Кинематический анализ механизма
Через точку плана скоростей проводим перпендикулярно звену линию действия скорости, а через полюс линию действия скорости. Точка пересечения этих направлений определяет конец вектора скорости точки D. Анализ рычажных механизмов: учебно-методическое пособие / Т. В. Цветкова, М. Ю. Кабакова. — Архангельск: Изд-во ФГАОУ ВПО «Северный (Арктический) федеральный университет имени М.В. Ломоносова… Читать ещё >
Кинематический анализ механизма (реферат, курсовая, диплом, контрольная)
Задача 1.
Определить скорости и ускорения всех подвижных шарнирных точек шестизвенного рычажного механизма, а также величины и направления угловых скоростей и ускорений звеньев в заданном положении входного звена 01А, построив план скоростей и план ускорений.
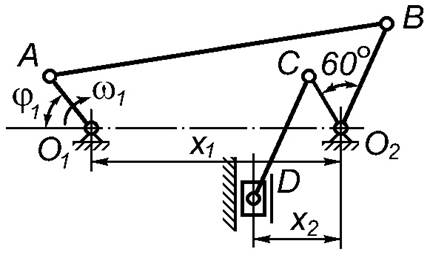
Рисунок 1 — Схема рычажного механизма Дано:; ;; ;; ;; ;



Решение: скорость кинематический передаточный.
1.1 Построение кинематической схемы в заданном положении
Схему чертим в масштабе М 1:2, тогда масштабный множитель равен.





Определяем отрезки для построения длин звеньев на чертеже. Построение плана начинаем нанесения элементов неподвижных звеньев. Для этого штрихпунктирной линией наносим линию центров и на ней наносим точки. На расстоянии от точки перпендикулярно линии проводим траекторию движения точки D.


Под углом к линии через точку проводим ось кривошипа и от этой точки откладываем на ней. Получаем изображение входного звена (кривошипа) в заданном положении.
Положение точки B получаем методом засечек. Для этого проводим дуги: из точки, А радиусом АВ и из точки радиусом. Точка их пересечения будет точкой В.


Под углом к звену проводим ось звена и на этой линии откладываем отрезок .

Сделав радиусом из точки С засечку на траектории движения точки D, определяем положение этой точки на схеме.
- 1.2 Определение скоростей точек механизма
- 1.2.1 Определяем угловую скорость кривошипа

1.2.2 Определяем скорость точки кривошипа.



Вектор направлен перпендикулярно оси звена в сторону его вращения.
1.2.3 Масштаб плана скоростей
Принимаем отрезок, который будет изображать на плане скорость точки A кривошипа .

Из произвольной точки на чертеже, принятой за полюс плана скоростей, откладываем отрезок перпендикулярный к. Тогда.

1.2.4 Определение скорости точки.

Для определения скорости точки используем векторные уравнения.


Скорость точки известна; величина относительной скорости точки B при вращении вокруг точки неизвестна, но известна линия действия — перпендикулярна звену .

Скорость, так как точка принадлежит неподвижному звену (стойке). Величина скорости неизвестна, но известна линия действия — перпендикулярна.





Для определения скорости точки B через точку (конец вектора скорости) проводим перпендикулярно звену АВ линию действия скорости, а через полюс плана скоростей перпендикулярно звену линию действия скорости. На пересечении этих двух прямых получаем точку конец вектора скорости точки B. Направление скорости определяется направлением вектора .


1.2.5 Определение скорости точки.

Положение точки С (конец вектора точки С) определяем на плане скоростей по теории подобия.
Под углом на плане скоростей к отрезку проводим линии слева и справа относительно отрезка .

Длину отрезка определяем из подобия:

Из точки откладываем отрезок на проведенных из точки под углом. За точку С плана скоростей принимаем ту из полученных точек, при которой порядок букв будет одинаковым на плане скоростей и на плане механизма.
1.2.6 Определение скорости точки



Абсолютную скорость точки D шатуна представляем виде векторной суммы переносной и относительной скоростей:



В этих уравнениях скорость точки известна по величине и направлению, скорость. Относительные скорости известны по линиям действия:

перпендикулярно звену ;

параллельно оси направляющей ползуна.


Через точку плана скоростей проводим перпендикулярно звену линию действия скорости, а через полюс линию действия скорости. Точка пересечения этих направлений определяет конец вектора скорости точки D.
1.2.7 Определение величин скоростей точек механизма.





1.2.8 Определяем угловые скорости звеньев.



- 1.3 Определение ускорений точек механизма
- 1.3.1 Определяем ускорение точки А
Поскольку звено (кривошипа) вращается равномерно, то точка, А имеет только нормальное ускорение, которое направлено по звену к центру вращения.

1.3.2 Масштаб плана ускорений.
Принимаем отрезок, который будет изображать на плане ускорение точки A кривошипа .




Из произвольной точки на чертеже, принятой за полюс плана ускорений, откладываем отрезок параллельно звену в направлении от точки, А к точке отрезок .
1.3.3 Определяем ускорение точки В
Для определения ускорения точки используем векторные уравнения.


В этих уравнениях ускорение по величине и направлению, ускорение т. к. стойка неподвижна.
1.3.4 Определяем нормальное ускорение



Из точки плана ускорений параллельно звену в направлении от точки В к точке, А откладываем отрезок изображающий ускорение.





Через точку проводим перпендикулярно звену линию действия вектора тангенциального ускорения .


Затем из полюса плана ускорений, совпадающей с точкой параллельно звену в направлении от точки и точке откладываем отрезок, изображающий ускорение.




Через точку проводим перпендикулярно звену линию действия вектора тангенциального ускорения .


На пересечении линий действия векторов тангенциальных ускорений получаем точку конец вектора, изображающего ускорение точки В механизма.


Вектор изображает полное относительное ускорение точки B во вращении вокруг точки A.
1.3.5 Определяем ускорение точки
Ускорение точки С находим из теории подобия, аналогично определению скорости точки С.


1.3.6 Определяем ускорение точки.
Для определения ускорения точки D используем векторные уравнения.
Нормальное ускорение.





Вектор ускорения направлен от точки D к точке С параллельно звену, вектор тангенциального ускорения перпендикулярно звену. Известна линия действия ускорения параллельно оси направляющих ползуна.

Из точки плана ускорений параллельно звену в направлении от точки D к точке С откладываем вектор изображающий нормальное ускорение .




Из точки, совпадающей с точкой плана ускорений перпендикулярно звену проводим линию действия вектора тангенциального ускорения. Поскольку, то через полюс проводим линию действия ускорения. Точка пересечения этих линий определяет конец вектора, изображающего абсолютное ускорение точки D.
1.3.7 Определяем величины ускорений точек механизма.








1.3.8 Определяем ускорения звеньев механизма.




Задача 2.
Для зубчатого механизма, включающего планетарный или дифференциальный механизм и пару зубчатых колес с внешним зацеплением, определить передаточное число и незаданные угловые скорости или частоты вращения колес и водила. Расчеты произвести аналитическим методом. Неизвестное число зубьев одного из колес эпициклического механизма найти из условия соосности его центральных колес.
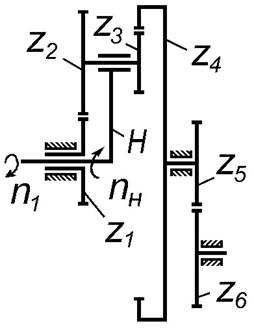
Рисунок 2 — Схема эпициклического механизма Дано:, ,, ,, ,, ,.









Решение:



2.1 Механизм состоит из эпициклического механизма и внешней пары и. Эпициклический механизм включает в себя центральные колеса и, сателлиты и и водила Н.



Эпициклический механизм является дифференциальным, т.к. оба центральных колеса являются подвижными.
2.2 Из условия соосности определяем число зубьев колеса.



2.3 Определяем передаточное число всего механизма.

где — передаточное число всего механизма.

— передаточное число эпициклического механизма;

— передаточное число внешней пары;
Для определения передаточного числа эпициклического механизма используем уравнение Виллиса.
В то же время.




2.4 Определяем передаточное число внешней пары.
2.5 Определяем частоту вращения колеса.

т. к. колеса и закреплены на одном валу.


2.6 Определяем частоту вращения колеса.



2.7 Определяем частоту вращения колеса.



Список использованых источников.
- 1. Анализ рычажных механизмов: учебно-методическое пособие / Т. В. Цветкова, М. Ю. Кабакова. — Архангельск: Изд-во ФГАОУ ВПО «Северный (Арктический) федеральный университет имени М.В. Ломоносова», 2011, — 105 с.
- 2. Артоболевский И. И. Теория механизмов и машин: Учеб. для втузов. — 4-е изд., перераб. и доп. -М.: Наука. Гл. ред. физ.-мат. лит., 1988. -640 с.
- 3. К. В. Фролов, С. А. Попов, А. К. Мусатов, Д. М. Лукичев и др. Теория механизмов и машин: Учеб. для втузов/К. В. Фролов, С. А. Попов, А. К. Мусатов и др.; Под ред. К. В. Фролова.—М.: Высш. шк., 1987.—496 с
- 4. Левитская О. Н., Левитский Н. И. Курс теории механизмов и машин: Учеб. пособие для мех. спец. вузов. —2-е изд., перераб. и доп. — М.: Высш. шк., 1985. —279 с