Уравнения движения электропривода
Равенство Jpaо = Jdco/dt представляет собой динамический момент, который обусловливает характер движения электропривода, или, как его еще называют, режим работы электропривода. В частности, по знаку динамического момента. Таким образом, угловое ускорение при пуске отражает характер изменения момента двигателя по экспоненциальному закону по мере возрастания скорости, изменяющейся после… Читать ещё >
Уравнения движения электропривода (реферат, курсовая, диплом, контрольная)
Используя уравнение движения электропривода, изучают различные формы движения механического объекта. При составлении уравнения движения, как уже отмечалось, исходят из расчетной схемы механической части электропривода.
Наиболее общий подход к описанию динамики механических объектов дает метод уравнений Лагранжа. Согласно методу Лагранжа число уравнений, описывающих движение системы, равно числу степеней свободы исследуемой системы [2].
.УРАВНЕНИЕ ДВИЖЕНИЯ ДЛЯ ОДНОМАССОВОЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Одномассовая механическая система (рис. 1.14) не отражает некоторых важных физических свойств реальной механической сисРис. 1.14. Одномассовая механическая система
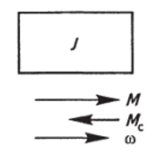
темы, давая лишь приближенное представление о действующих нагрузках в элементах кинематической цепи.
Согласно рисунку 1.14 уравнение движения электропривода с одномассовой механической частью, представляющее собой второй закон Ньютона для вращательного движения, примет следующий вид:

где М— момент двигателя, Н-м; Мс — момент сопротивления (нагрузка), Н*м; У—момент инерции механической системы, кг• м2; со —угловая скорость двигателя, рад/с; р — оператор, р = d/dt.
Равенство Jpaо = Jdco/dt представляет собой динамический момент,, который обусловливает характер движения электропривода, или, как его еще называют, режим работы электропривода. В частности, по знаку динамического момента.

где е — угловое ускорение электропривода, рад/с2; е = da/dt,
можно охарактеризовать два режима работы электропривода.
- 1. Установившийся режим, когда da/dt = 0 и момент двигателя М равен моменту сопротивления Л/с, то есть М = Мс.
- 2. Переходный режим, когда d (o/dt< 0, что соответствует замедленному движению электропривода (М<�МС) или ускоренному движению, когда d®/dt>Q (Л/> Л/с).
При ускоренном движении (dw/dt> 0) момент двигателя.

В случае замедленного движения, когда ускорение d (o/dt< 0, момент двигателя рассчитывают по формуле.

Если поддерживать постоянными в переходном режиме момент двигателя Л/ и статический момент Л/с, то движение будет.
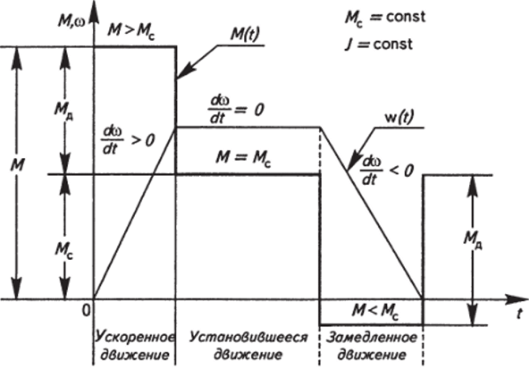
Рис. 1.15. Режимы движения электропривода.
равноускоренным при Л/> Л/с или равнозамедленным при М< Мс. Режимы движения электропривода приведены на рисунке 1.15.
Характер движения электропривода зависит от значения и знака углового ускорения.

Из уравнения (1.21) можно определить режимы работы электропривода:
е > 0 — ускоренное движение электропривода; е = const > 0 — равноускоренное движение; е = 0 — установившееся движение; е < 0 — замедленное движение; е = const < 0 — равнозамедленное движение.
Из уравнения движения электропривода (1.17) следует, что характер изменения угловой скорости в одномассовой механической части электропривода всецело зависит от момента двигателя.
Выявим, как влияет закон изменения момента двигателя на характер движения электропривода. Ранее было установлено влияние соотношения постоянных значений момента двигателя и статического момента на характер движения электропривода.
Рассмотрим экспоненциальный закон изменения момента двигателя:

где Л/нач — начальный момент, Н • м; Тм — электромеханическая постоянная времени электропривода, с; е — основание натурального логарифма; е = 2,72.
Подобное наблюдается при пуске двигателя постоянного тока независимого возбуждения (ДПТ НВ) без нагрузки (Л/с = 0). Уравнение движения электропривода тогда примет вид:

где енач — начальное угловое ускорение при пуске электропривода, рад/с2.
Угловое ускорение снижается по мере разгона двигателя и при /, = Ты е, = бнач/2,72; при /2 = 27; е2 = енач/7,4; при/3 = 3 Ты е3 = е"ач/20.
Таким образом, угловое ускорение при пуске отражает характер изменения момента двигателя по экспоненциальному закону по мере возрастания скорости, изменяющейся после интегрирования (1.24) согласно уравнению.

Выясним, как поведет себя электропривод при наличии периодической составляющей в моменте двигателя.

где Л/тах — максимальное (амплитудное) значение момента, Н • м; Q — частота вынужденных колебаний, рад/с.
Из уравнения движения электропривода (1.17) при Мс = 0.

Из (1.27) следует, что угловое ускорение электропривода.

где Стах — максимальное угловое ускорение электропривода, рад/с2,.
изменяется по периодическому закону синфазно с моментом двигателя.
Угловая скорость со (/) после интегрирования формулы (1.28).

Из формулы (1.29) следует, что угловая скорость со (/):
- 1) изменяется так же по периодическому закону, как и угловое ускорение, но имеет сдвиг по фазе с отставанием на 90° при постоянной частоте вынужденных колебаний Й;
- 2) с увеличением частоты вынужденных колебаний й амплитуда колебаний угловой скорости сотах = (ещах/й) снижается и при частоте й, стремящейся к бесконечности, также стремится к нулю при сохранении запаздывания по фазе на 90°. Причины такого поведения электропривода целесообразно выявить, используя частотные методы анализа из теории автоматического управления [3].
Найдем передаточную функцию ЭП с одномассовой механической частью из уравнения движения, применив прямое преобразование Лапласа

где р — оператор, р = d/dt.
Передаточная функция:
по управляющему воздействию

по возмущающему воздействию

что следует из структурной схемы (рис. 1.16).
Поскольку знаменатели передаточных функций (1.31) и (1.32) равны, то характер переходных процессов будет одинаков. Поэтому проанализируем поведение электропривода по управляющему воздействию М (р). Подставив в передаточную функцию W (p) значение оператора р =уй, получим амплитудно-фазовую частотную характеристику (АФЧХ).

Из уравнения (1.33) следует, что вещественная частотная характеристика Р (Й) равна нулю, а мнимая Q (й) = -j/(JQ). Тогда амплитудная частотная характеристика (АЧХ) 
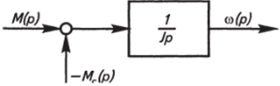
Рис. 1.16. Структурная схема одномассовой механической системы.
Рис. 1.17. Амплитудная и фазовая частотные характеристики одномассовой механической системы
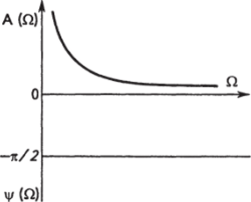
Фазовая частотная характеристика (ФЧХ).

и остается постоянной вне зависимости от частоты вынужденных колебаний (рис. 1.17).
Из анализа частотных характеристик (см. рис. 1.17) также следует, что амплитуда колебаний угловой скорости Л (й) зависит от частоты вынужденных колебаний й, а фаза Ч'(й) остается постоянной, указывая на запаздывание регулируемого параметра от управляющего воздействия. Снижение амплитуды колебаний угловой скорости с увеличением частоты вынужденных колебаний вызвано тем, что начинает проявляться инерционность механической части, которая представляет собой фильтр низких частот, отсекающий высокие частоты. Для приводов йтах = (30…60) рад/с или частота^ = йтах/(2л) = (4,8…9,6) Гц.
Разрыв АЧХ при Й = 0 свидетельствует о том, что момент двигателя остается постоянным по амплитуде (рис. 1.18, а), обеспечивая максимальное ускорение етах = Л/тах/У, с которым электрический привод разгоняется, стремясь к бесконечно большой угловой.
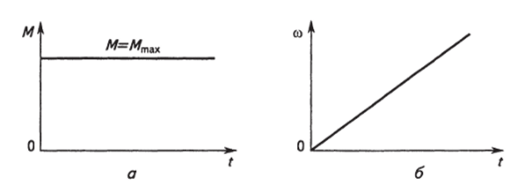
Рис. 1.18. Диаграммы момента (в) и угловой скорости (б) двигателя в одномассовой механической системе скорости, когда длительность работы привода стремится к бесконечности (рис. 1.18, б).
Вывод. Одномассовая механическая часть электропривода четко реагирует на закон изменения управляющего воздействия и представляет собой фильтр низких частот.