Разработка структурной схемы дискретной СПР
Согласно критерию Джури модуль АФЧХ на частоте квантования соответствует следующей формуле: Структурная схема дискретной системы подчиненного регулирования изображена на рисунке 3. Рисунок 3 — Структурная схема дискретной системы подчиненного регулирования. Вычислим период квантования с помощью программной среды MathCAD: Wзт (р) — передаточная функция замкнутого контура тока; Выведем передаточную… Читать ещё >
Разработка структурной схемы дискретной СПР (реферат, курсовая, диплом, контрольная)
Разработаем структурную схему дискретной системы подчиненного регулирования, которая имеет один контур с цифровым регулятором, внутренняя часть системы будет представлять собой замкнутый контур тока, в качестве ЦАП будем использовать экстраполятор нулевого порядка.
Структурная схема дискретной системы подчиненного регулирования изображена на рисунке 3.
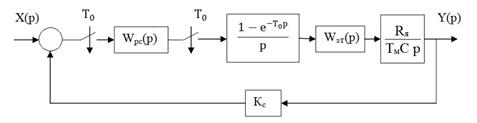
Рисунок 3 — Структурная схема дискретной системы подчиненного регулирования.
где: WРС(р) — цифровой регулятор скорости;

Wзт(р) — передаточная функция замкнутого контура тока;
Кс — коэффициент передачи датчика скорости;
Т0 — период квантования.
Определение периода квантования дискретной системы по критерию Джури
При использовании критерия Джури период квантования выбираем, исходя из максимальной рабочей частоты аналогового объекта управления, который находится исходя из АФЧХ замкнутой системы, которая состоит из аналогового объекта и цифрового регулятора.
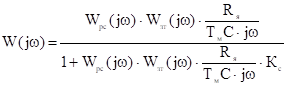
Выведем передаточную функцию АФЧХ замкнутой системы:


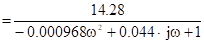
.
Согласно критерию Джури модуль АФЧХ на частоте квантования соответствует следующей формуле:
.
Где е — ошибка регулирования.
Согласно заданию к курсовому проекту е=0.05.
Вычислим период квантования с помощью программной среды MathCAD: