Автоматические регуляторы.
Автоматика
Автоматические регуляторы классифицируют, как и СЛУ: по принципу управления (по отклонению, возмущению, отклонению и возмущению); виду используемой энергии (электрические, пневматические, гидравлические и др.); виду регулируемой величины (температуре, давлению, уровню, перемещению и др.); характеру воздействия на ОУ (непрерывные, дискретные); алгоритму функционирования (стабилизации, слежения… Читать ещё >
Автоматические регуляторы. Автоматика (реферат, курсовая, диплом, контрольная)
В системе автоматического регулирования можно выделить два основных функциональных элемента: объект управления (ОУ), устройство управления (УУ), или, как его часто называют, автоматический регулятор (АР). Основное назначение САР — поддерживать значение регулируемой величины на заданном уровне. Эту функцию в системе выполняет АР.
Автоматические регуляторы классифицируют, как и СЛУ: по принципу управления (по отклонению, возмущению, отклонению и возмущению); виду используемой энергии (электрические, пневматические, гидравлические и др.); виду регулируемой величины (температуре, давлению, уровню, перемещению и др.); характеру воздействия на ОУ (непрерывные, дискретные); алгоритму функционирования (стабилизации, слежения, адаптации, программному алгоритму).
Регуляторы различают также по конструктивному исполнению и законам управления. По конструктивному исполнению регуляторы могут быть приборные, аппаратные, модульные (элементные) и агрегатные (блочные).
В регуляторы приборного типа встроен измерительный прибор (автоматический потенциометр, мост, логометр, милливольтметр и др.), поэтому одновременно с показанием отклонения регулируемой величины происходит формирование сигнала управления.
В регуляторах аппаратного типа в одном корпусе объединены блок сравнения, измерительный блок, предназначенный для контроля конкретной физической величины.
Регуляторы агрегатного типа состоят из отдельных унифицированных блоков, различающихся по входным и выходным сигналам и выполняющих определенные функции. К ним относятся регуляторы «Каскад».
Автоматические регуляторы модульного типа состоят из отдельных модулей (элементов), выполняющих простейшие операции, что позволяет конструировать АР различного функционального назначения.
Регуляторы непрерывного, импульсного и цифрового действия работают по разным законам регулирования. На этом основании различают пропорциональные (П) регуляторы, интегральные (И), пропорциональноинтегральные (ПИ) и пропорционально-интегрально-дифференциальные (ПИД). Рассмотрим подробнее законы регулирования, на основе которых реализуются принципы действия названных регуляторов.
Законом регулирования называют математическую зависимость между управляющим воздействием регулятора (выходным сигналом регулятора) и отклонением e (t) действительного значения регулируемой величины у от заданного значения g0 (входного сигнала регулятора). Выбор автоматических регуляторов определяется динамическими свойствами объекта управления, необходимой точностью регулирования и видом переходного процесса регулируемой величины, который допускается технологией производства. Ниже приведено описание основных промышленных регуляторов.

Пропорциональные регуляторы (П-регуляторы) имеют передаточную функцию гдeU (p) — регулирующее воздействие; е (р) — сигнал рассогласования; kn — коэффициент усиления П-регулятора.
У данного регулятора на выходе формируется регулирующее воздействие.
С увеличением kn статическая ошибка уменьшается, однако при этом уменьшается и устойчивость системы. Поэтому при выборе значения &п следует учитывать эти оба обстоятельства. Достоинство П-регуляторов — простота и быстродействие, а также малая динамическая ошибка в начале переходного процесса. Системы автоматического регулирования с таким регулятором обладают устойчивостью. Недостаток П-регуляторов — установившаяся статическая ошибка, приводящая к остаточному отклонению регулируемого параметра.
П-регулятор применяют в том случае, если по условиям эксплуатации допускаются статическая и малая динамическая ошибки.
Частота изменения возмущающих воздействий может быть большой, но они должны изменяться в узких пределах. Если объект характеризуется большим запаздыванием, то изменение нагрузок должно быть плавным.
Пропорционально-дифференциальный регулятор (ПД-регулятор) предназначен для снижения колебательных процессов в САР. В этих регуляторах в закон управления вводят производную от отклонения г. Передаточная функция ПД-регулятора имеет вид.

Здесь кл — постоянный коэффициент обратной связи по скорости изменения ошибки s (f) — Дифференциальная составляющая демпфирует колебания, однако замедляет переходные процессы и ухудшает динамику системы управления.
Интегральный регулятор (И-регулятор) формирует на выходе регулирующее воздействие.

где ки — коэффициент передачи (усиления) И-регулятора; Ти =1 / кп — постоянная времени интегрирования.
Постоянная времени интегрирования — это время, в течение которого с момента поступления на входе регулятора постоянного воздействия е = const сигнал на выходе регулятора достигнет значения, равного значению входного сигнала е. И-регулятор имеет передаточную функцию.

Регуляторы с таким законом управления (И-регуляторы) воздействуют на ОУ пропорционально интегралу от отклонения регулируемой величины. Тем самым устраняется статическая ошибка, свойственная П-регуляторам. Вместе с тем И-регуляторам присуща большая динамическая ошибка и невысокое быстродействие, особенно в начале переходного процесса: в начальный момент входного воздействия И-регулятор вследствие своих инерционных свойств не успевает выработать достаточный управляющий сигнал. С увеличением kH уменьшаются динамическая ошибка, время регулирования, но при этом уменьшается и устойчивость САР.
И-регуляторы используют в тех случаях, когда условиями эксплуатации допускаются большие динамическая ошибка и время регулирования и не допускается статическая ошибка. И-регуляторы устанавливают на объектах с малым запаздыванием и плавным изменением возмущающих воздействий. И-регуляторы нельзя применять на ОУ без самовыравнивания, так как образованная система будет неустойчива.
Пропорционально-интегральный регулятор (ПИ-регулятор) реализует закон регулирования.

Он воздействует на ОУ пропорционально отклонению регулируемой величины и интегралу от этого отклонения. ПИ-регулятор имеет передаточную функцию следующего вида:

Как следует из формулы (2.118), ПИ-регулятор можно получить, если соединить параллельно два регулятора: пропорциональный (П) с передаточной функцией Wn{p) и интегральный (И) с передаточной функцией WH (р) (рис. 2.39, а). Интегральная составляющая обеспечивает компенсацию возможной установившейся ошибки. Уменьшение Ги ускоряет процесс компенсации, но при этом возможны колебания системы.
На рис. 2.39, б показана несколько видоизмененная схема ПИ-регулятора, называемого изодромньш регулятором. Закон регулирования для регулятора на рис. 2.39, б имеет вид.

т 1.
где Тт =——постоянная времени изодрома.
*iAi.
Изодромньш регулятор имеет передаточную функцию следующего вида:

У регулятора, показанного на рис. 2.39, а, параметры настройки независимые, а у регулятора на рис. 2.39, б — взаимосвязанные.
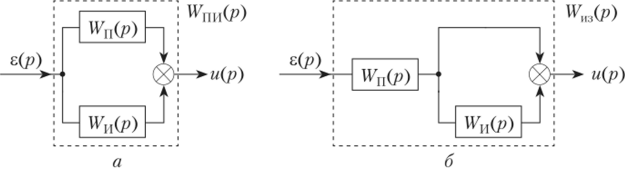
Рис. 2.39. Структурные схемы ПИ-регуляторов.
ПИ-регулятор обладает преимуществами Пи И-регуляторов, т. е. быстро реагирует на изменение нагрузки (П-составляющая) и работает без статической ошибки (И-составляющая). Поэтому его широко применяют в САР. В случае отказа канала регулирования с интегральной составляющей ПИ-регулятор будет работать как П-регулятор, что повышает надежность его работы. ПИ-регуляторы устанавливают на объекты со значительным запаздыванием при возмущающих воздействиях, изменяющихся с большой частотой и в широких пределах.
Пропорционально-интегрально-дифференциальный регулятор (ПИДрегулятор) улучшает точность и динамические свойства системы регулирования. Он реализует следующий закон регулирования:

о ПИД-регулятор имеет передаточную функцию вида.

где Т — постоянная времени дифференцирования (время предварения).
В начальный момент времени ПИД-регулятор оказывает на ОУ регулирующее воздействие пропорционально скорости изменения, т. е.
at,
которая затем уменьшается до значения, определяемого П-составляющей. После этого начинает влиять И-составляющая. Таким образом, ПИДрегулятор обладает преимуществами ПИ-регулятора и оказывает на ОУ регулирующее воздействие, пропорциональное скорости изменения e (t), что позволяет ускорить процесс регулирования.
ПИД-регулятор обладает еще одним положительным качеством — реакцией на скорость изменения нагрузки, что повышает качество технологического процесса. Такой регулятор устанавливают на объектах со скачкообразной, нечасто изменяющейся нагрузкой.
Управление объектами с самовыравниванием возможно по пропорциональному (П-регулятор) или пропорционально-интегральном}' (ПИ-регулятор) законам регулирования. В последнем случае статическая ошибка равна нулю при постоянном входном воздействии. Если объект управления описывается дифференциальными уравнениями второго порядка, то применяют пропорционально-интегрально-дифференциальный (ПИД-регулятор) закон регулирования.
Комбинированные регуляторы обеспечивают более эффективный метод повышения точности и улучшения динамических характеристик САР. Кроме обратных связей по отклонению они содержат прямые связи по задающему и возмущающему воздействиям, которые осуществляют компенсацию этих воздействий. В этом случае регулятор выбирается как Пили ПД-регулятор.
На большинстве сельскохозяйственных объектов установлены двухи трехпозиционные регуляторы, имеющие такие же статические характеристики, как и у релейных элементов. Наиболее распространены двухпозиционные регуляторы, имеющие два органа настройки: задатчик и дифференциал. Характер изменения регулируемой величины при переключениях двухпозиционного регулятора определяется видом ОУ (с самовыравниванием или без него).