Безитерационный метод расчета скольжения асинхронного двигателя в задачах сельскохозяйственного электропривода
В-третьих, каталожными (справочными) данными АД являются координаты узлов идеального холостого хода, номинального режима и максимального момента (критического скольжения), поэтому в качестве узлов исходной функции, заданной в табличной форме, целесообразно использовать координаты этих точек. Параметры короткого замыкания должны использоваться для определения эквивалентного сопротивления двигателя… Читать ещё >
Безитерационный метод расчета скольжения асинхронного двигателя в задачах сельскохозяйственного электропривода (реферат, курсовая, диплом, контрольная)
Безитерационный метод расчета скольжения асинхронного двигателя в задачах сельскохозяйственного электропривода
Асинхронные короткозамкнутые электродвигатели (АД) — основные электроприводы машин и механизмов промышленных и сельскохозяйственных предприятий. Состав электрифицированной дождевальной машины «Кубань-Э» [1]: 16 двигателей самоходных тележек, двигатель оросительного насоса и вспомогательные двигатели. В случае применения этой машины в составе электротехнического мостового комплекса совместно с электротрактором и электрифицированными рабочими машинами полеводства, число двигателей возрастает. Электрическая сеть имеет общую протяженность около 4 км [2]. Сопротивления участков этой линии имеют значительные падения напряжения, которые должны учитываться при расчетах.
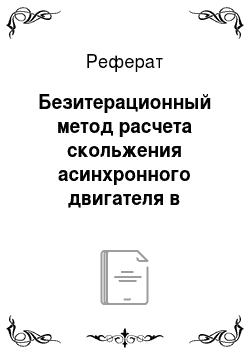
Для таких электроустановок важен расчет токов на участках электрической цепи (сети) и напряжений на зажимах двигателей при различной механической нагрузке двигателей. Расчет статического режима разветвленной электрической цепи электроустановки решается методами теории цепей и определением расчетного сопротивления электродвигателей в составе этой цепи. В цепях, где отсутствуют однофазные и несимметричные электроприемники и не создаются условия несимметрии процессов в трехфазной цепи, расчеты ведутся для одной фазы. Такие цепи характерны для задач сельскохозяйственного электропривода, где электроприемники представлены трехфазными асинхронными короткозамкнутыми электродвигателями, симметричными по своей природе. Эти электродвигатели в составе цепи представляются Тили Г-образными схемами замещения [3] (рисунок 1).
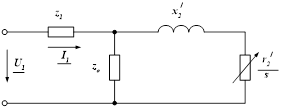
Рисунок 1. Т-образная схема замещения АД: z1 — полное (комплексное) сопротивление рассеяния обмотки статора; zо — сопротивление ветви намагничивания; x2? — приведенное индуктивное сопротивление рассеяния обмотки ротора; r?2/s — сопротивление, отражающее электрические потери в обмотке ротора и механическую мощность двигателя U1 — напряжение, приложенное к двигателю; I1 — ток двигателя
Очевидно, что эквивалентное сопротивление асинхронного электродвигателя в комплексной форме определяется по формуле.
.
электрический цепь асинхронный электродвигатель где — знак мнимой части комплексного числа; z1 = r1 + jx1 — комплексное сопротивление рассеяния обмотки статора; z0 — то же ветви намагничивания.
Определение эквивалентного сопротивления этих схем (рисунок 1) существенно усложняется необходимость определения расчетного скольжения асинхронного двигателя, являющегося, в простейшем случае, функцией механической нагрузки (момента сопротивления вращению, создаваемого рабочей машиной), амплитуды и частоты напряжения на статорной обмотке [4−5]. На скольжение могут влиять, также, несимметрия трехфазного напряжения, его несинусоидальность, случайные изменения механической нагрузки [6]. Погрешность в определении скольжения в 0,001 относительных единиц приводит к значительному увеличению погрешности конечных результатов расчетов электрических цепей вследствие накопления ошибок в многодвигательном электроприводе, а также вследствие выполнении итерационных вычислений при использовании численных методов вычислений, при которых накапливается вычислительная погрешность.
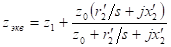
Для определения скольжения используются уравнение электромагнитного момента электродвигателя и уравнение механической характеристики рабочей машины, приведенное к валу электродвигателя. Известные уравнения электромагнитного момента (механической характеристики) АД [3] вида.
(1).
(2).
где М — электромагнитный момент; Мк — критический (максимальный) электромагнитный момент; m1 — число фаз; U1 — фазное напряжение на обмотке статора; s — скольжение; sк — критическое скольжение; Щ1 — угловая частота вращения магнитного поля; r1, r'2, x1, x'2 — соответственно активные и индуктивные сопротивления рассеяния обмотки статора и приведенной обмотки ротора, вследствие того, что они отражают процессы в электродвигателях в рамках традиционных допущений о постоянстве значений параметров r'2, x'2, без учета насыщения магнитной цепи, дают значительную погрешность при выполнении расчетов статических режимов работы электропривода. Особенно остро эта погрешность проявляется в задачах с электродвигателями, подверженными перегрузке при изменяющемся напряжении питающей сети, что часто имеет место в задачах сельскохозяйственного электропривода.
Для расчетов электрической цепи с АД требуется более удобная для расчетов, чем уравнения (1) и (2) аппроксимация экспериментальной механической характеристики АД. С точки зрения теории приближения экспериментальную механическую характеристику АД на рабочем участке требуется аппроксимировать функцией, дающей погрешность (норму приближения) не меньшей величины, чем указанные уравнения.
Известно, что в задачах аппроксимации важнейшее значение имеет априорная информация об исходной функции. Отметим следующие особенности экспериментальной механической характеристики АД.
Во-первых, статический режим АД как правило реализуется на устойчивой части механической характеристики, со скольжением s в интервале [0; sк] и приемлемая погрешность аппроксимации должна быть обеспечена на этом участке характеристики.
Во-вторых, в области существования скольжения s интервала [0; sк] механическая характеристика АД является гладкой и дифференцируемой, т. е. не имеющей характерных «выбросов» и изломов, поэтому для отыскания аппроксимирующей функции целесообразно использовать среднеквадратичную норму приближения о.
(3).
где m (s, U) — исходная экспериментальная механическая характеристика; m (s, U, ai) — аппроксимирующая функция, вид которой задан, а коэффициенты ai которой должны быть определены при аппроксимации.
В-третьих, каталожными (справочными) данными АД являются координаты узлов идеального холостого хода, номинального режима и максимального момента (критического скольжения), поэтому в качестве узлов исходной функции, заданной в табличной форме, целесообразно использовать координаты этих точек. Параметры короткого замыкания должны использоваться для определения эквивалентного сопротивления двигателя в процессе пуска. Уравнения (1) и (2) дают неприемлемо большую погрешность расчетов при скольжениях близких к единице, вследствие проявления вытеснения тока в стержнях обмотки ротора, значительного насыщения зубцовых зон статора и ротора и др. Использование большего числа узловых точек означало бы недостаточность каталожных данных АД и потребовало бы проведения специальных экспериментов с регулированием нагрузки и напряжения питания, что не всегда представляется возможным на стадии исследования или проектирования электрооборудования.
В современных машинах и механизмах используют различные виды управления электроприводом на базе короткозамкнутого АД. Наиболее часто применяются нерегулируемые приводы при номинальном напряжении питания U = Uн, нерегулируемые приводы при напряжении, изменяющемся в некотором диапазоне вследствие нестабильности напряжения в питающей сети, приводы, регулируемые искусственным изменением напряжения питания, и частотнорегулируемые. Каждый из этих случаев требует своих методов расчета электрической цепи. В данном случае рассматривается задача с нерегулируемым электроприводом с напряжением, изменяемым вследствие непостоянства падений напряжения на участках электрической цепи. Это наиболее распространенный тип привода в сельскохозяйственных электроустановках и задача расчета цепи с такими двигателями является типовой.
Попытки аппроксимации механической характеристики АД при U = Uн степенным полиномом, степенной, показательной, логарифмической, тригонометрической и экспоненциальной элементарными функциями дали следующие результаты. Степенная, показательная, тригонометрическая и логарифмическая не обеспечивают норму приближения о = 0,005 и потому неприемлемы. Степенной полином Лагранжа обеспечивает норму приближения о = 0,008 при четвертой и более высокой степени полинома. Но для такой аппроксимации недостаточно координат трех указанных выше точек, узлов требуется минимум пять.
Лучшие результаты дает аппроксимирующая функция, где m — электромагнитный момент, а и b коэффициенты, е — основание натурального логарифма. Оно обеспечивает норму приближения о = 0,0005 при соответствующих значениях a и b. Для определения коэффициентов a и b достаточно координат трех указанных выше узлов, что позволяет вычислять их значения на основании каталожных данных АД. Принципиально важно, что это уравнение дает возможность аналитического решения совместно с уравнением механической характеристики рабочей машины, заданным в традиционном виде.
(4).
где mс — расчетный момент сопротивления рабочей машины, m0 — момент трогания, mсн — момент сопротивление в режиме номинальной нагрузки, Щрн — номинальная угловая частота вращения рабочей машины, Щ — то же, расчетная, v — показатель степени, отражающий особенности рабочей машины (справочная величина).
Указанные достоинства делают этот вариант аппроксимации механической характеристики предпочтительным для задач расчета цепей с электродвигателями.
Аппроксимация механической характеристики АД при регулируемом напряжении питания имеет лучшее приближение при использовании уравнения вида.

(5).
где a, b, с — коэффициенты аппроксимирующей функции; u — напряжение на двигателе в относительных единицах (по отношению к номинальному напряжению, u = U/Uн).
Значения коэффициентов a и b определяются на основании каталожных данных электродвигателя по координатам режимов идеального холостого хода, номинального и критической (максимального момента). Для АД серии RA 0,6−45 кВт коэффициент «с» имеет значение 0,3. Для двигателей других серий должен определяться дополнительными исследованиями.
Выражение (4) является общепринятым в теории электропривода. Оно с достаточной для большинства расчетов точностью описывает механическую характеристику большинства РМ. Вместе с тем, в литературе приводятся данные о случаях, когда уравнение (4) не является удовлетворительной аппроксимацией экспериментальной механической характеристикой [6].
Вместе с тем, анализ механических характеристик сельскохозяйственных РМ показывает, что значительные погрешности уравнение (4) дает в области малых частот вращения, где проявляются особенности пуска ряда сельхозмашин с большим моментом трогания. Это обстоятельство весьма существенно при анализе возможности процесса пуска привода и динамики пуска. Однако в диапазоне рабочих скоростей РМ при статическом режиме работы механические характеристики сельскохозяйственных РМ с детерминированной нагрузкой уравнением (4) описываются достаточно точно.
После выполнения расчетных операций приведения момента и частоты вращения к валу электродвигателя, уравнение (4) приобретает вид.
(6).
Традиционно для совместного решения уравнений механических характеристик АД и РМ используется графо-аналитический метод, плохо адаптированный к использованию в математических моделях. В условиях изменяющихся нагрузок и взаимного влияния напряжения питания многодвигательного электропривода расчеты требуют больших затрат времени вследствие применения циклических вычислений и многократной интерполяции характеристик АД при различных напряжениях питания. Для расчетов разветвленной электрической цепи с многодвигательных приводом требуется минимизировать циклические операции применением «прямых» алгоритмов вычисления. В отношении совместного решения уравнений (3) и (6) такую возможность дает метод возмущений [7].
Совместное решение уравнений (3) и (6) при исключении момента m дает.

(7).
где (8).

(9).
При использовании метода возмущений принципиальное значение имеет выбор стратегии решения задачи. Общий смысл решения уравнения этим методом заключается в том, что решение представляется в виде сходящегося ряда. Наиболее часто используется ряд по степеням малого параметра возмущения. В этом случае решение ищут в виде ряда.

(10).
где s0 — корень невозмущенного уравнения, т. е. уравнения, получаемого из исходного наложением упрощающего его условия е = 0; s1, s2 — коэффициенты, не зависящие от е, определение которых и означает решение задачи расчета скольжения. Слагаемые в правой части уравнения (10), кроме s0, есть поправки к корню невозмущенного уравнения для приближения к корню исходного уравнения (возмущенного).
Искать решение уравнения в виде ряда (10) имеет смысл тогда, когда ряд будет достаточно быстро сходящимся. А это, в свою очередь, зависит от вида решаемого уравнения, значения коэффициентов и также от удачного выбора параметра возмущения и формы разложения. В выше сформулированной задаче определения расчетного скольжения лучшие результаты дает использование в качестве параметра возмущения е = 1 в скорректированном с его учетом уравнении (7).

(11).
Далее выполним разложение выражения (1 — еs)v в степенной ряд по биному Ньютона.

(12).
Наш опыт применения указанного метода для расчета электрической цепи показывает, что целесообразно сохранить члены ряда при степени е не выше второго. Остальные члены ряда имеют пренебрежимо малое значение. Сохраняя указанные члены ряда, из уравнений (12) получим.

(13).
После подстановки уравнения (13) в уравнение (11), получим.

(14).
В уравнении (14) выделим отдельные члены при разных степенях е и приравняем к нулю каждый из них. Тогда, при е0 имеем член:

(15).
при е1: (16).

при е2: (17).
Приближенное решение уравнения (14) s0 получим как решение уравнения (15) при s = s0
(18).
После подстановки в уравнение (18) значений h1 и h2 из (8) и (9) можно видеть, что приближенное решение s0 можно интерпретировать как значение скольжения АД при заданном напряжении U на двигателе и величине момента сопротивления РМ, соответствующего синхронной частоте вращения АД.
Значение первой поправки s1 определится как решение уравнения.
(19).
где — знак частной производной по скольжению. Это уравнение после подстановки значения частной производной и функции Р1(s0) принимает вид.

(20).
или, с учетом уравнения (18).

(21).
Из уравнения (21) следует, что.
(22).
Вторую поправку s2 определим как решение уравнения.
(23).
которое после раскрытия частных производных принимает вид.

(24).

или (25).
Решение уравнения (25) относительно s2
(26).
Обратим внимание на два обстоятельства.
Во-первых, значение поправок зависимы от решения «невозмущенного» уравнения и их вычисление поддается алгоритмизации.
Во-вторых, ряд (10) является быстросходящимся, поскольку в задачах расчета электрической цепи с электродвигателями vh1/[b(h1+h2)] << 1.
Из этого следует, что принятая стратегия применения метода возмущений является удачной, а достаточная точность решения обеспечивается при использовании трех первых членов разложения.
Запишем решение в окончательном виде.
(27).
В более общем виде, с учетом (18) уравнение (27) может быть представлено в форме:
(28).
где n — максимальная степень учитываемых членов ряда.
Для косвенной оценки погрешности предложенного метода расчетов двигателя в приводе центробежного насоса (v = 2) при номинальном напряжении (U = 1) и совпадающих моментах и частотах вращения АД и РМ, выполненных традиционным методом и по предложенному методу. В качестве контрольного значения используется номинальное (паспортное) скольжение двигателя, поскольку при заданных условиях имеет место номинальный режим АД. Тип двигателя RА160М4У3.
Расчетные показатели асинхронного двигателя при разных методах расчета.
Расчетные формулы. | Значение параметров, о.е. | Расчетное скольжение. | Погрешность, %. | |
Паспортные данные. | sк = 0,16. mк = 2,3. | sн = 0,022. | ; | |
s = sк/(bc-1); bc = mкku/Mc; ku = Uд/Uн | ku = 1; Mc = 1; bc = 2,3. | 0, 0696. | ||
Формула (29). | а = 2,34; b = 25; m0 = 0,1; mсн = 1; Щ1/Щнр = 1,022. | 0,0233. | 1,36. | |
электрический цепь асинхронный электродвигатель Зависимость скольжения АД от подведенного напряжения, которое само является расчетной величиной, заставляет использовать циклические расчеты для определения токов и напряжений как расчетных переменных величин электрической цепи. Метод расчета может быть реализован следующей схемой расчета. На первом шаге итерационных расчетов напряжение на всех АД принимается равным напряжению источника питания, если этот источник единственный, или номинальному, если источников несколько, и определяется скольжение и расчетное эквивалентное комплексное сопротивление двигателей. Затем, одним из известных методов расчета электрических цепей определяются токи в ветвях разветвленной электрической цепи и определяются расчетных значения напряжений на двигателях. На следующем шаге итерации уточняются значения скольжения всех двигателей с учетом изменившегося напряжения на них, и повторно производится расчет цепи по ранее принятому алгоритму.
Полученные результаты расчетов токов и напряжений сравнивают с соответствующими значения этих величин на предыдущем шаге итерации и, в случае превышения погрешности хотя бы одной из значащих переменных допустимого значения, расчеты повторяются на следующем шаге итерации при уточненных значениях напряжения на двигателях. Итерации прекращают, когда расчетные величины двух последних шагов отличаются на величину меньше допустимой погрешности.
В ряде задач требуемой точности следует добиться не для всех искомых переменных цепи, а только одной или нескольких из них [8−11]. В этом случае можно ограничиться сравнением только этих показателей последних шагов итерации, что может сократить время вычисления.
При использовании в качестве расчетного метода расчета электрической цепи методом эквивалентного сопротивления [12], блок-схема расчета выглядит следующим образом.
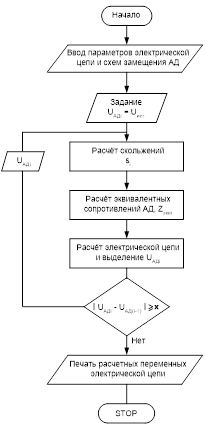
Рисунок 2. Блок-схема расчета разветвленной электрической цепи с АД В заключение отметим, что указанный метод расчета электрической цепи с АД прошел апробацию при расчете электрической цепи электротехнического комплекса мостового земледелия на базе дождевальной машины «Кубань-Э» [13−17] и показал свою эффективность. В частности, не выявлены случаи неустойчивости в решения задачи. Решения были устойчивыми как в задачах расчета цепи с нагруженными двигателями и в расчетах с двигателями в начале процесса пуска.
Уточненное прогнозирование значений переменных электрических величин в разветвленных электрических цепях позволяет оптимизировать параметры электродвигателей и проводников, что сопровождается значительным экономическим эффектом [18, 19].
- 1. Королев В. А. Рабочий агрегат автоматизированного комплекса на базе дождевальной машины/ В. А. Королев, П. Ф. Османов, В. Ю. Арзамасцев, И. Г. Стрижков // Ж. Техника в с.х., 1992, № 2−3
- 2. Стрижков И. Г. Технологический комплекс на базе ЭДМФ «Кубань» / И. Г. Стрижков, Е. Н. Чеснюк, А. Н. Трубин, С. И. Стрижков // Ж. Механизация и электрификация с.х., 2005, № 2, с. 4−6.
- 3. Копылов И. П. Электрические машины. / И. П. Копылов. — М.: Высш. шк.; Логос; 2000. — 607 с.
- 4. Сергеев П. С. Проектирование электрических машин / П. С. Сергеев, Н. В. Виноградов, Ф. А. Горяинов. — М.: Энергия, 1969. -632 с.
- 5. Пястолов А. А. Расчет цепей с асинхронными электродвигателями / А. А. Пястолов, И. Г. Стрижков // Ж. Техника в с.х., 1993, № 4, с. 22−23.
- 6. Оськин С. В. Автоматизированный электропривод / С. В. Оськин. Учеб. для вузов. — Краснодар: Изд-во ООО «Крон», 2014, 511 с.
- 7. Найфэ А.
Введение
в методы возмущений / А. Найфэ. — М.: Мир, 1984.
- 8. Стрижков И. Г. Электрооборудование мобильных насосных установок / И. Г. Стрижков, Е. Н. Чеснюк, Р. Р. Бегляров. Материалы науч.-практ. конф. преподавателей. — Краснодар: КубГАУ, 2014. — с. 591−592.
- 9. Оськин С. В. Надежность технических систем и экологический, экономический ущербы в сельском хозяйстве. / С. В. Оськин, Б. Ф. Тарасенко // Политематический сетевой электронный научный журнал Кубанского государственного аграрного университета. 2014, № 101, с. 985−1004.
- 10. Оськин С. В. Повышение надежности электропривода сельскохозяйственных машин / С. В. Оськин // Механизация и электрификация сельского хозяйства. 1996, № 3. С. 19
- 11. Оськин С. В. Энергосбережение в насосных установках систем мелиорации и орошения / С. В. Оськин, В. А. Дидыч // Известия Академии электротехнических наук РФ. 2011, № 2, с. 55.
- 12. Демирчян К. С. Теоретические основы электротехники — В 3-х т. Учебник для вузов. Том 1. — 4-е изд. / К. С. Демирчян, Л. Р. Нейман, Н. В. Коровкин, В. Л. Чечурин. — СПб.: Питер, 2003. — 463 с.: ил.
- 13. Стрижков И. Г. Оптимизация электрооборудования мостового комплекса на базе
дождевальной машины «Кубань» / И. Г. Стрижков, В. В. Помазанов, С. Л. Коляда //.
В кн.: Энергосбережение в с.х., ч. 2. Тезисы докл. междун. Науч.-техн. конф.: — М. 1998.
14. Стрижков И. Г. Экономическая эффективность электрификации процессов в полеводстве с использованием мостового комплекса / И. Г. Стрижков, В. В. Помазанов, Ю. В. Воронов //.
В кн.: Вопросы электрификации сельского хозяйства. Тр. КГАУ. Вып. 370 (398), Краснодар, 1998, с. 192−199.
- 15. Стрижков И. Г. Электрооборудование технологических комплексов орошаемого земледелия / Автореф. дисс. на соиск. … д.т.н. Зерноград, 2001.
- 16. Стрижков И. Г. Двухскоростной синхронно-асинхронный двигатель / И. Г. Стрижков, Е. Н. Чеснюк. // Механизация и электрификация с.х., 2015, № 10, с. 7−10.
- 17. Авт. свид. СССР № 896 735. Многодвигательный электропривод / Е. Н. Начинкин, И. Г. Стрижков, В. И. Помазанов. Опубл. 07.01.82 БИ № 1
- 18. Стрижков И. Г. Анализ и перспективы развития электрификации аграрного сектора экономики Краснодарского края / И. Г. Стрижков // В кн.: Электромеханические преобразователи энергии. Том 1. Матер. конф., Краснодар, 2004, с. 16−22.