Трансформаторные измерители рассогласования
Ров, будут отсутствовать уравнительные токи. Эти токи возникнут, если роторы в пространстве будут повернуты на разные углы. В этом случае появление уравнительных токов в трехпроводной линии приведет к возникновению равных и противоположно направленных моментов, стремящихся к совмещению угловых положений роторов в пространстве. В полученном соотношении второе слагаемое определяет динамическую… Читать ещё >
Трансформаторные измерители рассогласования (реферат, курсовая, диплом, контрольная)
Измерители рассогласования на сельсинах
Сельсин, используемый для создания измерителя рассогласования, — электрическая машина, по конструкции схожая с синхронным генератором или с синхронным двигателем. На статоре его располагается трехфазная обмотка, а на роторе — однофазная, концы которой с помощью двух коллекторных колец и щеток выводятся наружу. Существуют сельсины, у которых на статоре располагается однофазная обмотка, а на роторе — трехфазная, концы которой через три коллекторных кольца со щетками выводятся наружу. Оба типа сельсинов могут быть использованы в индикаторном режиме при построении систем синхронной связи, однако для построения ИР для следящих систем используют первый тип сельсинов. На рис. 3.67 представлены сельсины первого типа (1).
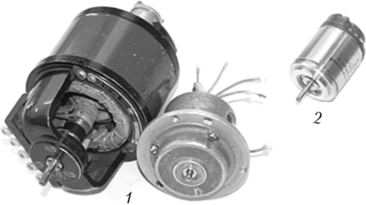
Рис. 3.67. Сельсины (/) и вращающийся трансформатор (2).
Слева на рисунке сельсин для работы в сети 50 Гц, а справа для работы в сети 400 Гц. Здесь же показан вращающийся трансформатор (2) для работы в сети 400 Гц. Об этих трансформаторах речь пойдет дальше.
Схема включения сельсинов в индикаторном режиме показана на рис. 3.68. Разнесенные в пространстве сельсины соединены друг с другом трехпроводной линией связи, подключаемой к статорным обмоткам. При подключении обмоток роторов к однофазной сети переменного тока в обмотках статоров наводятся ЭДС. В случае согласованного пространственного положения роторов друг относительно друга наводимые ЭДС в обмотках статоров будут равными и противоположно направленными друг к другу. В результате в трехнроводной линии, соединяющей обмотки стато;
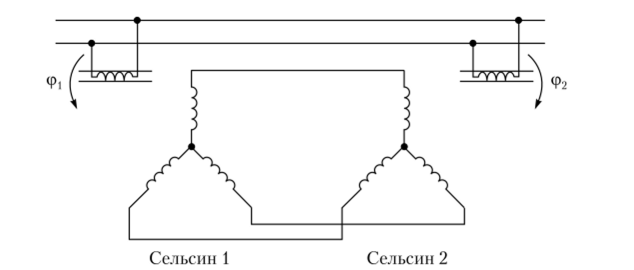
Рис. 3.68. Схема соединения сельсинов в индикаторном режиме.
ров, будут отсутствовать уравнительные токи. Эти токи возникнут, если роторы в пространстве будут повернуты на разные углы. В этом случае появление уравнительных токов в трехпроводной линии приведет к возникновению равных и противоположно направленных моментов, стремящихся к совмещению угловых положений роторов в пространстве.
Если вращать один из роторов, второй будет за ним поворачиваться (будет отслеживать поворот) так, чтобы уравнительные токи в линиях связи в итоге отсутствовали. Подобная система синхронной передачи угла является маломощной следящей системой. Она не может развивать большой момент, парирующий внешний момент на одном из валов.
Сельсины в трансформаторном режиме образуют схему, показанную на рис. 3.69, которая используется в следящих системах в качестве измерителя рассогласования.
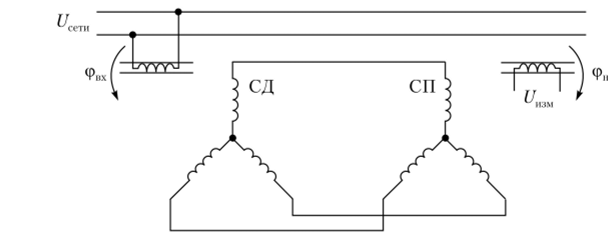
Рис. 3.69. Схема соединения сельсинов в трансформаторном режиме.
Здесь также обмотки статоров сельсинов соединены трехнроводной линией. Ротор сельсина-датчика подключается к однофазной сети переменного тока, а с ротора сельсина-приемника снимается сигнал, пропорциональный углу рассогласования между положениями роторов сельсинов. Подобная схема образует единый трансформатор, общим магнитопроводом которого являются статоры сельсинов, соединенные трехпроводной линией, а обмотки роторов являются первичной и вторичной обмотками этого пространственного трансформатора. Особенностью такого трансформатора является то, что его обмотки могут менять пространственное положение друг относительно друга и, но отношению к единому магнитонроводу.
Поясним с помощью рис. 3.70 принцип работы такого ИР путем представления его в виде трансформатора, у которого одна обмотка (пусть вто;
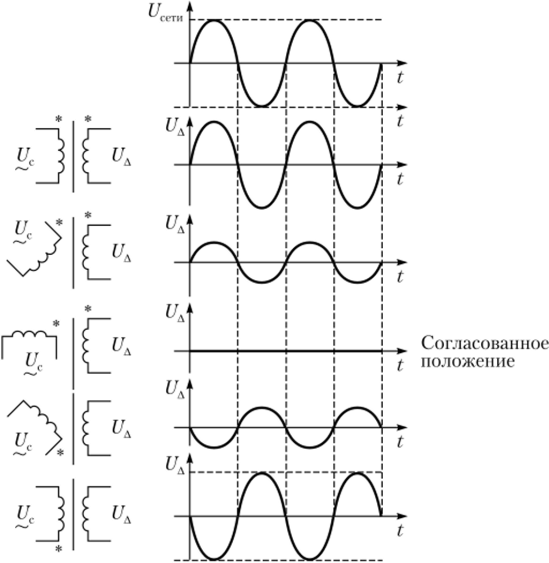
Рис. 3.70. Принцип работы ИР на сельсинах в трансформаторном режиме.
ричная) зафиксирована, а первичная поворачивается на разные углы. При этом первичная обмотка запитывается сетевым напряжением, а на вторичной обмотке фиксируется амплитуда выходного переменного напряжения в зависимости от взаимного углового расположения обмоток.
За согласованное положение принимается взаимно перпендикулярное положение обмоток роторов сельсинов в пространстве. Знак рассогласования определяется по фазовому сдвигу между напряжением сети и выходному напряжению ИР (напряжение на обмотке ротора сельсина-приемника). Этот фазовый сдвиг может быть либо 0, либо 180°.
Амплитуда переменного выходного напряжения UA пропорциональна углу рассогласования между роторами, а знак рассогласования соответствует фазе выходного напряжения по отношению к сетевому напряжению (фаза 0°, например, — положительное рассогласование, а 180° — отрицательное рассогласование).
Сигнал рассогласования такого ИР в виде переменного напряжения носит название амплитудно-модулированного сигнала, или АМ-сигнала.
Согласованное положение роторов считается таким, когда они сдвинуты друг относительно друга на 90°. Для учета этого явления в системах управления разворачивают в пространстве на 90° друг относительно друга и закрепляют статоры сельсинов. Подобная операция, как отмечалось выше, производится с ИР на потенциометрах без ограничения угла поворота.
Виды погрешностей ИР на сельсинах:
- 1) технологическая погрешность, связанная с качеством его изготовления;
- 2) погрешность, связанная с реакцией нагрузки;
- 3) динамическая погрешность.
Технологическая погрешность определяется классом точности сельсинов в соответствии с табл. 3.4.
Таблица ЗА
Классы точности сельсинов
Класс точности. | Датчики. | Приемники. |
I класс. | ±0,25°. | ±0,25°. |
II класс. | ±0,5°. | ±0,5°. |
III класс. | ±1,0°. | ±0,75°. |
Технологическая погрешность схемы ИР на сельсинах оценивается по формуле (3.28).
Погрешность, связанная с реакцией нагрузки. Возникновение этой погрешности поясняется рис. 3.70. Подключение обмотки ротора сельсинаприемника к нагрузке Ru вызывает появление тока в этой цепи и магнитного потока реакции Ф2. Этот поток раскладывается на две составляющие: продольную Ф2^, которая ослабляет основной поток Ф0, создаваемый током в обмотке ротора сельсина-датчика, и поперечную составляющую ФЪг Ослабление основного потока оказывается зависимым от угла рассогласования (р, т. е. эта погрешность нелинейно зависит от величины угла рассогласования. Чем больше сопротивление нагрузки, тем меньше погрешность от реакции нагрузки. Именно поэтому ИР стараются нагружать на высокоомную нагрузку.
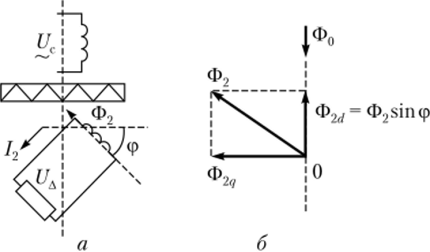
Рис. 3.71. Влияние реакции нагрузки.
Динамическая погрешность. Эта погрешность связывается с переходными процессами, которые фиксируются обмоткой ротора сельсина-приемника. Например, если вращать ротор сельсина-датчика с частотой совр, а ротор сельсина-приемника зафиксировать, то сигнал, снимаемый с обмотки ротора сельсина-приемника ?/д, будет иметь вид иметь вид, показанный на рис. 3.72.
Магнитный поток, создаваемый за счет протекания переменного тока в обмотке ротора сельсина-датчика с частотой сети со0, описывается следующим соотношением:

В соответствии с законом электромагнитной индукции.

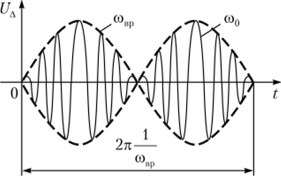
Рис. 3.72. Сигнал, снимаемый с обмотки ротора сельсина-приемника при равномерном вращении сельсина-датчика с частотой сопр.
В полученном соотношении второе слагаемое определяет динамическую погрешность ИР в данном примере. Эта погрешность отсутствует в установившемся режиме, когда отсутствует взаимное перемещение роторов сельсинов друг относительно друга. Чем выше скорость одного ротора относительно другого, тем больше динамическая погрешность.