Основные подсистемы противоаварийного автоматического управления электроэнергетическими системами
Рассмотрим в упрощенном представлении порядок работы ЦС АПНУ. Прежде всего отметим, что для каждой возможной аварийной ситуации ставится в соответствие «свой» ПО, т. е. перечень возможных возмущающих воздействий заранее намечается. Охватывают большие районы с размещением всех элементов на разных объектах. Контролируют схему и режим всего района, вырабатывают УВ и передают команды для… Читать ещё >
Основные подсистемы противоаварийного автоматического управления электроэнергетическими системами (реферат, курсовая, диплом, контрольная)
Автоматическое предотвращение нарушений устойчивости
Комплекс устройств АПНУ предназначен для предотвращения нарушения ДУ при аварийных возмущениях и обеспечения нормативного запаса СУ в ПАР.
Устройства АПНУ должны выполнять свои функции для всех сочетаний схем, режимов и аварийных возмущений.
В общем случае особенностью АПНУ являются три фазы ее функционирования:
- а) ПАУ для сохранения ДУ в аварийном режиме;
- б) ПАУ для обеспечения устойчивости перехода к ПАР;
- в) ПАУ для сохранения статической устойчивости в ПАР.
Однако при эффективном управлении в аварийном и послеаварийном режимах, как правило, обеспечивается и устойчивость перехода от аварийного режима к ПАР. Поэтому на практике в АПНУ реализуются лишь первая и третья фазы ПАУ, т. е. ПАУ ДУ и ПАУ СУ.
Еще одной важнейшей особенностью функционирования АПНУ является практическая бесчисленность ВВ в ЭЭС и соответственно многовариантность необходимых УВ.
В связи с указанными обстоятельствами комплекс АПНУ является наиболее сложным из всех комплексов ПАА. Он обычно включает в себя следующие устройства (структурная схема ЦС АПНУ рассматривалась ранее):
- — измерительные органы (ИО) или датчики информации (ДО);
- — пусковые органы (ПО) или пусковые устройства (ПУ) (для простейших схем АПНУ — пускодозирующие устройства (ПДУ));
- — устройства дозировки воздействий (УДВ) или (АДВ);
- — устройства запоминания дозировок (УЗД) или (АЗД);
- — устройства передачи аварийных сигналов и команд (УПАСК) или (ТСА);
- — исполнительные устройства (ИУ).
ИО дают информацию о доаварийной схеме и режиме ЭЭС для оценки напряженности исходного режима, что используется для определения необходимых УВ.
ПО или фиксируют непосредственно аварийные возмущения, или реагируют на изменение режимных параметров, вызванных этим возмущением.
Чаще всего используются:
- — фиксация возмущения: ФОЛ по положению выключателей; фиксация отключения элемента по сбросу мощности (реле мощности); фиксация тяжести КЗ (сброс мощности и длительности КЗ);
- — фиксация аварийной перегрузки: по факту увеличения передаваемой активной мощности; по факту увеличения тока по передаче; по факту увеличения угла по передаче.
Сработавший ПО выбирает требуемое УВ из состава запомненных УЗД (АЗД).
В АПНУ используются практически все УВ, которые должны обеспечивать:
- а) для управления СУ:
- — разгрузку контролируемого сечения (ДРТ, ОГ, ОН, ДС);
- — увеличение пропускной способности сечения (ФВ, ФК, ОШР);
- б) для управления ДУ:
- — устранение избытка и дефицита активной мощности на валах генераторов (ФВ, ИРТ, ОГ, ОН, ЗТ);
- — гашение избыточной кинетической энергии генераторов, накопленной при ускорении (ИРТ, ФВ, ЭТ).
Устройства АДВ являются самыми сложными устройствами АПНУ. Они рассчитывают для всех возмущений (для всех ПО) необходимые УВ и посылают их для запоминания в устройства АЗД.
Нередко в АПНУ используются схемы фиксации мощности в режиме, предшествующем аварии.
Указанное устройство (КПР — контроль предшествующего режима) является дополнительным устройством для ввода автоматики в действие при определенном значении мощности по передаче.
Фиксация мощности ЭП производится с помощью специального органа фиксации, выполненного на основе реле активной мощности.
В простых системах АПНУ устройства КПР выступают в роли АДВ: при срабатывании они сразу подают сигнал на реализацию заготовленных заранее УВ (каждому устройству КПР — свое УВ).
Первые устройства АДВ выполнены на базе аналогорелейных преобразователей, состоящих из максимальных реле активной мощности, реле времени, промежуточных реле и коммутаторов.
Возможности подобных устройств АДВ ограничены, поэтому в последнее время все шире применяются ЭВМ для решения функций АДВ.
Устройства передачи аварийных сигналов и команд. Схема УПАСК состоит из передатчика, приемника и канала связи. В качестве высокочастотного (ВЧ) канала связи используют провод ВЛ, трос ВЛ (иногда кабель).
Все устройства АПНУ могут быть разделены на следующие группы:
Локальные (однофункциональные устройства ПА). | Реагируют на местные признаки опасных изменений схемы и режима; реализуют УВ в пределах одного объекта. |
Децентрализованные комплексы. | Состоят из ряда устройств. УВ дозируются в нескольких пунктах, где проявляются нарушения, на основе местной информации. УВ могут реализовываться на объектах, удаленных от мест установки ПО, передаются с помощью средств телеуправления. |
Централизованные комплексы. | Охватывают большие районы с размещением всех элементов на разных объектах. Контролируют схему и режим всего района, вырабатывают УВ и передают команды для их исполнения (вся информация собирается в одном центральном устройстве). |
Рассмотрим в упрощенном представлении порядок работы ЦС АПНУ. Прежде всего отметим, что для каждой возможной аварийной ситуации ставится в соответствие «свой» ПО, т. е. перечень возможных возмущающих воздействий заранее намечается.
В устройстве АДВ непрерывно в циклическом режиме определяются необходимые УВ для всех намеченных аварийных нарушений (для всех ПО).
В соответствии с этими УВ после каждого цикла расчетов подготавливаются цепи (в АДВ или АЗД), которые связывают все ПУ и все ИУ (рис. 3.1), т. е. осуществляется настройка АЗД. По существу настройка АЗД на выбранные УВ заключается в выборе точек соединения горизонтальных и вертикальных шинок соединения шинного коммутатора.
При аварийном нарушении срабатывает соответствующий ПО, который замыкает свой контакт, например ПО-1. Тяжесть исходного режима контролируется КПР: при достижении передаваемой по контролируемой линии мощности уставки, например КПР-1, замыкается соответствующий контакт. В результате образуется цепочка в АЗД, по которой передается сигнал на реализацию заготовленного УВ. В рассматриваемом примере это УВ реализуется ИУ-2.
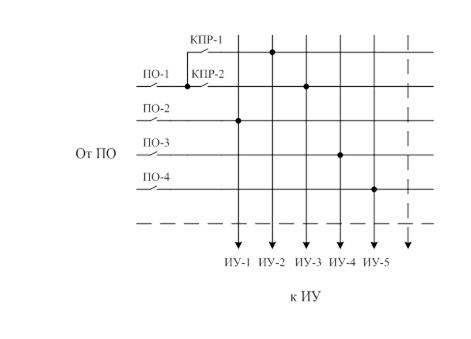
Рис. 3.1 Шинный коммутатор АЗД
Следует обратить внимание на то, что запуск автоматики осуществляется только при замыкании обоих контактов в цепи.
В подсистему АПНУ входят следующие устройства автоматики разгрузки (это в основном локальные комплексы).
Для управления ДУ:
АРБКЗ — автоматика разгрузки при близких КЗ;
АРЗКЗ — автоматика разгрузки при затяжном КЗ.
Для управления СУ:
АРОЛ — автоматика разгрузки при отключении ЛЭП;
АРОДЛ — автоматика разгрузки при отключении двух ЛЭП;
АРОТ — автоматика разгрузки при отключении трансформатора;
АРПМ — автоматика разгрузки при фиксации перегрузки по мощности элементов сети;
АРПФУ — автоматика разгрузки при фиксации перегрузки ЭП по значению фазового угла;
АРОГ — автоматика разгрузки при отключении генератора.
Для иллюстрации приводится краткая характеристика одной из перечисленных автоматик — АРБКЗ. АРБКЗ устанавливается обычно на крупных ЭС и осуществляет их разгрузку для сохранения ДУ при близком КЗ независимо от места повреждения.
Обычно используется КРТ через электрогидравлический преобразователь (ЭГП) и лишь при отсутствии такой возможности используется ОГ.
В состав АРБКЗ входят:
- — ПУ, фиксирует КЗ по возникновению несимметрии токов по фазам (по току обратной последовательности);
- — ПДУ, фиксирует снижение напряжения (УФСН) или снижение напряжения прямой последовательности (УФСНП);
Иногда дополнительно к УФСН устанавливаются устройства:
- — фиксации сброса активной мощности (УФСМ);
- — устройства контроля предшествующего режима по активной мощности (УКПР), фиксирующие степень тяжести предшествующего режима. КПР определяет, какое УВ должно исполняться из числа заранее заготовленных.