Структурная схема асинхронного электропривода с регулированием напряжения статора
Примем, то есть механическая характеристика асинхронною двигателя в зоне регулирования скорости принимается абсолютно мягкой. Эго допущение может быть приемлемым для синтеза параметров регулятора скорости, так как основной диапазон регулирования скорости расположен в зоне неустойчивых участков механических характеристик двигателя. Однако исследование переходных процессов необходимо производить… Читать ещё >
Структурная схема асинхронного электропривода с регулированием напряжения статора (реферат, курсовая, диплом, контрольная)
Линеаризованная структурная схема системы «тиристорный регулятор напряжения — асинхронный двигатель (ТРН-АД)» с отрицательной обратной связью по скорости, соответствующая функциональной схеме рис. 6.24, приведена на рис. 6.30.

Рис. 6.30. Структурная схема асинхронного электропривода с регулированием напряжения статора.
На рис. 6.30. приняты следующие обозначения:
 - передаточная функция регулятора скорости;
- передаточная функция регулятора скорости;
 - коэффициент обратной связи по скорости, В • с/рад;
- коэффициент обратной связи по скорости, В • с/рад;
 - коэффициент передачи датчика скорости, В • с/рад;
- коэффициент передачи датчика скорости, В • с/рад;
 - коэффициент согласования, о. с.;
- коэффициент согласования, о. с.;
 - коэффициент передачи и постоянная времени тиристорного регулятора напряжения;
- коэффициент передачи и постоянная времени тиристорного регулятора напряжения;
 - момент инерции электропривода.
- момент инерции электропривода.
В качестве расчетного значения коэффициента чувствительности по моменту  принимаем его максимальное значение
принимаем его максимальное значение  , при котором условия устойчивости контура регулирования скорости наихудшие.
, при котором условия устойчивости контура регулирования скорости наихудшие.
Примем  , то есть механическая характеристика асинхронною двигателя в зоне регулирования скорости принимается абсолютно мягкой. Эго допущение может быть приемлемым для синтеза параметров регулятора скорости, так как основной диапазон регулирования скорости расположен в зоне неустойчивых участков механических характеристик двигателя. Однако исследование переходных процессов необходимо производить с учетом максимального положительного значения
, то есть механическая характеристика асинхронною двигателя в зоне регулирования скорости принимается абсолютно мягкой. Эго допущение может быть приемлемым для синтеза параметров регулятора скорости, так как основной диапазон регулирования скорости расположен в зоне неустойчивых участков механических характеристик двигателя. Однако исследование переходных процессов необходимо производить с учетом максимального положительного значения  , при котором условия устойчивости системы также наихудшие.
, при котором условия устойчивости системы также наихудшие.
Разомкнутый контур скорости, настроенный на модульный оптимум, должен иметь следующую передаточную функцию:
 (6.55).
(6.55).
где  - коэффициент настройки на модульный оптимум контура скорости;
- коэффициент настройки на модульный оптимум контура скорости;  - стандартный коэффициент настройки.
- стандартный коэффициент настройки.
Передаточная функция разомкнутого контура скорости рассматриваемой системы (см. рис. 6.30) определяется следующим образом:
 (6.56).
(6.56).
С целью упрощения решения задачи синтеза параметров регулятора скорости понизим порядок передаточной функции контура скорости. Для чего найдем суммарную малую постоянную времени  , тогда выражение (6.56) преобразуется к виду.
, тогда выражение (6.56) преобразуется к виду.
 (6.57).
(6.57).
Приравнивая правые части выражений (6.56) и (6.57) и решая полученное уравнение относительно передаточной функции регулятора скорости, получаем.
 (6.58).
(6.58).
Если принять равными  , то регулятор скорости будет иметь передаточную функцию.
, то регулятор скорости будет иметь передаточную функцию.
 (6.59).
(6.59).
Таким образом, при настройке контура скорости на модульный оптимум, регулятор скорости будет пропорционального типа с коэффициентом передачи 
Оценим в первом приближении устойчивость электропривода, выполненного в соответствии со структурной схемой (см. рис. 6.30), для чего найдем передаточную функцию замкнутой системы по управляющему воздействию.
 (6.60).
(6.60).
где 
 - коэффициенты характеристического уравнения.
- коэффициенты характеристического уравнения.
Из критерия Льенара — Шипара для характеристического уравнения третьего порядка следует, что рассматриваемая система будет устойчива при выполнении условия:
 (6.61).
(6.61).

Система уравнений (6.61) справедлива для реальных параметров электроприводов как для положительных, так и отрицательных значений жесткости 
В тех случаях, когда электропривод с П-регулятором скорости не обеспечивает заданных показателей статической погрешности механических характеристик в принятом диапазоне регулирования скорости, контур скорости следует настраивать на симметричный оптимум.
Разомкнутый контур скорости, настроенный на симметричный оптимум, должен иметь следующую передаточную функцию:
 (6.62).
(6.62).
где  - коэффициент настройки контура скорости на симметричный оптимум;
- коэффициент настройки контура скорости на симметричный оптимум;  - стандартный коэффициент настройки.
- стандартный коэффициент настройки.
Передаточная функция разомкнутого контура скорости (см. рис. 6.30) с учетом суммарной малой постоянной времени определяется следующим уравнением:
 (6.63).
(6.63).
Приравнивая правые части выражений (6.62) и (6.63) и решая полученное уравнение относительно передаточной функции регулятора скорости, получим.
 (6.64).
(6.64).
где  - коэффициент усиления регулятора скорости;
- коэффициент усиления регулятора скорости;  - постоянная времени интегрирования регулятора скорости, с.
- постоянная времени интегрирования регулятора скорости, с.
Г рафики переходных процессов момента и скорости электроприводов, настроенных на модульный и симметричный оптимум, определены для различных  [15]. Однако для асинхронного электропривода, имеющего участок механической характеристики с положительной жесткостью
[15]. Однако для асинхронного электропривода, имеющего участок механической характеристики с положительной жесткостью  , проверка переходного процесса на устойчивость представляет практический и теоретический интерес.
, проверка переходного процесса на устойчивость представляет практический и теоретический интерес.
Для исследования системы ТРН-АД с отрицательной обратной связью по скорости «в большом» необходимо исследовать переходные режимы с учетом полной модели асинхронного двигателя.
Графики переходных процессов скорости  и момента М при пуске электропривода ТРН-АД и последующем набросе нагрузки до
и момента М при пуске электропривода ТРН-АД и последующем набросе нагрузки до  приведены на рис. 6.31. На рис. 6.32 построены динамические механические характеристики. При больших скачкообразных задающих напряжениях (
приведены на рис. 6.31. На рис. 6.32 построены динамические механические характеристики. При больших скачкообразных задающих напряжениях ( о. е.) сигнал управления регулятором скорости
о. е.) сигнал управления регулятором скорости  велик и к двигателю прикладывается полное напряжение питающей сети, переходные процессы скорости и момента близки к процессам в разомкнутом электроприводе при его пуске прямым включением в сеть. Возникают колебательные процессы момента и скорости, которые рекомендуется уменьшить увеличением инерционности тиристорного регулятора напряжения, путем введения в цепь управления тиристорами дополнительной инерционности [16] и включением задатчика интенсивности на входе электропривода.
велик и к двигателю прикладывается полное напряжение питающей сети, переходные процессы скорости и момента близки к процессам в разомкнутом электроприводе при его пуске прямым включением в сеть. Возникают колебательные процессы момента и скорости, которые рекомендуется уменьшить увеличением инерционности тиристорного регулятора напряжения, путем введения в цепь управления тиристорами дополнительной инерционности [16] и включением задатчика интенсивности на входе электропривода.

Рис. 6.31. Графики переходных процессов скорости о> и момента М при пуске и набросе нагрузки в электроприводе ТРН-АД. 
Увеличение инерционности тиристорного регулятора напряжения достигается введением на его вход дополнительного фильтра с постоянной времени  . Эти меры позволяют улучшить качество переходных процессов, снизить влияние свободных составляющих момента и обеспечить отработку управляющих сигналов с минимальными перерегулированиями момента и скорости, однако точность поддержания скорости уменьшится, так как уменьшится коэффициент усиления регулятора скорости.
. Эти меры позволяют улучшить качество переходных процессов, снизить влияние свободных составляющих момента и обеспечить отработку управляющих сигналов с минимальными перерегулированиями момента и скорости, однако точность поддержания скорости уменьшится, так как уменьшится коэффициент усиления регулятора скорости.

Рис. 6.32. Динамическая механическая характеристика при пуске и набросе нагрузки в электроприводе ТРН-АД. 
Статические механические характеристики электропривода ТРНАД с отрицательной обратной связью, но скорости возможно построить через установившиеся значения скорости и момента, полученные по результатам расчета переходных процессов. Механические характеристики электропривода ТРН-АД для задающих напряжений  и
и  приведены на рис. 6.33. Анализ механических характеристик показывает, что погрешность поддержания скорости электропривода на нижней механической характеристике с
приведены на рис. 6.33. Анализ механических характеристик показывает, что погрешность поддержания скорости электропривода на нижней механической характеристике с  составляет
составляет  %.
%.

Рис. 6.33. Механические характеристики электропривода ТРН-АД с П-регулятором скорости.
В тех случаях, когда укатанная погрешность не удовлетворяет требованиям технологического процесса, необходимо параметры регулятора скорости выбирать по симметричному оптимуму, то есть регулятор скорости должен быть пропорционально-интегральным.
Графики переходных процессов скорости со и момента М при пуске электропривода ТРН-АД с отрицательной обратной связью по скорости и ПИ-регуляторескорости при скачкообразном изменении задающего напряжения  о. е. и последующем набросе нагрузки до
о. е. и последующем набросе нагрузки до  приведены на рис. 6.34.
приведены на рис. 6.34.

Рис. 6.34. Графики переходных процессов скорости со и момента М при скачкообразном изменении задающего напряжения  о. е. и набросе нагрузки.
о. е. и набросе нагрузки.
На рис. 6.35. построены динамические механические характеристики электропривода.

Рис. 6.35. Динамические механические характеристики пуска двигателя скачкообразным изменением задающего напряжения  о. е. и последующем набросе нагрузки до
о. е. и последующем набросе нагрузки до  .
.
Графики переходных процессов скорости  и момента М при пуске электропривода ТРН-АД с ПИ-регулятором скорости от задатчика интенсивности при задающем напряжения
и момента М при пуске электропривода ТРН-АД с ПИ-регулятором скорости от задатчика интенсивности при задающем напряжения  о. е. и последующем набросе нагрузки до
о. е. и последующем набросе нагрузки до  приведены на рис. 6.36.
приведены на рис. 6.36.
При пуске электропривода от задатчика интенсивности рассчитанные переходные процессы практически совпадают с желаемыми типовыми процессами регулируемого электропривода, колебания скорости и момента при пуске и набросе нагрузки не проявляются.

Рис. 6. 36. Графики переходных процессов скорости  и момента М при пуске электропривода ТРН-АД с ПИ-регулятором скорости от задатчика интенсивности при
и момента М при пуске электропривода ТРН-АД с ПИ-регулятором скорости от задатчика интенсивности при  о. е. и набросе нагрузки до
о. е. и набросе нагрузки до  .
.
Использование ТРИ для пуска АД позволяет снизить пусковые потери на 10−15% при условии выбора оптимального времени нарастания напряжения. Установлено [17], что рациональное время нарастания напряжения составляет  с. (соответствует
с. (соответствует  о. е.). Увеличение времени нарастания напряжения приводит к росту пусковых потерь энергии, которые могут превысить потери прямого пуска. Однако при однократных пусках АД этими потерями можно пренебречь, а основным критерием выбора времени нарастания напряжения следует считать отсутствие значительных колебаний электромагнитного момента двигателя на начальных участках переходных процессов. В этом случае время нарастания напряжения может быть увеличено до
о. е.). Увеличение времени нарастания напряжения приводит к росту пусковых потерь энергии, которые могут превысить потери прямого пуска. Однако при однократных пусках АД этими потерями можно пренебречь, а основным критерием выбора времени нарастания напряжения следует считать отсутствие значительных колебаний электромагнитного момента двигателя на начальных участках переходных процессов. В этом случае время нарастания напряжения может быть увеличено до  с.
с.
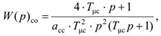
Динамические механические характеристики, рассчитанные по результатам переходных процессов пуска электропривода с задатчиком интенсивности и моментом сопротивления  о. е. и последующим набросом нагрузки до момента сопротивления
о. е. и последующим набросом нагрузки до момента сопротивления  о. с., приведены на рис. 6.37.
о. с., приведены на рис. 6.37.
В отличие от электропривода с П-регулятором скорости переходные режимы электропривода ТРН-АД с ПИ-регулятором скорости характеризуются большим временем отработки возмущающего воздействия ( о. е.). Установившиеся значения скорости для двух различных моментов сопротивления
о. е.). Установившиеся значения скорости для двух различных моментов сопротивления  о. е. и
о. е. и  о. е. отмечены на рис. 6.37 треугольниками и они практически равны.
о. е. отмечены на рис. 6.37 треугольниками и они практически равны.

Рис. 6.37. Динамические механические характеристики при пуске электропривода ТРН-АД с ПИ-регулятором скорости от задатчика интенсивности при  о. е. и набросе нагрузки до
о. е. и набросе нагрузки до  .
.
Механические характеристики электропривода ТРН-АД с ПИрегулятором скорости для задающих напряжений  и
и  приведены на рис. 6.38.
приведены на рис. 6.38.
Статические механические характеристики электропривода ТРНАД с ПИ-регулятором скорости построены через установившиеся значения скорости и момента, полученные по результатам расчета переходных процессов.

Рис. 6.38. Механические характеристики электропривода ТРН-АД с ПИ-регулятором скорости.
Анализ механических характеристик показывает, что погрешность поддержания скорости электропривода на нижней механической характеристике с  составляет
составляет  %, то есть механические характеристики замкнутой системы электропривода с ПИ-регулятором скорости близки к астатическим.
%, то есть механические характеристики замкнутой системы электропривода с ПИ-регулятором скорости близки к астатическим.
Выбор типа регулятора скорости в электроприводе ТРН-АД определяется в конечном итоге требованиями технологического процесса.