Разработка и моделирование трехконтурной системы управления электромагнитным подшипником
Таким образом, электромагнитные подшипники, оснащенные трехконтурной системой управления с релейным регулятором тока, обладают высоким быстродействием, но не обладают большой статической жесткостью. Провалы ротора под действием внешних возмущающих сил, составляющие 1% от допустимого зазора между подшипником и ротором позволяют использовать такую систему в установках, где необходимо высокое… Читать ещё >
Разработка и моделирование трехконтурной системы управления электромагнитным подшипником (реферат, курсовая, диплом, контрольная)
Основными потребителями энергоресурсов в газовой промышленности являются газотранспортные предприятия (таблица № 1.).
Таблица № 1. Основные потребители электроэнергии в газовой промышленности.
№ п/п. | Подотрасли. | Потенциал энергозатрат, %. | |
1. | Транспорт газа. | 69, 7. | |
2. | Распределение газа. | 7, 5. | |
3. | Электротеплоснабжение. | 7, 5. | |
4. | Добыча газа, конденсата, нефти. | 7, 0. | |
5. | Переработка газа. | 4, 6. | |
6. | Подземное хранение газа. | 3, 5. | |
7. | Бурение и капремонт скважин. | 0, 2. | |
Это связано с главной особенностью магистрального транспорта газа — при прохождении газа по трубопроводу возникает трение потока о стенку трубы, что вызывает потерю давления. Например, при расходе газа 90 млн. м3/сут. по трубопроводу диаметром 1420 мм давление убывает с 7, 6 до 5, 3 Мпа на участке протяженностью 110 км. Поэтому транспортировать природный газ в достаточном количестве и на большие расстояния только за счет естественного пластового давления невозможно.
Повышение давления газа на компрессорных станциях (КС) осуществляется в одну, две и три ступени с помощью поршневых или центробежных нагнетателей.
Оптимальный режим эксплуатации магистрального газопровода заключается в максимальном использовании его пропускной способности (газоподачи) при минимальных энергозатратах на компримирование, охлаждение и транспортировку. В настоящее время одним из направлений в совершенствовании, повышении надежности и экономической эффективности газоперекачивающих агрегатов является применение электромагнитных подшипников в конструкции приводных двигателей и газовых нагнетателей [1].
В работе, на примере газового нагнетателя мощностью 16мВт перекачивающей станции «Помарская» газопровода «Уренгой — Помары — Ужгород», рассмотрена возможность построения системы управления радиальными и осевыми электромагнитными подшипниками (ЭМП). Рабочие зазоры между статором и ротором нагнетателя составляют 0.1 мм при весе ротора нагнетателя около одной тонны.
Известны несколько принципов построения подобных систем управления [2]:
- — одноконтурные системы управления, синтезированные методом решения обратных задач динамики;
- — двухконтурные и трехконтурные системы управления, построенные по принципу подчиненного регулирования координат.
В разомкнутом состоянии система является неустойчивой. Постоянная времени внутреннего контура тока достаточно велика (~ 50 мс), что приводит к необходимости большой форсировки по источнику питания [3]. В данной работе выбран метод синтеза системы управления по принципу системы подчиненного регулирования координат. Синтезируемая по такому принципу система управления характеризуется высоким быстродействием, простотой технической реализации (как средствами аналоговой, так и средствами микропроцессорной техники) и простотой ограничения регулируемых координат (ток, скорость, перемещение) [4].
Настройка системы производится путем последовательной оптимизации контуров регулирования. На начальном этапе производится разработка и имитационное моделирование внутреннего контура тока, в программном комплексе «Matlab Simulink» [5]. По результатам проведен анализ трех вариантов построения регулятора тока (рис.1).
управление электромагнитный подшипник нагнетатель.
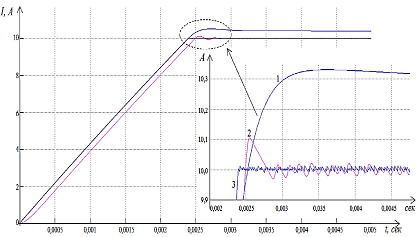
- 1 — контур тока с ПИ регулятором;
- 2 — контур тока с релейным регулятором;
- 3 — контур тока с релейным регулятором в скользящем режиме.
Рисунок 1 — Переходные процессы в контуре тока при различных регуляторах
Анализ переходных процессов показывает, что внутренний контур тока с пропорционально-интегральным (ПИ) регулятором является астатическим как по заданию, так и по возмущению (кривая 1, рис. 1), это объясняется тем, что выходное напряжение силового преобразователя ограничивается на уровне 220 В. Согласно рис. 2 показано, что релейный регулятор тока обладает большим быстродействием, по сравнению с ПИ регулятором (кривая 2, рис. 1). Релейный регулятор тока за счет создания мощной форсировки практически полностью компенсирует постоянную времени внутреннего контура. На практике релейный регулятор имеет аппаратную (реле), электронную (электронная схема) или программную (микропроцессорное устройство) реализацию. Следует отметить, что релейный регулятор, выполненный с гибкой обратной связью по току (при этом обеспечивается режим, близкий к скользящему), обладает наибольшим быстродействием и имеет практически апериодический процесс нарастания тока (кривая 3, рис. 1). Таким образом, в качестве регулятора тока целесообразно применение релейного регулятора, работающего в скользящем режиме [6].
Практическое преимущество многоконтурных систем управления заключается в том, что настройка контуров регулирования осуществляется независимо и последовательно. Следующим этапом после настройки внутреннего контура тока, является построение трехконтурной системы управления, структура которой представлена на рис. 2 [7]. Для оптимизации контуров регулирования скорости (внутреннего) и контура положения (внешнего) используется настройка на модульный оптимум. В качестве датчика главной обратной связи используется бесконтактный датчик, измеряющий перемещение ротора в поле электромагнитов. Коэффициент передачи датчика kдп, В/м, выбран таким образом, чтобы при максимально возможном смещении ротора y=0, 2 мм, сигнал датчика был равен 10 В. Для выделения сигнала обратной связи по скорости перемещения сигнал датчика положения ротора дифференцируется и вводится в систему с коэффициентом передачи kосс, В/с-1[8].
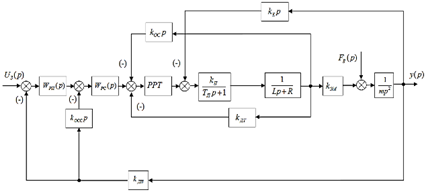
Рисунок 2 — Структурная схема трехконтурной системы управления с релейным регулятором тока.
В соответствии со структурной схемой (рис. 2) система управления реализована в виде соответствующей имитационной модели в программном комплексе «Matlab Simulink».
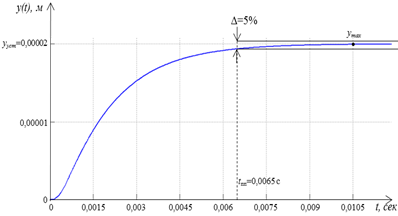
Рисунок 3 — Переходный процесс по управляющему воздействию.
Моделирование позволяет оценить качество переходных процессов при реализации системы управления с релейным регулятором в контуре тока. Среди возможных режимов, протекающих в системах управления, важное значение имеет переходный процесс, возникающий при быстром (в пределе мгновенном) изменении задающего воздействия или возмущения от одного значения до другого [9]. В рассматриваемой системе отсутствует перерегулирование, выходная координата y максимально приблизилась к заданному значению yуст (рис. 3). Время переходного процесса составляет tпп=0, 0065 с.
Рассмотрено изменение режима работы системы, возникшее в результате прикладываемого к ней внешнего воздействия. На рис. 4 приведен график переходного процесса в системе при отработке скачкообразного возмущающего воздействия Fв=20 000 Н.
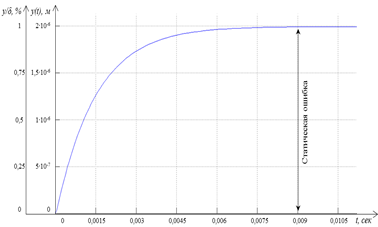
Рисунок 4 — Переходный процесс по возмущению при Fв=20 000 Н.
Время переходного процесса составляет tпп=0, 0065 с. Анализ переходного процесса по возмущающему воздействию (рис. 4) показывает, что система обладает статической ошибкой, составляющей 1% от допустимого зазора д.
Таким образом, электромагнитные подшипники, оснащенные трехконтурной системой управления с релейным регулятором тока, обладают высоким быстродействием, но не обладают большой статической жесткостью [10]. Провалы ротора под действием внешних возмущающих сил, составляющие 1% от допустимого зазора между подшипником и ротором позволяют использовать такую систему в установках, где необходимо высокое быстродействие, а не максимальная жесткость и нагрузочная способность.
Полученные результаты могут служить теоретической основой для решения актуальных на сегодняшний день задач, связанных с движением роторов в поле электромагнитных подшипников, таких как исследование устойчивости, анализ динамики переходных режимов (пуск-останов, смена режима работы), отклик системы на ударное (импульсное) возмущение.
- 1. А. С. Абдурагимов, А. В. Носков, А. П. Сарычев Опыт применения магнитных подшипников в компрессорах ГПА // Труды 15-ого Международного симпозиума «Потребители производители компрессоров и компрессорного оборудования». — СПб., 2010. — 128 с.
- 2. Журавлев Ю. Н. Активные магнитные подшипники: теория, расчет, применение. СПб.: Политехника, 2003. 206 с.
- 3. В. Г. Титов, А. С. Плехов, К. А. Бинда, Д. Ю. Титов Управление энергосберегающими полупроводниковыми преобразователями // Инженерный вестник Дона, 2013. № 4 URL: ivdon.ru/magazine/archive/n4y2013/1909/.
- 4. Schweitzer G., Maslen E.H. Magnetic bearings. Theory, design, and application to rotating machinery. Berlin Heidelberg: Springer-Verlag, 2009. pp. 1−24.
- 5. Черных И. В. Моделирование электротехнических устройств в MatLAB, Simulink и SimPowerSystems. М.: ДМКПресс; СПб.: Питер, 2008. 288 с.
- 6. А. Е. Наумец, Р. С. Таганов, Г. М. Мирясов, В. Г. Титов, А. Н. Кузменков Оптимизация контура регулирования тока электромагнитного подшипника // Труды Нижегородского государственного технического университета им. Р. Е. Алексеева. Нижний Новгород: НГТУ им. Р. Е. Алексеева, 2013. № 5(102), с. 298−303
- 7. А. И. Нефедьев, В. С. Поляков, С. В. Поляков Математическая модель подвески подвижной части электроизмерительного прибора// Инженерный вестник Дона, 2013 № 3 URL: ivdon.ru/ru/magazine/archive/n3y2013/1788/.
- 8. Кузменков А. Н., Мирясов Г. М., Титов В. Г. Управление магнитными подшипниками мощных вращающихся агрегатов // Труды VIII Международной (XIX Всероссийской) конференции по автоматизированному электроприводу АЭП-2014. Саранск: Издательство Мордовского университета, 2014. Т.1, с. 226−228.
- 9. Bleuler H. Magnetic levitation: a challenge for control design in mechatronics // Toshiba Chair for Intelligent Mechatronics. 2011. V. 44, N 12. pp. 578−583.
- 10. А. П. Сарычев, И. Г. Руковицын Математическая модель ротора для анализа управления магнитными подшипниками // Труды НПП ВНИИЭМ. М., 2008. Т 107, с.11−15.