Переходный процесс динамического торможения двигателя постоянного тока
В мостовом выходном каскаде (рис. 13.29), в диагональ которого включен двигатель постоянного тока, режим динамического торможения реализуется при подаче на вход схемы управления сочетания сигналов F = 1;R = 1. Схема включения ДПТ в этом режиме представлена на рис. 15.4, а. Время tnn определяется отрезком 0 — в. Точка в получается в результате пересечения горизонтали из точки с, при частоте сос… Читать ещё >
Переходный процесс динамического торможения двигателя постоянного тока (реферат, курсовая, диплом, контрольная)
В мостовом выходном каскаде (рис. 13.29), в диагональ которого включен двигатель постоянного тока, режим динамического торможения реализуется при подаче на вход схемы управления сочетания сигналов F = 1;R = 1. Схема включения ДПТ в этом режиме представлена на рис. 15.4, а.
На рис. 15.4, б представлены механические характеристики ЭП: I — в двигательном режиме; II — в режиме динамического торможения. При переключении ДПТ из двигательного режима (точка 1) в режим динамического торможения в первый момент режим работы ДПТ соответствует точке 2 характеристики И. Это обусловлено тем, что электронное переключение механических характеристик происходит практически мгновенно, и поэтому в силу механической инерции вала ДПТ и ИО рабочая частота вала ДПТ практически не изменится и будет равна: =со2.
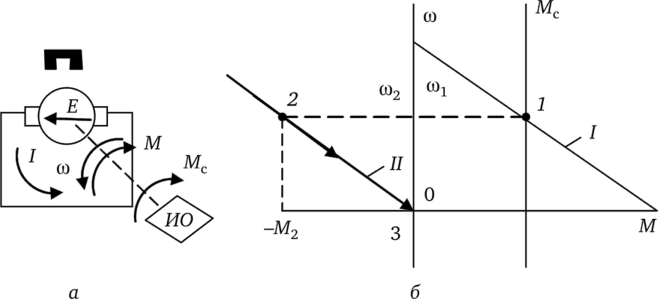
Рис. 15.4. Режим динамического торможения ДПТ: а — схема включения; б — механические характеристики Уравнение механического движения ЭП будет иметь вид.

В уравнении (15.10) момент двигателя взят со знаком «-», так как при переходе из двигательного режима в режим динамического торможения знак момента изменяется, и он является тормозным. Согласно уравнению (15.10) под действием тормозного момента ДПТ и момента сопротивления ускорение вала ДПТ будет отрицательным и частота вращения вала ДПТ и ИО будет уменьшаться по характеристике II до со3 = 0 (точка 3). Это соответствует реактивному характеру момента сопротивления, характерному для магнитофона и другой бытовой радиоэлектронной аппаратуры.
В уравнение (15.10) подставим уравнение момента двигателя в режиме динамического торможения, полученное из (12.82).

где R — сопротивление якоря двигателя, включая сопротивление добавочного резистора.
Получим.

Принимаем момент сопротивления равным нулю, Мс =0, из (15.12) имеем.

RJ — огг.
где-— = Гм — электромеханическая постоянная времени ЭП.
(кФ) Уравнение (15.13) будет иметь вид.

Это однородное дифференциальное уравнение первого порядка относительно частоты со. Его характеристическое уравнение.

и корень характеристического уравнения.

Так как корень один и отрицательный, то ищем частоту в форме.

В уравнении (15.17) неизвестна постоянная интегрирования А. Для её нахождения используются начальные условия: при t = 0, частота равна сонач. Подставив начальные условия в уравнение (15.17) получим.

В окончательном виде уравнение переходного процесса для частоты будет иметь вид.

Подставив (15.19) в уравнение (15.11), получаем.

По уравнениям (15.19) и (15.20) построим графики переходного процесса в ЭП с ДПТ в режиме динамического торможения, рис. 15.5.
Из рис. 15.5 следует, что с увеличением времени t частота и момент двигателя уменьшаются от начальных значений (сонач,-М2)по экспоненте. Постоянную Тм можно определить, если из точки сонач провести касательную к кривой co (t) до пересечения ее с осью времени. Отрезок 0 — а в масштабе времени будет равен электромеханической постоянной ЭП.
В процессе торможения ДПТ в контуре цепи якоря, рис. 15.9.а, будет протекать затухающий по экспоненте ток якоря I. Кинетическая энергия вращающего якоря ДПТ и ИО в процессе торможения превращается в электрическую (ДПТ работает в режиме генератора), которая в свою очередь превращается в тепло в сопротивлении якоря ДПТ. Уравнение энергетического баланса будет иметь вид.

где tnn — время переходного процесса.
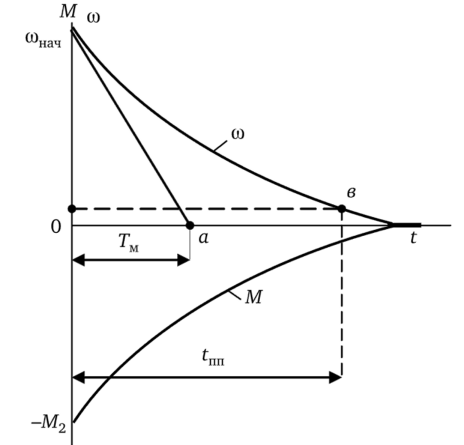
Рис. 15.5. Переходный процесс торможения ДПТ.
Время tnn определяется отрезком 0 — в. Точка в получается в результате пересечения горизонтали из точки с, при частоте сос =0,05сонач, с кривой co (t). Т. е. за время ?пп значение частоты изменяется от сонач до 0,05сонач (5% от Юнач).
Время переходного процесса в этом случае равно ?пп = 3Тм.