Анализ кинематической схемы, определение параметров и проектирование расчетной схемы механической части электропривода
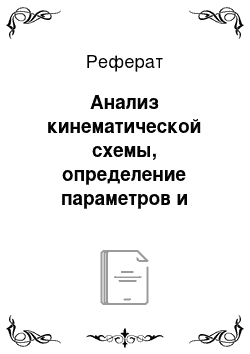
Рисунок 1.3. Кинематическая схема механизма: ЭД — электродвигатель; ПМ — передаточный механизм; М — муфта; ИМ — исполнительный механизм Механическая часть электропривода состоит из двигателя, передаточного устройства и исполнительного механизма. Главное движение производится от двигателя, вращательное движение от которого передается через одноступенчатый редуктор на реечную шестерню, которая… Читать ещё >
Анализ кинематической схемы, определение параметров и проектирование расчетной схемы механической части электропривода (реферат, курсовая, диплом, контрольная)
Главное движение производится от двигателя, вращательное движение от которого передается через одноступенчатый редуктор на реечную шестерню, которая с помощью зубчатой рейки осуществляет поступательное движение стола.
Обобщенная кинематическая схема механизма главного движения представлена на рисунке 1.3.
Рисунок 1.3. Кинематическая схема механизма: ЭД — электродвигатель; ПМ — передаточный механизм; М — муфта; ИМ — исполнительный механизм Механическая часть электропривода состоит из двигателя, передаточного устройства и исполнительного механизма.
Для данного механизма рассчитаем суммарный момент, приведенный к валу двигателя.
Процесс перехода к расчетным схемам обычно называют приведение, а величины называются приведенными.
Данная механическая схема представляет собой систему связанных масс, движущихся с различными скоростями. Механические связи в такой системе можно принять абсолютно жесткими, исходя из чего механическую схему механизма можно представить в виде одномассовой модели, рисунке 1.4.
Суммарный приведенный к валу двигателя момент инерции электропривода определяем как:
J? = Jд + Jмуф + m2, (1,1).
где — коэффициент, учитывающий момент инерции вращающихся частей передаточного механизма (= 1,1−1,3);
Jмуф — момент инерции муфты, Jмуф = 0.2 Jд;
Jд — момент инерции ротора двигателя;
m — масса поступательно движущихся частей механизма;
— радиус приведения.
Рисунок 1.4. Механическая модель электропривода.
J = 1.1· 4.5 + 0.24.5 + 51030.01252 = 6.63 кгм2.
Определение путей повышения эффективности установки на основе модернизации системы электропривода, автоматизация установки, введения технологических обратных связей
В данном курсовом проекте предлагается замена постоянного электропривода на переменный электропривод, а именно на ПЧ АД.
ПЧ АД по сравнению с постоянным электроприводом имеет следующее достоинства:
- — двигатель, применяемый в ПЧ АД дешевле по цене, прост в конструкции и обслуживании чем двигатель постоянного тока,
- — КПД у асинхронного двигателя выше чем у электродвигателя постоянного тока,
- — масса габариты асинхронного электропривода меньше в 1.2ч1.5 раза чем у электропривода постоянного тока одной и той же мощности.
Следовательно, из выше сказанного, при внедрении асинхронного электропривода вместо постоянного тока позволит нам уменьшить масса габариты установки, уменьшатся потери энергии на двигателе, будет более дешевле в обслуживании, а значит замена постоянного электропривода на асинхронный оправдано исходя из экономических соображений.