развития процесса является использование оценки локальной погрешности шага интегрирования, основанной на комбинации двух специально выбранных формул Рунге — Кутта [194]. Пусть даны две формулы Рунге — Кутта разных порядков точности р и s

i-1.
где Кг =/(t0, y0); Ki = /(to + «.At, y0 + At? Pi/KjAt);
;=i.

i-l.
где Kj =f (t0, y0y, К( =f (t0 + a. iAt, y0 + At’ZfiijKjAt), причем p > s, r>r.
i= i.
Будем полагать, что коэффициенты формул (3.64)—(3.65) таковы, что  то есть и ЯГ, = К, для i = 1, 2,…, г.
то есть и ЯГ, = К, для i = 1, 2,…, г.
Тогда для локальной погрешности менее точной формулы (3.65) получается выражение вида.
где q, = Р, -Pi для i = 1, 2,…, г и q, = Р; для i = r+ 1,…, г.
Величина Е называется «контрольным членом». Использование контрольного члена при оценке локальной погрешности позволяет выбрать новый шаг по времени вычисляя дополнительно только величины К, для i = г + 1,…, гв более точной формуле (3.64). Таким образом, данный способ существенно более экономичен, чем способ, основанный на методе Рунге.
В рамках рассматриваемой методики реализован следующий алгоритм выбора шага по времени. Наряду с классической схемой Рунге — Кутта четвертого порядка точности (р = 4) рассматривается формула Рунге — Кутта второго порядка точности (5 = 2).

где Щ — те же, что и в (3.63). Контрольный член для формул (3.63) и (3.66) носит название контрольного члена Егорова и имеет вид.

Отметим, что для любой схемы Рунге — Кутта главный член локальной погрешности метода с точностью до 0(ДР'+1) представляется в виде.

Принимая в качестве оценки р"+ величину контрольного члена Егорова Ек и задавая допустимую абсолютную погрешность вц, переменной ук, проверяем условие 
Если оно выполняется, то полагаем, что при данном шаге Atm+i метод не достигает требуемой точности и следует уменьшить шаг по времени, выбрав.

где, а определяется из условия выполнения равенства  или, подставляя в (3.67) контрольный член Ек,
или, подставляя в (3.67) контрольный член Ек,
Отсюда.

Если вместо (3.68) выполняется обратное неравенство.

то из формулы (3.69) получаем, а > 1, Ats > Atm+1.
Таким образом строится гибкий алгоритм выбора шага по времени, причем шаг по времени корректируется на каждом шаге расчета домножением на множитель, а > 1 или, а < 1.
На практике, применительно к контрольному члену Егорова, а рассчитывается по формуле.
Коэффициент 0,9 берется для того, чтобы в случае увеличения шага At (а > 1), уменьшить вероятность необходимости его уменьшения на следующем шаге. Расчет, а ведется на каждом шаге по времени. При этом СДУ решается с использованием формулы Рунге — Кутта четвертого порядка точности. При получении, а < 1 рассчитанное значение Ym + i отбрасывается и рассчитывается вновь с шагом Ate > aAtm+1. В качестве ск выбираются величины, задаваемые в соответствии с (3.63).