Корректность задачи адаптивного управления диаграммой направленности антенны в неоднородной среде
Управление диаграммой направленности на практике осуществляется коррекцией волнового фронта излучателя, а основной причиной, ухудшающей фокусировку как оптической, так и акустической волны на приемнике, являются неоднородности среды распространения, как регулярные, так и случайные. В оптической связи для компенсации крупномасштабных флуктуаций скорости ветра, тепловой дефокусировки в нерегулярной… Читать ещё >
Корректность задачи адаптивного управления диаграммой направленности антенны в неоднородной среде (реферат, курсовая, диплом, контрольная)
Создание как оптического, так и акустического высокоскоростного канала двухсторонней связи с мобильным объектом является в настоящий момент не решенной, но в соответствии с современными тенденциями развитии информационно-телекоммуникационных навигационных систем практически актуальной задачей [1]. Ее решение требует создания антенн с синтезированной апертурой [2], обладающих одновременно широкой полосой и высокой чувствительностью, например — фазированных решеток [3]. Адаптивное управление диаграммой направленности передающей антенны позволяет фокусировать излучение на приемнике, а адаптивное управление приемной антенной позволяет осуществлять пространственную фильтрацию помех, направление на источник которых неизвестно [4].
Управление диаграммой направленности на практике осуществляется коррекцией волнового фронта излучателя, а основной причиной, ухудшающей фокусировку как оптической [5], так и акустической [6] волны на приемнике, являются неоднородности среды распространения, как регулярные, так и случайные. В оптической связи для компенсации крупномасштабных флуктуаций скорости ветра, тепловой дефокусировки в нерегулярной среде и др. с успехом используется метод апертурного зондирования, численному исследованию которого посвящен ряд работ [7]. Применимость в гидроакустических системах адаптивных фазированных антенных решеток [8] и параметрических антенн, которые формируют направленное излучение в пределах небольших телесных углов при практически полном отсутствии бокового поля [9] в известной мере ограничивается неидентичностью фазовых характеристик гидроакустических преобразователей, размещаемых в узлах антенных решеток. Несмотря на значительные усилия, предпринятые по совершенствованию конструкций гидроакустических антенн [10] и исследованию влияния конструктивных параметров на их эффективность [6, 11], обеспечение идентичности пьезокерамических датчиков является в настоящее время нерешаемой проблемой.
Разброс фазовых характеристик элементов антенной решетки в определенной мере эквивалентен наличию дополнительной неоднородности среды распространения и может быть компенсирован методами апертурного сканирования, если в качестве приемника использовать антенную решетку, аналогичную излучающей, и измерять распределение комплексной амплитуды волны в плоскости матричного приемника. Современные методы оценивания угла фазового сдвига между двумя квазигармоническими сигналами [12] обеспечивают необходимую для устойчивой работы системы точность измерений.
Комплексная амплитуда гармонической волны в неоднородной среде с фазовой скоростью c® удовлетворяет уравнению Гельмгольца:
. (1).
Положим /c® = k [1 + n®].
Для параксиальных волн, распространяющихся вблизи продольной оси z, положим.
A (x, y, z) = Am (x, y, z) exp (ikz), (2).
где функция Am (x, y, z) меняется в направлении z, то есть в продольном, медленно в сравнении со скоростью изменения в сечении (x, y), то есть в поперечном направлении. Тогда, подставляя выражение (2) в уравнение (1) и пренебрегая слагаемым 2Am/z2, получаем параболическое уравнение:

(3).
где A0(x, y) — комплексная амплитуда волны в сечении z = 0. Для слабо неоднородной среды при |n®| << 1 это уравнение можно решать методом последовательных приближений, положив Am® = A1® + A2® +…, где |A2®| ~ |n®||A1®|. Уравнение (3) распадается на два уравнения с соответствующими начальными условиями:

(4).

. (5).
Для решения уравнений (4) и (5) методом углового спектра положим.
(7).
Выполняя над уравнениями (4) и (5) преобразования Фурье вида (7), получим обыкновенные дифференциальные уравнения.

(8).

(9).
где обозначено.

. (10).
Решение однородного уравнения (8) имеет вид.

.
поэтому с учетом формулы (6) получаем.

. (11).
Решение неоднородного уравнения (9) имеет вид.

(12).
поэтому с учетом формулы (6) получаем.

(13).
Выберем оси x и y в плоскости решетки излучателей, а ось z нормальной к ней.
Для того чтобы задать начальное распределение комплексной амплитуды в виде среза гауссового пучка:

.
на решетке излучателей следует задать следующее распределение:

. (14).
Здесь DT — ширина гауссового пучка на транспаранте передатчика, RT — радиус кривизны волнового фронта на передатчике, AT — комплексная амплитуда излучения в центре передатчика, б и в — полярный и нормальный углы волнового вектора, которые можно считать малыми.
Тогда, используя формулы (7) и (11), получим выражение для комплексной амплитуды гауссового пучка на расстоянии z от передатчика:

(15).

где — дифракционная длина пучка,.
. (16).
Уравнение (15) описывает гауссов пучок с шириной.

и радиусом кривизны.
.
Координата перетяжки.
(17).
достигает максимума, равного zD/2, при.
RT = - zD.
Минимальная ширина пучка достигается в точке перетяжки и равна.
.
Отклонение точки перетяжки гауссового пучка от центра приемника может быть обусловлено как погрешностью в определении расстояния от передатчика до приемника, так и неоднородностью среды распространения.
Пусть A (x, y, z1) — комплексная амплитуда пучка на приемнике, сформированная при комплексной амплитуде A0(x, y) на передатчике, где z1 — координата приемника. Найдем коррекцию A0(x, y) комплексной амплитуды на передатчике, создающей на приемнике оптимальное распределение комплексной амплитуды A1(x, y, z1), при котором точка перетяжки находится в центе приемника, то есть z1 = z0. Обозначив отклонение комплексной амплитуды на приемнике от оптимальной.
A (x, y, z1) = A (x, y, z1) — A1(x, y, z1), получим:

.
Тогда из формул (6), (7) и (11) можно получить:

.

.
а затем найти коррекцию комплексной амплитуды на передатчике:
(18).
Из формулы (18) следует возможность адаптивной коррекции диаграммы направленности передающей антенны по измеренному в плоскости приемника распределению комплексной амплитуды излучения. Поскольку ядро интегрального преобразования в правой части формулы (18) непрерывно и ограничено по модулю, задача адаптивного управления является корректной.
При численном моделировании процесса управления диаграммой направленности антенны в неоднородной среде использовалась модель показателя преломления в виде суммы детерминированной и случайной составляющих:

.
В качестве детерминированных составляющих выступают линейные функции координат, а в качестве случайной — «облачка» случайного размера, расположенные в случайном месте:

.
Здесь n0i, x0i, y0i, z0i, i и I — случайные величины.
Рассмотрим область пространства, в начале координат которого расположена антенная решетка передатчика размером 2Lx2Ly. Проведем дискретизацию этой области с шагами.
x = Lx/Kx, y = Ly/Ky и z.
Область пространства ограничим размерами.
2Dx2DyDz, где Dx = 2Mxx, Dy = 2Myy, Dz = Mzz,.
а Mx, My и Mz являются степенями двойки. Дискретный вариант показателя преломления примет вид:

.

В качестве модели закона работы антенной решетки передатчика используем выражение (14) с заданной шириной гауссового пучка на передатчике DT и радиуса кривизны волнового фронта на передатчике RT. В пределах антенной решетки дискретный вариант выражения (14) примет вид:
а в остальной области:

Спектр a0(kx, ky) можно рассчитать с помощью выражения (7), используя дискретное преобразование Фурье:
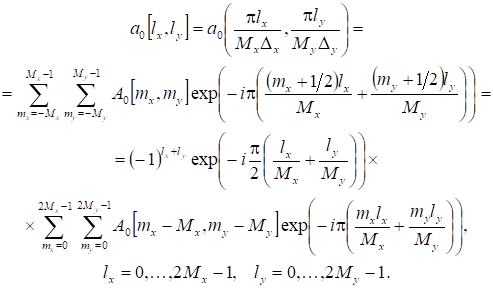
Это выражение подготовлено к использованию двумерного алгоритма быстрого преобразования Фурье (БПФ).
На следующем этапе в соответствии с выражением (11) с помощью обратного БПФ рассчитаем распределение A1(x, y, z):
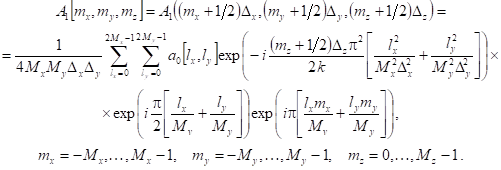
Видно, что расчет сводится к применению Mz раз алгоритма БПФ к последовательности.

для каждого значения mz.
На следующем шаге найдем дискретный образ функции b1(kx, ky, z), определенной выражением (10):
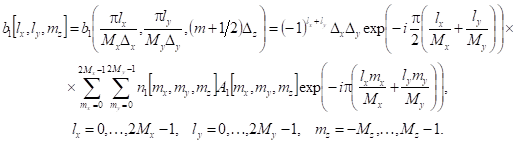
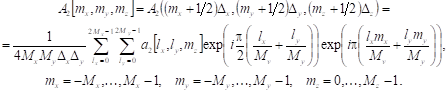
Затем в соответствии с выражением (12) вычислим спектр a2(kx, ky, z) как дискретную свертку:

и по формуле (13) с помощью обратного БПФ найдем функцию A2(x, y, z):
На последнем этапе вычислим комплексную амплитуду волны в соответствии с формулой (2):

.
Для апробации разработанного алгоритма проведено численное моделирование диаграмм направленности оптического излучателя с помощью программы, реализующей описанный алгоритм. При численном моделировании использовались аналитические выражения (15) и (16), полученные для случая = 0 и = 0. Их дискретный вариант имеет вид:
Для того чтобы описанный метод давал верные результаты, необходимо, чтобы спектры функций A0(x, y), A1(x, y, z) и A2(x, y, z) были ограничены величинами и, а интервалы дискретизации выбирались в соответствии с теоремой Котельникова [13]:

.
На рис. 1 показаны полученные с помощью описанной программы зависимости амплитуды поля от координат A1(x, y1, zi) и A1(x1,y, zi), полученные при следующих параметрах транспаранта и области пространства, в которой производился расчет:
Lx = Ly = 0,05 м,.
Dx = Dy = 0,16 м,.
x = y = 0,0025 м,.
z = 0,4 м, Kx = Ky = 20, Mx = My = 64,.
Mz = 1024, DT = 0,0125, RT = -350, = 1 мкм, = = 0.
Рассчитанная по формуле (17) координата перетяжки при таких параметрах z0 = 310,5 м. Графики слева на рис. 1 соответствуют z1 = 0, справа — z2 = 310,8 м.

Рис. 1 Аналитические (линия) и численные (точки) зависимости амплитуды поля от координат A1(x, y1, zi) и A1(x1,y, zi) при x1 = 0, y1 = 0, z1 = 0 и z2 = 310,8 м
На рис. 2 показаны соответствующие диаграммы, на которых черным цветом показаны максимальные, а светлым — минимальные значения. На рис. 3 показаны аналитическая и полученная численно зависимости A1(x1,y1,z).
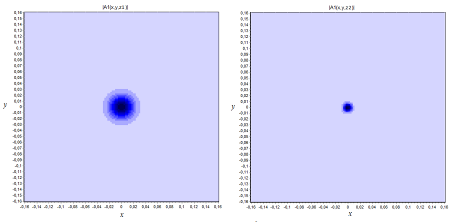
Рис. 2 Диаграммы A1(x, y, z1) и A1(x, y, z2) при z1 = 0 и z2 = 310,8 м
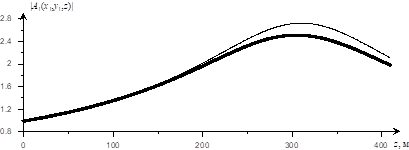
Рис. 3 Аналитическая (тонкая линия) и численная (толстая линия) зависимости амплитуды поля A1(x1,y1,z) при x1 = 0 и y1 = 0
Видно, что полученные численно и аналитически результаты хорошо совпадают, а координата перетяжки, определенная по графику A1(x1,y1,z) (рис. 3), с точностью до z, составляет 311,2 м. На рис. 2 хорошо видно улучшение фокусировки в области z0.
На рис. 4 показаны диаграммы A1(x, y, z2) (z2 = 310,8 м) для углов = 1,210−4 и = 1,410−4. Расчет смещений фокуса для этих углов дает 0,037 м и 0,044 м соответственно. На рисунках видно, что получаются именно такие смещения.
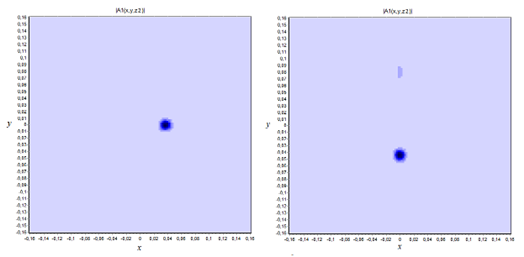
Рис. 4 Диаграммы A1(x, y, z2) при = 1,210−4, = 0 (слева) и = 0, = 1,410−4 (справа) в точке перетяжки (при z2 = 310,8 м)
Результаты численного моделирования подтверждают, что в первом приближении задача управления диаграммой направленности передатчика с синтезированной апертурой по измеренному в плоскости приемника распределению комплексной амплитуды волны является корректной. Это позволяет создать систему адаптивной коррекции диаграммы направленности излучателя, оптимальной для обеспечения максимальной пропускной способности канала связи.
Исследование выполнено при финансовой поддержке РФФИ и Администрации Волгоградской области в рамках научного проекта 15−47−2 297 «р_а».
- 1. Asadov H., Ismaylov K. Information Method for Synthesis of Optimal Data Subsystems Designated for Positioning, Location and Remote Sensing Systems // Positioning. 2011. № 2. pр. 61 — 64.
- 2. Stergiopoulos S. Implementation of adaptive and synthetic aperture beamformers in sonar systems // Proc. IEEE. 1998. Vol. 86. № 2. p. 358.
- 3. Autrey S.W. Passive Synthetic Arrays // J. Acoust. Soc. Am. August 1988. Vol. 84, pp. 592 — 598.
- 4. Lasky M., Doolittle R. D., Simmons B.D., Lemon S.G. Recent progress in towed hydrophone array research // IEEE J. Oceanic Eng. 2004. Vol. 29. № 2. pp. 374 — 387.
- 5. Osche G.R. Optical detection theory for laser applications. Wiley-Interscience. Berlin. 2002. 418 p.
- 6. Кириченко И. А. Повышение эффективности направленных свойств адаптивных гидроакустических систем с параметрическими антеннами // Инженерный вестник Дона. 2016. № 4. URL: ivdon.ru/ru/magazine/archive/n4y2016/3845/.
- 7. Егоров К. Д., Чесноков С. С. Апертурное зондирование в задачах фокусировки мощных световых пучков при пульсациях скорости ветра на трассе // Квантовая электроника. 1987. т. 14. № 6. с. 1269 — 1273.
- 8. Sullivan E.J. Passive Acoustic Synthetic Processing // IEEE Ocean. Eng. Soc. Newsletter. 2003. Vol. 38. № 1. pp. 21 — 24.
- 9. Воронин В. А., Тарасов С. М., Тимошенко В. А. Гидроакустические параметрические системы. Ростовское областное книгоиздательство. 2004. 400 с.
- 10. Митько В. Н., Эсси-Эзинг А. С. Проектирование и моделирование антенны гидролокатора бокового обзора // Инженерный вестник Дона. 2016. № 2. URL: ivdon.ru/ru/magazine/archive/n1y2016/3534.
- 11. Кириченко И. А., Котов В. Ю., Лонкин П. В., Слуцкий Д. С. Оценка влияния конструктивных характеристик на направленность гидроакустических антенн // Инженерный вестник Дона. 2015. № 4. URL: ivdon.ru/ru/magazine/archive/n4y2015/3483.
- 12. Игнатьев В. К., Станкевич Д. А. Оптимизация метода измерения угла фазового сдвига между двумя квазигармоническими сигналами // Инженерный вестник Дона. 2015. № 4. URL: ivdon.ru/ru/magazine/archive/n4p2y2015/3490/.
- 13. Ifeachor E.C., Jervis B.W. Digital Signal Processing. A Practical Approach. Prentice Hall. Second Edition. 2002. 960 p.