Метод широтно-импульсного регулирования напряжения двигателя постоянного тока
Последнее особенно выгодно, так как динамические свойства привода при этом улучшаются. Если среднее значение тока якоря уменьшается, то относительная величина пульсаций возрастает и может наступить такой момент, когда ток во время паузы будет снижаться до нуля. В этом случае наступает режим прерывистых токов. Период коммутации не связан с частотой сети и зависти от динамических свойств силовых… Читать ещё >
Метод широтно-импульсного регулирования напряжения двигателя постоянного тока (реферат, курсовая, диплом, контрольная)
На рис. 13.25, а представлена схема электропривода с широтноимпульсным регулированием напряжения на якоре ДПТ. Схема включает ДПТ с возбуждением от постоянного магнита, якорь которого подключен через транзистор VT к выходу неуправляемого выпрямителя UZ. База транзистора VT подключена к широтно-импульсному модулятору ШИМ, который методом сравнения опорного пилообразного напряжения Uon и напряжения уравнения Uy формирует импульсы управления транзистором VT (рис. 13.25, б). В результате транзисторный ключ VT периодически подключает якорь ДПТ к источнику нерегулируемого напряжения Ud. При этом в рабочую часть периода ключ VT замкнут, и электрическая энергия потребляется из сети и превращается ДПТ в полезную механическую работу ИО. Часть энергии при этом запасается в виде электромагнитной в индуктивности якоря ДПТ. Во время паузы t2 ключ разомкнут, но цепь якоря замыкается через диод VD, и ДПТ продолжает работать за счет запасенной энергии. Преобразователь напряжения сети в переменное выпрямленное напряжение на зажимах якоря ДПТ, представленный на рис. 13.25, а, называется нереверсивным широтно-импульсным преобразователем (ШИП).
Из графиков напряжения на рис. 13.25, б следует, что среднее напряжение за период коммутации.

где — длительность импульса напряжения; Тк — период коммутации;
?i.
у— —скважность импульсов.
?*к Очевидно, что при изменении у среднее напряжение на якоре ДПТ будет изменяться. Изменить величину у можно несколькими методами. В ШИП для этого изменяют длительность импульса t} при неизменном периоде коммутации Тк.
Длительность импульса t1 и скважность у импульсов определяется уровнем напряжения Uy (см. рис. 13.25).
Период коммутации не связан с частотой сети и зависти от динамических свойств силовых транзисторных ключей. В ШИП частота коммутации транзистора VT /к = —составляет несколько килогерц и определи ляется задающим генератором опорного пилообразного напряжения.
Опорное напряжение генератора поп сравнивается с управляющим напряжением иу (см. рис. 13.25, б).
В момент равенства этих напряжений вырабатывается импульс, переключающий транзисторный ключ VT.
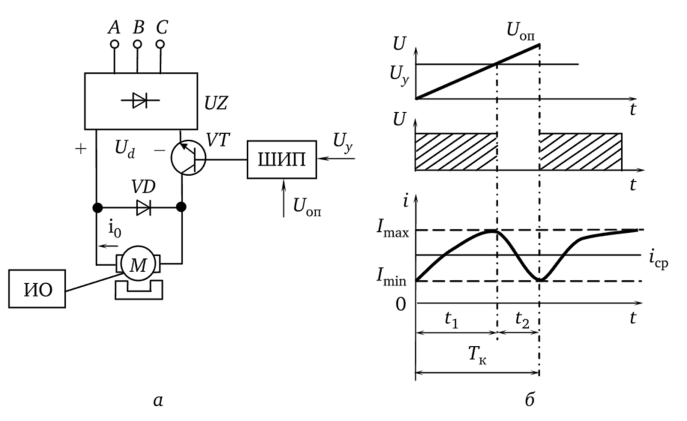
Рис. 13.25. Схема (а) и графики напряжения и тока (б) импульсного преобразователя напряжения якоря ДПТ Если внутреннее сопротивление источника постоянного напряжения мало и напряжение Ud не зависит от нагрузки (идеальный источник напряжения), то внешние характеристики ШИП практически горизонтальны, а жесткость механических (рис. 13.26) характеристик системы ШИП — ДПТ определяется только сопротивлением якоря ДПТ.
Это обстоятельство выгодно отличает импульсные методы от других методов регулирования скорости ДПТ. Зависимость частоты вращения ДПТ, питаемого от ШИП, от тока якоря может быть записана в виде.

где со0 — скорость идеального холостого хода; /ср — среднее значение тока якоря; IK=Ud/RR.
Импульсное регулирование напряжения сопровождается пульсациями тока якоря, которые оказывают отрицательное воздействие на работу привода.
Величина пульсаций тока (см. рис. 13.25, б).

Коэффициент К в нереверсивных ШИП равен единице. Для реверсивных преобразователей К зависит от способа коммутации силовых ключей и может принимать значения 1 и 0,5.
Для уменьшения пульсаций тока следует увеличивать электромагнитную постоянную времени цепи якоря и частоту коммутации.
Последнее особенно выгодно, так как динамические свойства привода при этом улучшаются. Если среднее значение тока якоря уменьшается, то относительная величина пульсаций возрастает и может наступить такой момент, когда ток во время паузы будет снижаться до нуля. В этом случае наступает режим прерывистых токов.
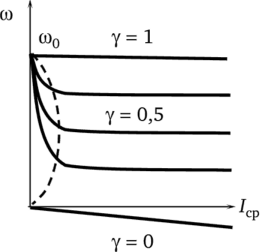
Рис. 13.26. Зависимости со (7ср) привода с ШИП Граничное значение тока для режима прерывистых токов определяется по формуле.

где Тя — постоянная цепи якоря ДПТ.
Наибольшая протяженность режима прерывистых токов наступает при у = 0,5. При у = 0 и у = 1 возможен только режим непрерывного тока. Режим прерывистых токов увеличивает наклон характеристики со (7ср), которая на этом участке приближенно описывается уравнением вида.

При 7ср —" 0 изменение у не изменяет скорости идеального холостого хода. Это обстоятельство определяет внешний вид характеристик со (7ср), которые в области прерывистых токов все исходят из точки со = со0, рис. 13.26.
Реверсивный ШИП (рис. 13.27, а) выполняют по мостовой схеме, состоящей из транзисторных ключей VT1…VT4, шунтированных обратными диодами VD1…VD4.
Существует два режима работы реверсивного преобразователя: симметричный и несимметричный. При симметричном режиме транзисторные ключи в течение периода коммутации переключаются попарно. В период работают ключи VT1 и VT2, а в период t2 — VT3 и VT4. При этом на якоре ДПТ возникают разнополярные импульсы напряжения (рис. 13.39, б).
Из формулы (13.67) следует, что Ucp > 0 при у = 0,5 -s- 1,0 и меняет знак при у < 0,5 Ucр равно нулю при у = 0,5.
При симметричном управлении в приводе не возникает режим прерывистых токов и механические характеристики линейны при всех нагрузках.
Среднее значение напряжения на якоре в этом случае:

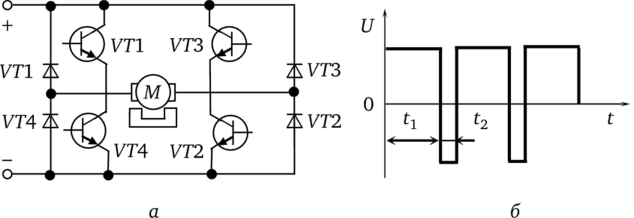
Рис. 13.27. Схема (а) и графики напряжения при симметричном (б) и несимметричном (в) режиме работы реверсивного ШИП Коэффициент К в (13.64) составляет 0,5.
При несимметричном режиме коммутируются транзисторные ключи VT1 и VT2. Вторую пару ключей VT3 и VT4 используют при изменении направления вращения. Этот режим обеспечивает на якоре однополярные импульсы напряжения (рис. 13.27, в). Пульсация тока якоря при несимметричном режиме вдвое меньше, чем при симметричном, коэффициент К равен единице.
Электромеханические и механические характеристики ЭП, выполненного по схеме ШИП — ДПТ, при симметричном и несимметричном режимах управления ключами мостовой схемы представлены на рис. 13.28.