Алгоритм расчета системы двух связанных стержней
При расчете движения головных частей РСЗО по траектории стержень 1 соответствует оболочке ГЧ, а стержень 3 — ее кассете. Полагаем, что в текущий момент движения по траектории распределение по длине стержней ит, xwx, Fx задано, а также известно распределение ир в предшествующий момент времени, задаваемое накопленной к текущему моменту пластической деформацией. Расчет текущего… Читать ещё >
Алгоритм расчета системы двух связанных стержней (реферат, курсовая, диплом, контрольная)
Рассмотрим систему из двух стержней 1 и 3 с кусочно-постоянными сечениями и свойствами. Полагаем, что на стержне 1 есть выступ, в отверстие которого пропущен конец стержня 3. Стержни 1 и 3 могут быть стянуты гайкой 2. При этом стержень 1 сжимается, а стержень 2 растягивается. Система схематично изображена на рис. 5.11. Будем полагать, что х2 — координата начала координат на стержне 3 в системе координат, связанной со стержнем 1, где х,-, i = 1, 3 — Лагранжевы координаты, отсчитанные вдоль стержней слева направо. Левые края стержней 1 и 3 жестко закреплены на общем основании. Координата I — продольная декартова координата, отсчитываемая от левого края стержня 1.
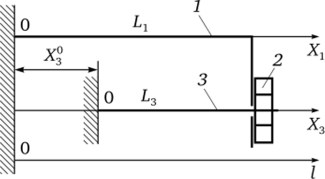
Рис. 5.11. Схема связки двух стержней:
- 1 — сжатый стержень; 2 — гайка; 3 — растянутый стержень
- 1-й этап. Расчет начального состояния
Пусть в начальный момент t = О, ДГ = 0, xwx = О, Fx = 0, то есть система покоится и равномерно прогрета. Предполагается, что при этом стержни 2 и 3 не деформированы, а гайка 2 завинчена без натяга до упора в выступ стержня 1. При этом стержень 2 имеет длину Lb а стержень 3 — длину L3 и выполняется равенство.

В дальнейшем осуществляется затяжка гайки 2 моментным ключом, при этом длина затянутой части стержня 3 в недеформированном состоянии уменьшается на ДL3 и конец стержня 3 получает удлинение и3 > О, а конец стержня 2 получает удлинение иг < 0. Приравнивая координаты I стыка деформированных стержней 2 и 3 получим равенство.

или, после сокращения в силу (5.142),.

Удлинение Uj стержня 2 рассчитывается решением задачи 1 с граничным условием на правом конце, задаваемым моментом затяжки гайки 2. В соответствии с [28].

где Fk — усилие, сжимающее стержень 2 и растягивающее стержень 3; п — число резьбовых соединений в стыке; Мк — момент затяжки гайки; d — диаметр резьбы в м.
Для стержня 3 необходимо одновременно определить AL3 и и3 для заданного на правом конце растягивающего напряжения.

Это достигается решением последовательности задач 1 для стержня 3 следующим образом. Введем функцию 
При AL3 = 0 решение задач 1 для стержней 1 и 3 с граничными условиями (5.145), (5.146) соответственно приводит к значениям и3 > О, и1 < 0, то есть F31 > 0. Далее в цикле по i = 1, 2, …, 9 выбирается АЬУ = ;-0,1 -13 и определяется промежуток ALg-15, ДЦ, такой, что Fl- -F3j < 0, то есть выделяется диапазон искомого значения AL3

Далее задача решается делением отрезка (5.148) пополам в сочетании с решением задач 1 для стержней 1 и 3 с граничными условиями (5.145), (5.146). При этом на шаге к выбирается та половина отрезка для AL3, для которой выполняется условие F3{1? F31 < 0. Критерием сходимости итераций служит условие.

Полученное в результате значение AL3 есть длина хода гайки 2 при ее затяжке.
2-й этап. Определение равновесного положения стержней в текущий момент движения по траектории
При расчете движения головных частей РСЗО по траектории стержень 1 соответствует оболочке ГЧ, а стержень 3 — ее кассете. Полагаем, что в текущий момент движения по траектории распределение по длине стержней ит, xwx, Fx задано, а также известно распределение ир в предшествующий момент времени, задаваемое накопленной к текущему моменту пластической деформацией. Расчет текущего напряженно-деформированного состояния проводится в следующем порядке.
Для стержней 1 и 3 решается задача 1 с нулевыми напряжениями на правых концах и определяются текущие длины стержней со свободными концами.

Возможны два случая. 1-й случай:

В этом случае между гайкой 2 и опорным кольцом оболочки (стержнем 1) образуется зазор

При этом рассчитанное напряженное состояние стержней реализуется и расчет заканчивается.
2-й случай:
В этом случае зазор 
и равновесное положение состыкованных стержней 2 и 3 получается за счет дополнительного растяжения стержня 3 на и3 > 0 и сжатия стержня I на uf > 0, причем.
Несостыкованные стержни в этом случае схематично изображены на рис. 5.12. Назовем левое положение стыка в зазоре положением 1, а правое — положением 2. Будем определять равновесное положение стыка в зазоре по величинам сил взаимодействия стержней Flx, F3x, то есть разыскивая такое перемещение конца стержня 3, при котором силы взаимодействия в стыке равны по модулю, то есть F^ + F3x = 0.
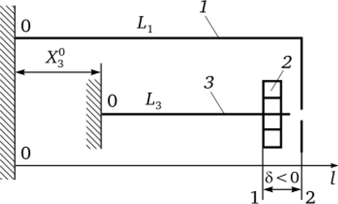
Рис. 5.12. Несостыкованные стержни в случае отсутствия зазора в состыкованной системе
Очевидно, что.

Делаем это, сочетая деление отрезка (5.152) пополам с решением задачи 3 для стержней 1 и 3, то есть попутно определяя возможное приращение пластической деформации. Первые два шага алгоритма уже сделаны при расчете состояний свободных на правом конце стержней.
Действительно, при положении стыка в сечении 1 (см. рис. 5.11).

При положении стыка в сечении 2.

Так что интервал (5.152) действительно выделяет равновесное положение стержней.
Дальнейшее изложение проводим в предположении, что пластически деформироваться может только стержень 3, точнее — шейка (утонение) шпильки или болта узла фиксации. При этом в процессе решения задачи 3 для стержня 3 в положении 2 рассчитывается величина и3 — перемещение правого конца стержня 3, с которого начинается пластическая деформация стержня 3, при которой значение F?jX сохраняет постоянное значение F%x.
Если оказывается, что > и3- 8, то равновесное положение стыка стержней будет достигаться без их дополнительной пластической деформации за счет упругой деформации. При этом задача завершается выполнением следующего алгоритма.
Алгоритм 1. Решается задача 3 для стержня 3 с перемещением U3 = 0,5 (и3] + и32), и задача 3 для стержня 1 с соответствующим в силу (5.144) перемещением uj = uf — AL3. При этом определяется сумма.
Flx + F3x-
Если выполняется критерий сходимости  то расчет заканчивается. При этом необходимо.
то расчет заканчивается. При этом необходимо.

В противном случае расчет повторяется.
При этом, если F^ + F3x < 0, то полагается и31 = 0,5(u31 + и32), а при Fix + F3x > 0 полагается u32 = 0,5(u31 + и32).
На этом алгоритм 1 заканчивается.
Если оказывается, что u3 < и3 — б, то равновесное положение стыка стержней может достигаться как без их дополнительной пластической деформации, так и при ее наличии. Для выяснения этого обстоятельства рассматривается сжатие свободного стержня 2 усилием F%x = -F$x, то есть решается задача 1 для стержня 2 с соответствующим напряжением на срезе, и определяется uf — перемещение правого конца стержня 2, соответствующее сжимающему усилию F^x.
Если конец стержня 2 оказался левее положения конца стержня 3 с перемещением и3, то равновесное положение стыка стержней будет находиться в области упругой деформации стержня 3 между сечениями li = Li + и[ и l2 = Х3 + L3 — Д13 + и3, где Д < 12. В этом случае равновесное положение стыка определяется переходом к алгоритму 1 с заданием u31 = u[ + AL3, u32 = u3.
Если конец стержня 2 оказался правее положения конца стержня 3 с перемещением и3, то равновесное положение стыка стержней будет находиться в области пластической деформации стержня 3 и для завершения расчета необходимо решить задачу 3 для стержня 3 с перемещением конца.
