Структурная схема проигрывателя компакт-дисков
В режиме управления с помощью широтномодулированного сигнала разгон двигателя осуществляется широтномодулированным сигналом ШИП (PWM) поступающим к нему на вход 1, рис. 15.7. После разгона двигатель будет работать с постоянной частотой вращения определяемой скважностью сигнала импульсов. Торможение двигателя осуществляется широтномодулированным сигналом ШИП (PWM), поступающим к нему на вход 2… Читать ещё >
Структурная схема проигрывателя компакт-дисков (реферат, курсовая, диплом, контрольная)
Упрощенная структурная схема проигрывателя компакт-дисков, CDпроигрывателя (Compact Disc Player — CDP) представлена на рис. 15.8.
Управление скоростью двигателя вращения диска осуществляется интегрированной, полностью цифровой сервосистемой.
С помощью сервосистемы обеспечиваются следующие режимы управления двигателем вращения диска:
- — управление скважностью импульсов: требуется двухпроводная линия (сопряженные выходные сигналы); частота управляющих импульсов (1 х п) МГц, далее п — любое целое число;
- — управление с помощью широтномодулированного ШИП (PWM) выходного сигнала при двухпроводной подаче сигналов управления; частота модуляции — (22,05 х п) кГц;
- — управление с помощью широтномодулированного ШИП (PWM) выходного сигнала при четырехпроводной передаче сигналов управления; частота модуляции (22,05 х п) кГц;
- — режим управления CDV.
Режим управления скважностью импульсов входного сигнала.
В режиме управления скважностью импульсов на вход 1, рис. 15.6, а, на двигатель поступает модулированный скважностью импульсов сигнал управляющего воздействия, формируемый по методу симметричного режима (раздел 13.4.6, рис. 13.27, б). Существуют следующие соотношения между положительной и отрицательной составляющими сигнала. Нейтральному режиму вращения двигателя соответствует коэффициент скважности равный 0,5. При увеличении коэффициента скважности от 0,5 до 1 наступает режим ускорения двигателя, а при уменьшении от 0,5 до 0 — режим торможения. Кроме того, в данном способе управления двигателем вращения диска сигнал на входе 2 представляет собой инверсию сигнала на входе 1. Оба сигнала изменяют свое состояние только по перепадам внутренней тактовой частоты (1 х п) МГц. На рис. 15.6, а, показана схема возможной реализации вышеописанного метода.
На практике применяется балансная схема управления двигателем, рис. 15.6, б. На вход схемы подается напряжение Увх, которое усиленное через усилители прикладывается к якорю двигателя с разными знаками. С изменением величины скважности Увх изменяется и напряжение якоря двигателя по линейному закону, а значит, и частота вращения двигателя диска. Изменяя полярность Увх, изменяется знак напряжения якоря U, а значит, и направление частоты вращения двигателя (диска).
Режим управления двигателем с помощью широтномодулированного ШИП (PWM) входного сигнала (двухпроводной вариант)
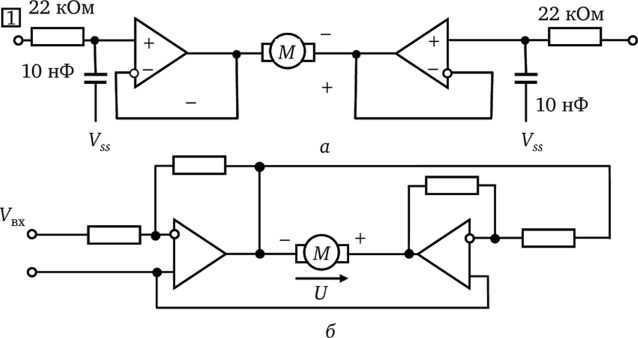
Рис. 15.6. Схемы реализации метода управления двигателя вращения диска с помощью изменения скважности импульсов.
В режиме управления с помощью широтномодулированного сигнала разгон двигателя осуществляется широтномодулированным сигналом ШИП (PWM) поступающим к нему на вход 1, рис. 15.7. После разгона двигатель будет работать с постоянной частотой вращения определяемой скважностью сигнала импульсов. Торможение двигателя осуществляется широтномодулированным сигналом ШИП (PWM), поступающим к нему на вход 2. При этом изменяется полярность напряжения на якоре двигателя. Временные диаграммы работы данного способа управления, приведены на рис. 15.8. Как следует из диаграмм, в данном случае, имеем несимметричный режим работы ШИП (раздел 13.4.6, рис. 13.27, в).
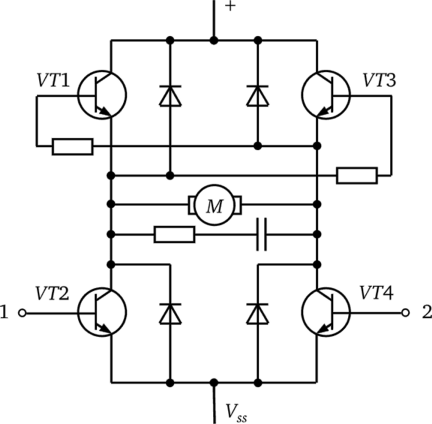
Рис. 15.7. Схема метода управления двигателем вращения диска с помощью широтномодулированного сигнала (двухпроводной вариант).
При переходе из режима разгона в режим торможения необходима пауза не менее 240 мкс.
Режим управления двигателем с помощью широтномодулированного ШИП (PWM) выходного сигнала (четырехпроводной вариант). В данном способе управления применена мостовая схема (рис. 13.27, а) управления приводом двигателя вращения диска, с четырьмя входами, рис. 15.9. Временные диаграммы сигналов при таком варианте построения схемы управления показаны на рис. 15.10. Как следует из диаграмм, в данном случае применен несимметричный режим работы ШИП. Входы VI, V3 используются для управления режимом работы двигателя.
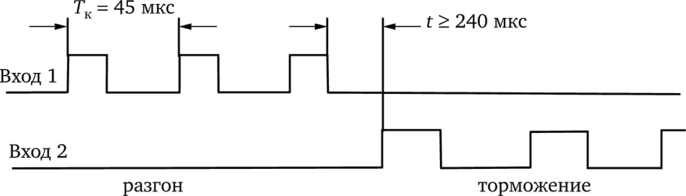
Рис. 15.8. Временные диаграммы метода управления двигателем вращения диска с широтномодулированным сигналами (двухпроводной.
вариант).
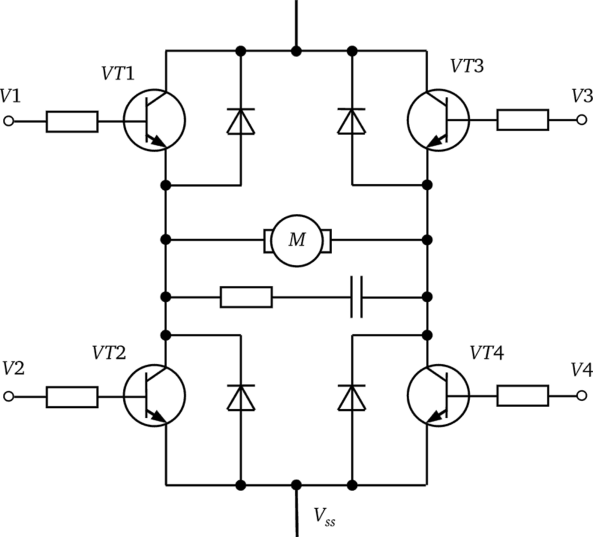
Рис. 15.9. Схема метода управления двигателем вращения диска широтномодулированным сигналом ШИП (PWM) при мостовой (четырехпроводной) конфигурации.

Рис. 15.10. Временные диаграммы метода управления двигателем вращения диска широтномодулированным сигналом ШИП (PWM) в четырехпроводном (мостовом) варианте.
Регулирование частоты вращения диска в режиме «воспроизведение»
Чтобы обеспечить при воспроизведении постоянную скорость поступления информации, равную 4,3218 Мбит/с, в такт обработки, угловая скорость вращения компакт-диска должна быть переменной, поскольку длина витка спирали, по которой проходит лазерный луч, увеличивается по мере перемещения от внутренней дорожки к внешней.
Возможно использование разных алгоритмов подстройки скорости вращения диска. Наибольшее распространение получили цифровые схемы на основе системы фазовой автоподстройки частоты, а также схемы, использующие буферную память оперативно запоминающего устройства ОЗУ. В первом случае с помощью фазового детектора производится сравнение высокостабильной эталонной последовательности импульсов частотой, получаемых от кварцевого генератора через делитель частоты 1, Ебл =75Гц (частота блоков) с последовательностью блоковых импульсов F^, считанных с компакт-диска (рис. 15.11). В считанном, оптическим адаптером сигнале схема выделения синхронных импульсов их идентифицирует и через делитель частоты 2 передает в фазовый детектор. При рассогласовании по частоте того или иного знака фазовый детектор формирует сигнал ошибки (рассогласования), управляющий скоростью вращения электродвигателя привода диска.
Во втором случае анализируется количество поступающей в некоторый буфер ОЗУ цифровой информации в определенный промежуток времени. Если в процессе воспроизведения заполнение буфера данных ОЗУ не соответствует эталонному, схема контроля вырабатывает сигнал рассогласования, управляющий скоростью вращения электродвигателя привода диска. В схеме управления электродвигателем компактдиска вводятся управляющие сигналы начала (ускорения) и окончания (торможения) воспроизведения.
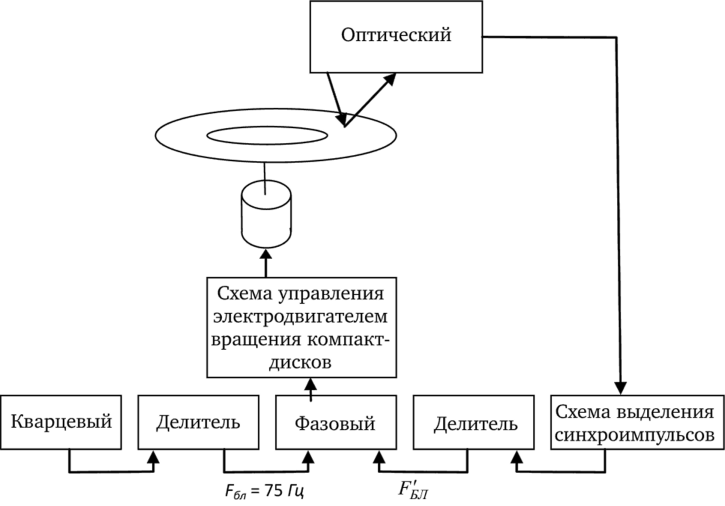
Рис. 15.11. Схема управления скоростью вращения компакт-диска.