Динамическое торможение двигателя параллельного возбуждения
Торможение широко применяется в электроприводах грузоподъемных механизмов для предварительного сброса скорости перед срабатыванием основного, электромагнитного тормоза, обеспечивающего полную остановку груза. При активном статическом моменте процесс может иметь продолжение, а именно: если в точке 0 двигатель не затормозить, он под действием груза реверсирует и станет разгоняться в обратном… Читать ещё >
Динамическое торможение двигателя параллельного возбуждения (реферат, курсовая, диплом, контрольная)
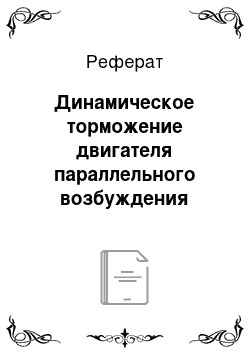
В схеме динамического торможения (рис. 8, а) используются контакт КТ тормозного контактора контакт КЛ линейного. Эти контакты всегда находятся в противоположном состоянии: если замкнут контакт КЛ, разомкнут контакт КМ, и наоборот.
Рис. 8. Схема (а) и механические характеристики (б) при динамическом торможении двигателя постоянного тока
До начала торможения, при работе двигателя, контакт КЛ замкнут, контакт КТ разомкнут. Двигатель подключен к сети и вращается со скоростью щ.
Ток в обмотке якоря:
I= (U — E) / r,.
Е = k щФ.
— противоЭДС обмотки якоря, прямо пропорциональная скорости двигателя щ.
Этот ток протекает через якорь в направлении слева направо (в соответствии с полярностью напряжения питающей сети).
Для торможения размыкают контакт КЛ и замыкают КТ. При размыкании контакта КЛ двигатель отключается от сети, поэтому напряжение на обмотке якоря U = 0.
При замыкании контакта КТ к обмотке якоря двигателя подключается тормозной токоограничивающий резистор r, причём обмотка якоря и резистор соединены последовательно.
Ток в такой цепи определяется по закону Ома:
I= (U — E) / (r+ г) = (0-Е)/ (r+ г) = - Е/(r+ г).
В этой формуле ток якоря имеет знак «минус», значит, направление тока в обмотке якоря изменилось на обратное — справа налево.
Изменение направления тока приводит к изменению знака электромагнитного момента двигателя М = k (-I)Ф <0, этот момент становится тормозным.
Двигатель переходит на искусственную тормозную характеристику во 2-м квадранте и постепенно уменьшает скорость. По мере уменьшения скорости уменьшается противоЭДС:
Е = k щФ, ток якоря и электромагнитный момент.
В момент остановки якоря (точка 0 на механической характеристике) скорость щ = 0, противоЭДС Е = 0, ток якоря I= 0 и электромагнитный момент двигателя М = 0.
При реактивном статическом моменте (насос, вентилятор) процесс торможения закончится в точке 0.
При активном статическом моменте процесс может иметь продолжение, а именно: если в точке 0 двигатель не затормозить, он под действием груза реверсирует и станет разгоняться в обратном направлении до скорости щ.
Полярность противоЭДС изменится на обратную, т.к.
Е = k (- щ) Ф <,.
поэтому также на обратное изменится направление тока якоря:
I= - (- Е) /(r+ г) = Е /(r+ г) > 0.
Поэтому изменится на обратный знак электромагнитного момента, т. е. он вновь стал вращающим, направленным на подъём. При этом двигатель работает в режиме тормозного спуска, притормаживая груз и ограничивая скорость спуска груза значением скорости щ (точка А).
Особенности торможения:
- 1. Простота торможения, т.к. для его получения нужен тормозной контактор КТ и тормозной резистор;
- 2. Торможение позволяет полностью остановить якорь (т. «0» на рис. 8, б);
- 3. торможение широко применяется в электроприводах грузоподъемных механизмов для предварительного сброса скорости перед срабатыванием основного, электромагнитного тормоза, обеспечивающего полную остановку груза.