Структура блока обработки данных мультисенсорной системы для мониторинга концентраций ионов тяжелых металлов в водных средах
Вторая подпрограмма решает задачу количественной идентификации. В режиме обучения (рис.3) применяется ранее сформированный в первой подпрограмме массив целевых концентраций Ct. Информация о номере кластера a, к которому относится вектор разностей потенциалов, позволяет удалить избыточные части обучающих массивов и повысить точность обучения ИНС. В данной подпрограмме используются радиальные… Читать ещё >
Структура блока обработки данных мультисенсорной системы для мониторинга концентраций ионов тяжелых металлов в водных средах (реферат, курсовая, диплом, контрольная)
Структура блока обработки данных мультисенсорной системы для мониторинга концентраций ионов тяжелых металлов в водных средах
В настоящее время все более актуальной становится проблема химического загрязнения водных сред. Одним из наиболее опасных классов загрязнителей являются тяжелые металлы. Они могут поступать в водоёмы вместе со сточными водами, ливневым стоком и иными путями. Соответственно возникает задача мониторинга загрязнителей в сточных водах и воде водоемов разнообразного назначения. Использование отдельных селективных сенсоров для количественного определения загрязнителей в отдельности часто является недостаточно эффективным методом мониторинга. Главная причина недостаточной эффективности — чувствительность селективного сенсора к нецелевым (мешающим) компонентам анализируемой среды. Экологические и технологические водные среды могут иметь сложный многокомпонентный состав, который в ряде случаев может быть чрезвычайно специфичным, что может налагать существенные ограничения на точность измерений традиционными методами. Таким образом, возникает необходимость в разработке мультисенсорных систем — устройств количественного химического экспресс-анализа, в которых вышеуказанный недостаток отдельных сенсоров может быть использован как преимущество. Количественное определение химического состава среды в случае применения мультисенсорной системы является задачей распознавания образов, если система предварительно обучена на определенном наборе образов — наборе интегральных откликов сенсоров ко всем анализируемым компонентам среды [1 — 3].
Любая мультисенсорная система включает массив сенсоров, блок сбора данных и блок обработки данных. На этапе разработки мультисенсорной системы в качестве сенсоров выбраны ионоселективные электроды (ИСЭ), поскольку они являются стандартными высокоточными сенсорами с хорошо известными рабочими характеристиками. Блок сбора данных является программно-аппаратной частью системы. В настоящей работе он не рассматривается. Блок обработки данных — программный компонент мультисенсорной системы. Он реализуется посредством специальных алгоритмов, составленных на языке программирования высокого уровня. На настоящем этапе работы был использован язык программирования пакета прикладных программ MATLAB.
На вход блока обработки данных поступает измерительная информация (разности потенциалов ИСЭ) от массива сенсоров через посредство блока сбора данных. На выходе блока обработки формируется вектор-столбец концентраций идентифицируемых компонентов анализируемой среды. Входные данные обрабатываются в два этапа [4, 5], что соответствует двум реализуемым подпрограммам. Существуют два режима выполнения каждой подпрограммы — режим обучения и рабочий режим.
Первая подпрограмма решает задачу кластеризации входных данных. В режиме обучения (рис.1) посредством генератора псевдослучайных чисел (ГПСЧ) формируется массив целевых концентраций Ct в пределах определённого диапазона, соответствующего чувствительности ИСЭ. Исходя из полученного массива по уравнению Никольского — Эйзенмана [1, 2] рассчитывается массив разностей потенциалов. Массив разностей потенциалов поступает на вход искусственной нейронной сети (ИНС) — сети Кохонена. На выходе сеть выдает вектор кластеризации. Весовые коэффициенты сети сохраняются в памяти ЭВМ.
мониторинг тяжелый металл водный.

Рисунок 1 Алгоритм кластеризации в режиме обучения.
В рабочем режиме первой подпрограммы (рис.2) на вход сети Кохонена поступает вектор разностей потенциалов E — результат измерения электродных потенциалов ИСЭ в конкретной анализируемой среде. Ранее обученная сеть Кохонена выдаёт на выходе номер кластера a, к которому относится вектор E.
Вторая подпрограмма решает задачу количественной идентификации. В режиме обучения (рис.3) применяется ранее сформированный в первой подпрограмме массив целевых концентраций Ct. Информация о номере кластера a, к которому относится вектор разностей потенциалов, позволяет удалить избыточные части обучающих массивов и повысить точность обучения ИНС. В данной подпрограмме используются радиальные базисные сети (РБФ-сети) [4, 6]. Их количество N соответствует числу идентифицируемых компонентов. Размерность их входа равна числу строк в обучающем массиве разностей потенциалов. Каждая РБФ-сеть имеет только один выход. Для обучения каждой такой сети массив целевых концентраций (по которому рассчитывался массив разностей потенциалов) разделяется на N отдельных векторов. В процессе обучения определяются весовые коэффициенты для каждой нейронной сети. Они сохраняются в памяти ЭВМ.
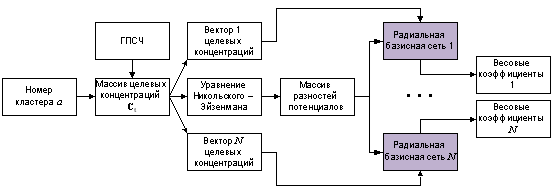
Рисунок 3 Алгоритм количественной идентификации в режиме обучения.
В рабочем режиме количественной идентификации (рис.4) тот же самый вектор E поступает на вход каждой РБФ-сети. Числа, выдаваемые на выходе нейронных сетей, объединяются в определённой последовательности в единый вектор — вектор расчетных концентраций.
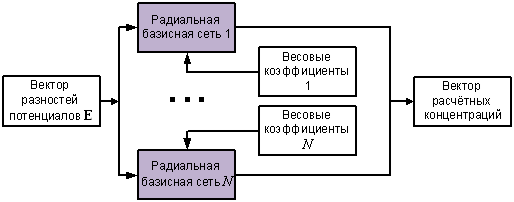
Рисунок 4 Алгоритм количественной идентификации в рабочем режиме.
Таким образом, первая подпрограмма обучается однократно. Вторая подпрограмма переобучается вновь каждый раз при вводе вектора разностей потенциалов E. Нейросетевая архитектура подобрана [4, 5] так, что программа выполняется на персональной ЭВМ IBM PC со сравнительно небольшими затратами вычислительных ресурсов, что позволяет проводить обучение заново при анализе каждой новой пробы. С целью повышения удобства работы с блоком обработки данных созданы разные варианты графического интерфейса пользователя.
В дальнейшем планируется модифицирование блока обработки данных, разработка блока сбора данных и экспериментирование с разными типами сенсоров в массиве сенсоров [7]. Предполагается создание графического интерфейса пользователя, позволяющего в широких пределах модифицировать рабочую структуру алгоритмов, используемых в блоке обработки данных. Планируется также расширение номенклатуры идентифицируемых компонентов анализируемых водных сред.
Исследование выполнено при поддержке Министерства образования и науки Российской Федерации, соглашение 14. А18.21.2097 «Разработка автоматизированной системы мониторинга для контроля и прогнозирования состояния окружающей среды».
- 1. Власов Ю. Г., Легин А. В., Рудницкая А. М. Электронный язык — системы химических сенсоров для анализа водных сред // Рос. хим. ж. — 2008, т. LII, № 2. — С. 101- 112.
- 2. Милешко Л. П., Котов В. Н., Королев А. Н., Черепахин И. И., Щербинин И. П. Мультисенсорные системы: Учебное пособие. — Таганрог: Изд-во ТТИ ЮФУ, 2009. — 236 с.
- 3. Алхасов С. С. Разработка мультисенсорной системы «электронный язык» на основе сенсоров с анодными оксидными плёнками. // VIII Ежегодная научная конференция студентов и аспирантов базовых кафедр Южного научного центра РАН: Тезисы докладов (11−26 апреля 2012 г., г. Ростов-на-Дону). — Ростов н/Д: Изд-во ЮНЦ РАН, 2012. — С. 177−178.
- 4. Алхасов С. С., Милешко Л. П., Целых А. А. Разработка блока обработки информации мультисенсорной системы «электронный язык» для мониторинга концентраций ионов тяжёлых металлов в водных средах. // Известия ЮФУ. Технические науки. — № 6 (131), 2012. — С. 242−244.
- 5. Алхасов С. С. Нейросетевые алгоритмы в блоке обработки данных мультисенсорной системы для мониторинга концентраций ионов тяжелых металлов в водных средах. // XI Всероссийская научная конференция молодых ученых, студентов и аспирантов «Техническая кибернетика, радиоэлектроника и системы управления»: Сборник материалов. — Таганрог: Изд-во ЮФУ, 2012. — Т. 1. — С. 141.
- 6. Медведев В. С., Потемкин В. Г. Нейронные сети. MATLAB 6. — М.: ДИАЛОГ-МИФИ, 2002. — 496 с.
- 7. Власов Ю. Г., Ермоленко Ю. Е., Легин А. В., Рудницкая А. М., Колодников В. В. Химические сенсоры и их системы. // ЖАХ. — 2010, т. 65, № 9. — С. 900−919.